PCSI 2
Forces centrales conservatives
FORCES CENTRALES CONSERVATIVES
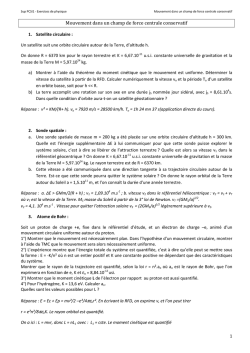
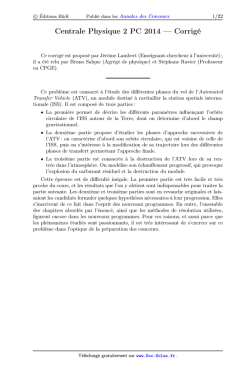
I Au cours d'un voyage interplanétaire, un vaisseau spatial de masse m = 1
t est transféré depuis la Terre jusqu'à la planète Mars. Ce transfert
Ellipse de
s'effectue suivant une orbite elliptique (ellipse d'Hohmann) tangente aux
Trajectoire
transfert
deux orbites coplanaires, pratiquement circulaires, de la Terre et de Mars,
de Mars
de rayons respectifs R1 = 1,5.108 km et R2 = 2,3.108 km, et dont le Soleil
est un foyer. On négligera l'attraction exercée par les planètes sur le
vaisseau et on ne considérera que l'attraction solaire.
On donne le masse du Soleil M = 2.1030 kg; constante de gravitation
Soleil
universelle G = 6,67.10-11 S.I.
Déterminer en fonction de R1, R2, G et M, puis calculer numériquement :
Trajectoire
1) l'excentricité e et le paramètre p de l'orbite de transfert d'Hohmann,
de la Terre
et la constante des aires C = pGM de cette orbite ;
2) la durée T de ce voyage interplanétaire Terre-Mars ;
3) l'augmentation de vitesse qu'il faut communiquer au vaisseau
a) lors du lancement depuis la terre ;
€ arrivée sur la planète mars ;
b) lors de son
4) la position relative angulaire que doit avoir la planète Mars par rapport à la Terre à l'instant où le vaisseau quitte la terre.
3/2
π ⎛ R1 + R2 ⎞
RR
R2 − R1
2R1R2
;p=
; C = 2GM 1 2 ; T =
⎜
⎟ ;
R1 + R2
R2 + R1
R1 + R2
GM ⎝ 2 ⎠
⎛
⎞
⎛
⎞
GM
2R2
GM
2R1
−1⎟⎟ ; ΔvM = −1⎟⎟ ; 45°.
⎜⎜
⎜⎜
R1 ⎝ R1 + R2
R2 ⎝ R1 + R2
⎠
⎠
€
€
€
Réponse : e =
ΔvT =
€
8
-1
€ II La terre décrit autour du soleil
€ de centre S une orbite pratiquement circulaire de rayon a = 1,5.10 km, à la vitesse u = 30 km.s .
En 1843, une comète (C) est passée extrêmement près du soleil S : distance au périhélie SP = d = 6,1.10-3 a.
1) En considérant que l'orbite de (C) est parabolique, calculer la vitesse maximale de la comète.
2) Des mesures précises ont montré que l'orbite de (C) était en fait une ellipse d'excentricité e = 1 - x avec x = 9,4.10-5 (on a donc
x « 1).
Jusqu'à quelle distance D la comète va t-elle s'éloigner du soleil ? Calculer sa vitesse à cette distance.
En quelle année reviendra-t-elle ?
Réponse : 543 km.s-1; D = 1,9.1010 km; 25,5 m.s-1; 2364.
III Satellite Hipparcos
Le satellite Hipparcos lancé le 8 août 1987 était constitué principalement d'un télescope de 30 cm de diamètre. Celui-ci a permis
d'établir un catalogue des positions, distances et éclats de plus de 118 000 étoiles avec une précision jamais atteinte.
Ce satellite devait être placé sur une orbite géostationnaire à une altitude H = 36 000 km. Un problème de mise à feu du moteur
d'apogée a laissé Hipparcos sur son orbite de transfert, son altitude variant entre h et H. Après utilisation des moteurs de
positionnement, l'altitude minimale a été portée à h = 500 km. Une programmation du satellite a permis de s'affranchir des problèmes
liés à cette orbite.
Au cours d'une révolution, il passe dans la ceinture de Van Hallen. On supposera que cette ceinture est comprise entre deux sphères de
rayon r1 = 8 400 km et r2 = 28 000 km et de centre celui de la Terre. La ceinture de Van Hallen est constituée de particules chargées
piégées dans le champ magnétique terrestre. Ces particules aveuglent les détecteurs d'Hipparcos interrompant les mesures des positions
des étoiles. Il est cependant utilisable à 65% .
On assimile la Terre à une sphère de centre O, de rayon R = 6 400 km et de masse M et le satellite à un point matériel (S, m). On
suppose le référentiel géocentrique Rgc galiléen. La période de rotation de la Terre dans ce référentiel appelée jour sidéral vaut
T = 86 164 s. On note G la constante de gravitation, sa valeur numérique n'est pas utile dans ce problème.
2014 – 2015
1/6
PCSI 2
Forces centrales conservatives
A Moment cinétique
1) Montrer que le moment cinétique L en O du satellite est une constante du mouvement.
2) On utilise les coordonnées cylindriques (O, ur ,uθ ,uz ) avec uz tel que L = L uz .
dθ
Montrer que le mouvement est plan et exprimer r2
en fonction de L et m.
€
dt
Quelle est le nom de cette grandeur ?
€
€
€
€
B Vecteur excentricité
€
L
V est une constante du mouvement ( V étant la vitesse du satellite).
GmM
2) On choisit l'origine de l'angle polaire pour avoir θ = ( e , uθ ).
p
Montrer
de la trajectoire peut se mettre sous€la forme : r(θ) =
où e est la norme de e .
€ que
€ l'équation
1−
e
cos θ
€
En déduire la trajectoire du satellite.
€ €
1) Montrer que e = uθ -
C Trajectoire d'Hipparcos
€
€
1) Exprimer et calculer e et p en fonction de h, H et R.
2) Exprimer et calculer le demi-grand axe a de la trajectoire.
D Période d'Hipparcos
1) Enoncer sans démonstration la troisième loi de Képler.
2) Exprimer la période Th de révolution d'Hipparcos en fonction de T, R, H et h. Calculer Th en heure.
E Ceinture de Van Hallen
1) Déterminer les valeurs numériques des angles θ1, θ2 d'entrée et de sortie de la ceinture de Van Hallen du satellite.
On donnera les valeurs comprises entre 0° et 180°.
2) Représenter sur un schéma clair la trajectoire du satellite et l'aire A balayée par OS lors d'un passage dans la ceinture de Van
Hallen.
Pour la question suivante, on prendra une valeur approchée de A = 200.106 km2.
3) Déterminer le rapport ρ = to/Th en fonction de A et Ae (aire de l'ellipse)€où to est la durée totale d'inactivité d'Hipparcos sur une
période. Commenter.
πp 2
On donne l'aire de l'ellipse : Ae =
.
3/2
1− e 2
(
)
3/2
⎛
H + h ⎞
R
+
( R + h)( R + H ) ; a = R + H + h ; T = T ⎜
H−h
2 ⎟ ; ρ = 2 A .
Réponse : e =
;€p = 2
⎜
⎟
h
Ae
2R + H + h
2R + H + h
2
⎜ R + H ⎟
⎝
⎠
€
€ - Points de libration €
€
IV Points d’équigravité
€
La terre, de masse M et de centre de masse T , décrit autour du Soleil (masse kM et centre de masse S ) une orbite pratiquement
1
circulaire de rayon a . On donne a = 1,5.10 8 km , G = 6,67.10−11 U.S.I constante de gravitation universelle et k = .10 6 .
3
m
E
TS
x
=
TE
a
=
TS .
On notera €x la distance à la Terre d’un
point
matériel
de
masse
situé
sur
l’axe
;
on
a
donc
et
€
€
€
On considère l’action commune de la Terre et du Soleil sur un point matériel E .
€
€
€
€
1) Point(s) d’équigravité
€
€
€
€
€
€
a) Déterminer en fonction de a et k , la (ou les) position(s) x eq du ou des points d’équigravité situés sur l’axe TS où la
€
résultante des forces de gravitation est nulle.
b) Application(s) numérique(s) de x eq .
€
€
€
€
2014 – 2015
2/6
€
PCSI 2
Forces centrales conservatives
2) Points de libration
On considère dans cette question l’action commune de la Terre et du Soleil sur un point matériel E .
On appelle point de libration un lieu de l’espace où une sonde placée à cet endroit accompagnerait constamment la Terre dans son
mouvement de rotation autour du Soleil. On aurait ainsi à chaque instant l’alignement de la Terre, du Soleil et de la sonde. On
admet qu’il existe deux points de libration P1 (x1 ) et P2 (x 2 ) .
€
a) Etablir que les positions de ces deux points sont telles que :
1
a2
x
1
a2
x
et
−
= 1− 1
+
= 1+ 2
2
2
2
2
a
a
⎛ x 2 ⎞
kx 2
€⎛ x1 ⎞ € kx1
⎜1− ⎟
⎜1 + ⎟
⎝
⎝
a ⎠
a ⎠
x1
x2
b) En admettant que
<< 1 et
<< 1 , en déduire les distances TP1 et TP2 en fonction de a et de k .
a
a
Applications numériques.
€
€
a
k −1
Réponse : x eq = €
.
a ; x€
1 ≈ x2 ≈
1/ 3
k −1
( 3k)
€
€
V
€ Interaction nucléaire entre proton et neutron
€ Yukawa sur les forces nucléaires, l’interaction attractive entre un
Dans la théorie de
neutron et un proton est caractérisée par l’énergie potentielle suivante, fonction de la
distance r qui sépare les deux particules :
K −r / a
Ep(r) =
e
r
a étant une distance caractéristique et K une constante négative d’interaction.
1) Donner l’expression de la force correspondante.
2) Donner l’expression de l’énergie potentielle effective Ep,ef en fonction de la masse
µ du système et de son moment cinétique L dans €le référentiel du centre de masse.
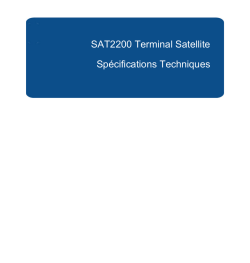
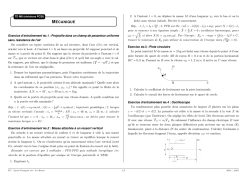
Le graphe Ep,ef(r) a l’allure représentée sur la figure ci-contre. Discuter les différents
mouvements possibles suivant la valeur de l’énergie E = Ec + Ep. Quelle est
l’équation qui relie les constantes L, a, µ, K à la valeur rm pour laquelle la dérivée
dEp,ef/dr est nulle ?
3) Calculer le moment cinétique L et l’énergie E dans le cas d’un mouvement
circulaire de rayon ro.
! K ⎛ r ⎞
⎛ rm ⎞ −rm / a L2
!
1 L2
Réponse : F = 2 ⎜1+ ⎟e−r / a er ; E p,ef =
;
+
E
K
+
=0 ;
⎜1 + ⎟e
p
⎝
2 µr 2
a ⎠
µrm
r ⎝ a ⎠
⎛ r ⎞
K ⎛ ro ⎞ −ro / a
L = −µKro ⎜1+ o ⎟e−ro / a ; E =
.
⎜1− ⎟e
⎝ a ⎠
2ro ⎝
a ⎠
€
€
€
€
Ep,ef
E1
ro
0
r1
r
Eo
€
VI Satellite artificiel ; sonde spatiale.
€
€
Données numériques :
Constante universelle de gravitation : G = 6,67.10-11 u.s.i.
Masse de la Terre : M = 5,97.1024 kg
Rayon de la Terre : R = 6,34.106 m
23
Masse de Mars : Mo = 6,42.10 kg
Rayon de Mars : Ro = 3,40.106 m
I - Propriétés générales de la trajectoire
Un satellite artificiel, S, assimilable à point matériel de masse m, évolue librement à grande distance de la Terre. La Terre est
considérée comme un corps immobile, rigoureusement sphérique et homogène,
de rayon R, de masse M et de centre O.
!
!
! dr
On désigne par r (t) = OS le vecteur position du satellite et par v =
son vecteur vitesse. A l'instant initial t = 0, le satellite se trouve
dt
!
!
dans la position r0 , animé de la vitesse v 0 , non radiale.
L'influence de la Lune, du Soleil, des autres planètes, ainsi que celle de l'atmosphère sont ignorées. On étudie la situation pour t > 0.
€
€!
1.1. Donner l'expression vectorielle du champ de force F (r) auquel est soumis le satellite.
!
€
€
On désignera par G la constante de gravitation universelle et par u r le vecteur unitaire radial.
2014 – 2015
€
3/6
€
PCSI 2
Forces centrales conservatives
S'agit-il d'un champ de force central ? Expliquer.
!
1.2. Définir le vecteur moment cinétique L0 du satellite, par rapport au centre O.
!
1.3. Montrer que, quel que soit t ≥ 0 , le moment cinétique L0 du satellite est constant, égal à une valeur à expliciter littéralement.
1.4. Justifier le fait que la trajectoire suivie par le satellite, pour t ≥ 0, est entièrement contenue dans un plan fixe P, que l'on précisera.
€
€
Il - Etude du mouvement plan. Aspects dynamiques et énergie
€
On reprend les hypothèses de la section I ci-dessus, en se plaçant dans le plan P de la trajectoire. Ce plan est rapporté aux coordonnées
{
}
!
!
polaires (r,θ ) de centre O et de base locale u r ,uθ . u r et uθ sont respectivement le vecteur unitaire radial et le vecteur unitaire
orthoradial.
au satellite, !conduit à déduire une relation de la forme : r nθ˙ = C = cte .
€2.1. Montrer que théorème du moment
€ appliqué
€
€ cinétique,
Déterminer l'exposant n, et relier la constante C au moment cinétique L0 du satellite par rapport au centre de la Terre et à sa masse m.
!
2.2. Exprimer l'aire, dA, balayée par le rayon-vecteur r durant l'intervalle de temps dt.
€
Montrer que l'aire A balayée par le rayon-vecteur durant un intervalle de temps Δt = t 2 − t1 > 0 est proportionnelle à Δt , le facteur
€
de proportionnalité α étant le même quel que soit t1 ≥ 0 (seconde loi de Kepler). Pour cela, on identifiera le facteur α .
€
On note respectivement U(r) et K(r) l'énergie potentielle et l'énergie cinétique du satellite dans la position courante
€ r, et respectivement
€
U 0 et K 0 €
, ces mêmes énergies à l'instant initial.
€
€
2.3. En adoptant la convention U = 0 à l'infini, justifier physiquement le fait que l'énergie potentielle de gravitation U(r) est négative
quelle que soit la distance r, finie.
€ 2.4. Partant de la position r! , le satellite effectue un déplacement élémentaire dr! le long de sa trajectoire. Relier les variations dU(r) et
dK(r) de l'énergie potentielle
et cinétique observées au cours de ce déplacement.
€
De quelle propriété jouit la somme: E(r) = U(r) + K(r) ?
2.5. A quelle condition liant U 0 et K 0 , le satellite reste-t-il en orbite autour de la Terre (état lié) ? Quelle est alors la nature de la
€
€
trajectoire suivie par le satellite ? On donnera ces deux résultats sans les démontrer.
III - Satellite géostationnaire
€
€
La Terre tourne sur elle-même, autour de l’axe passant par ses pôles, à la vitesse angulaire Ω , avec une période correspondant par
définition au jour sidéral TS = 86164 s. On ne considère pas son mouvement de révolution autour du Soleil.
Le satellite évolue maintenant de façon géostationnaire (immobile pour un observateur terrestre), c'est-à-dire qu'il tourne de façon
synchrone avec la Terre sur une orbite circulaire de rayon
, située dans le plan équatorial.
€
L‘étude est menée dans le référentiel géocentrique.
3.1. En appliquant le principe fondamental de la dynamique au satellite, déterminer l'expression du rayon a1 de l'orbite
géostationnaire, en fonction de G, M et Ω . Calculer numériquement a1 et la vitesse v1 du satellite sur son orbite.
3.2. Déterminer l'expression de l'énergie potentielle de gravitation U(r) du satellite, lorsqu'il se situe à une distance r, quelconque, du
centre de la Terre. On exprimera U(r) en fonction de G, M, m et r, en retenant la condition : U = 0 à l'infini.
3.3. Exprimer l'énergie mécanique totale ET du satellite sur son orbite géostationnaire, en fonction de G, M, m€et a1 .
€ d'une base terrestre située sur l'équateur (Kourou [Guyane]).
3.4. Le satellite a été lancé à partir
Déterminer l'énergie minimale W L qu'il a fallu dépenser pour le placer sur orbite géostationnaire.
On ne tient pas compte ici des frottements dans l'atmosphère, pas plus que de l'énergie dépensée pour propulser la fusée porteuse, hors
€
€
satellite.
3.5. Exprimer la différence ΔW L entre l'énergie minimale de lancement sur orbite géostationnaire à partir d'une base équatoriale et à
€ à la latitude géographique λ ≠ 0 .
partir d'une base située
Est-il, sur le plan énergétique, préférable d'effectuer les lancements depuis la base de Kourou ( λ = 0 ) ou du Cap Canaveral [Floride] (
λ = 25° N ) ?
€
€IV Erreur de positionnement du satellite sur orbite
€
Selon le cas, des erreurs à la mise en position du satellite peuvent l’amener sur une trajectoire elliptique. L’équation polaire de la
p
trajectoire du satellite dans le cas général s’exprime par : r =
(on suppose l’origine des angle polaire θ convenablement
1 + e cos θ
choisie).
On montre que la valeur du paramètre p répond à : p = C²/GM où C est la constante des aires, G la constante universelle de gravitation
et M la masse du centre attractif.
€
2014 – 2015
4/6
PCSI 2
Forces centrales conservatives
4.1 Préciser les valeurs des paramètres p et e dans le cas étudié en III.
4.2 La mise en orbite du satellite est imparfaite. Il est placé à l’altitude h = a1 – R, mais avec une vitesse de module v’1 légèrement plus
grande que v1, de direction orthoradiale. Représenter schématiquement la trajectoire obtenue. Quelles sont les nouvelles valeurs C’, p’
et e’ prises par C, p et e ?
Calculer numériquement les valeurs extrémales rmin et rmax prise par la distance r entre le satellite et le centre de la Terre pour v’1 = 3300
m.s-1.
4.3 L’énergie mécanique E du satellite a une expression analogue à celle d’un satellite circulaire, en remplaçant dans cette expression
le rayon par le demi grand axe a’1 de la trajectoire. En déduire la valeur de a’1.
4.4 Etablir la troisième loi de Kepler pour un satellite de période T situé sur une trajectoire circulaire de rayon R.
On admet que pour le satellite situé sur l’orbite elliptique, la troisième loi de Kepler reste valide en adaptant son écriture selon
3
l’expression : a'1 = GM où T’ est la période orbitale et a’1 est le demi grand axe de la trajectoire.
T ' 4 π Comparer la période effective T’ du satellite à la période d’un satellite circulaire géostationnaire.
V Sonde spatiale
€
La sonde spatiale envisagée est conçue pour voyager à travers l’ensemble du système solaire. Elle doit pouvoir approcher
successivement les différentes planètes situées au delà de l’orbite terrestre.
5.1 Une sonde spatiale est dans un premier temps satellisée sur une orbite circulaire basse autour de la Terre. On souhaite l’envoyer
dans l’espace, en la libérant de l’attraction terrestre. La mise à feu d’un étage de propulsion l’amène rapidement à la vitesse de
libération vlib. Calculer la valeur de vlib ainsi que l’énergie Wlib qui doit lui être apportée à partir de l’orbite basse.
5.2 L’énergie effectivement fournie excède Wlib d’une quantité ΔE.
Justifier que ΔE = 1 m sv s où ms est la masse de la sonde et vs sa vitesse dans le référentiel géocentrique, quand elle se trouve en phase
2
d’approche de la planète Mars.
5.3 Le plan de vol prévoit une approche de Mars, puis une poursuite du voyage en direction de Jupiter. La disposition des planètes
impose
€ alors de dévier la trajectoire de la sonde. Afin d’économiser tout moyen de propulsion, la sonde va utiliser le champ de
gravitation martien pour cette opération.
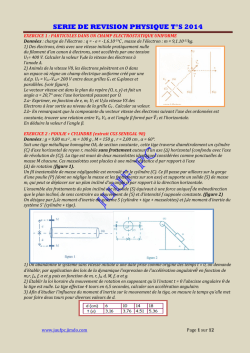
La suite de l’étude est conduite dans le référentiel planéto-centrique RM centré sur
Mars.
Dans la première partie du mouvement, la sonde est suffisamment éloignée de
Mars pour que l’on considère son mouvement comme rectiligne et uniforme,
l’interaction de gravitation avec la planète étant infime.
On note va la vitesse d’approche de la sonde dans ce référentiel. On note b la
distance entre la droite-support de la vitesse dans la phase d’approche et le centre
de la planète, nommée paramètre d’impact.
5.3.1 Quelle sera la nature de la trajectoire suivie par la sonde à proximité de Mars ? Justifier.
5.3.2 Quelle est l’énergie Ea de la sonde dans le référentiel RM ? Calculer la valeur Ca de la constante des aires pour la sonde.
pa
La trajectoire répond à l’équation polaire : r =
avec pa = Ca²/(GMo).
1+ ea cos θ
Déterminer pa, puis ea, en fonction de b, va, G, Mo.
GM 0 m 2
ea − 1 .
On donne la relation entre l’énergie Ea du mobile, le paramètre pa et l’excentricité ea de la trajectoire : Ea =
pa
€
5.33 Etablir une condition sur b pour que la trajectoire de la sonde subisse en fin de processus une déviation de 10° par rapport à sa
direction incidente.
5.34 A quelle altitude minimale ha la sonde va-t-elle survoler la surface de Mars dans ces conditions? On donne va = 1,00.104 m/s.
€
(
)
! !
⎛ GM ⎞1/ 3
!
GMm
GMm
Réponse : L0 = r0 ∧ mv 0 ; C = L0/m ; α = C/2 ; dU = - dK ; a1 = ⎜ 2 ⎟ ; U (r) = −
; ET = −
;
⎝ Ω ⎠
2a1
r
⎛ 1
1
R 2 ⎞
a 2 v' 2
p'
GMa1
1
W L = GMm⎜ −
− 3 ⎟ ; ΔW L = ma12Ω 2 sin 2 λ ; e = 0 et p = a1 ; C’ = a1v’1 ; p' = 1 1 ; e' = − 1 ; a'1 =
;
R
2a
a
GM
2
2a1 ⎠
2GM − a1v'12
⎝
1
1
€
€2
€
€
bv a )
b 2 v a4
(
2GM
GMm
− 1 ; e = 11,5 ; b = 4,91.106 m ; p = 5,62.107 m.
T’ = 1,29 TS ; v lib =
; W lib =
; Ca = bva ; pa =
; ea =
GM 0
R
2R
G 2M 2
€
€
€
€
€
2014 – 2015
€
€
€
5/6
PCSI 2
Forces centrales conservatives
VII Cosmologie : orbitogramme de la Villette
1) Etude cinématique
! ! !
On considère un référentiel galiléen associé au repère orthonormé 0, ex , ey , ez , l’axe Oz est vertical ascendant. La position d’un
(
)
point matériel M sera définie par ses coordonnées cylindriques, r (r > 0), θ et z.
!
!
!
!
On notera respectivement er et eθ les vecteurs unitaires déduits de ex et ey par rotation d’angle θ autour de 0z.
a) Exprimer OM dans la! base cylindrique.
€
b) En déduire la vitesse v (M ) dans cette même base.
!
!
!
!
€ l’accélération
€
€ :€
a (M ) = ˙r˙ − rθ˙ 2 er + 2r˙θ˙ + rθ˙˙ eθ + ˙z˙ez .
c) Montrer que
peut se mettre sous la forme
€
!!
1 d 2˙
d) Montrer que a.eθ =
r θ .
€
r dt
(
) (
)
( )
€
€
2) Etude dynamique et énergétique
On étudie le mouvement d’une bille d’acier M, de masse m, assimilée à un point matériel sur une surface de révolution. La surface
k
sur laquelle roule la bille est engendrée par la révolution d’une portion d’hyperbole z = − avec k > 0. La bille se comporte sur
r
cette surface comme un corps céleste soumis à une force de gravitation.
a) Rappeler l’expression de la force de gravitation exercée par un point M1 de masse m1 sur un point M2 de masse m2. On notera
! MM
€ de M1 vers M2.
r = M1M2 la distance entre les points et u = 1 2 le vecteur unitaire orienté
r
b) Montrer que cette force dérive d’une énergie potentielle dont on établira l’expression. On choisira l’origine de l’énergie
potentielle lorsque r tend vers l’infini.
On revient à l’étude de la bille.
!
!
!
!
€
On néglige les frottements. La réaction normale du support sera notée : RN = Rrer + Rθ eθ + Rzez .
c) Justifier sans calcul que Rθ = 0 .
d) Faire le bilan des forces s’exerçant sur la bille. Préciser si ces forces dérivent d’une énergie potentielle. Dans l’affirmative,
préciser l’expression de l’énergie potentielle associée en fonction de la variable r uniquement. On choisira l’origine de l’énergie
€
potentielle lorsque r tend vers l’infini.
€
e) Ecrire le principe fondamental de la dynamique et faire la projection dans la base cylindrique. En déduire que la quantité r 2θ˙
est une constante notée C.
1
1 C 2 mgk
f) Exprimer l’énergie mécanique sous la forme : Em = mα (r) r˙ 2 + m 2 −
. Préciser α(r) en fonction de k et r. Que
2
2 r
r
€
peut-on dire de l’énergie mécanique.
1 C 2 mgk
g) On peut donc définir une énergie potentielle effective E peff (r) = m 2 −
. Tracer l’allure de la courbe Epeff(r).
2 r
r
€
En fonction de la valeur de l’énergie mécanique initiale du système Eo, discuter le caractère lié ou libre du mouvement.
h) Pour quelle valeur de r a-t-on un mouvement circulaire ? On exprimera le rayon rc du mouvement circulaire en fonction de C,
g et k.
!
!
i) On lance la bille d’une distance ro avec une€vitesse v o . Préciser la direction et le module de v o pour avoir un mouvement
circulaire.
Réponse : E p = −
C2
k2
mgk
; α (r) = 1+ 4 ; rc =
; v€
o =
gk
r
r
2014 – 2015
€
gk
.
ro
€
6/6
€
€
€
© Copyright 2026 Paperzz