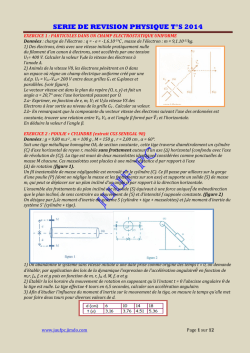
CPGE / Sciences Industrielles pour l’Ingénieur(e) TD16_08 LIGNE LG37 Le système étudié est une dérouleuse de bobine sur laquelle est stockée de la tôle en acier. Afin de faciliter leurs manipulations, la dernière spire des bobines de tôles est soudée. Après chargement de la bobine sur le poste d’entrée et positionnement de l’ensemble mobile, la première opération consiste à venir casser le cordon de soudure qui maintient la dernière couche enroulée. M Salette- Lycée Brizeux- Quimper Figure 1 : Vue du bras porte-rouleau Comme le montre la figure, les deux vérins hydrauliques (VH1) placés de part et d'autre du mécanisme, animent en rotation le bras (2) équipé de la tête (3) permettant le contact entre les rouleaux (4 et 5) et la bobine (6). L’outil, solidaire du coude (7), est actionné par l’unique vérin hydraulique (VH2). L'opérateur commande la rotation lente de la bobine de façon à amener le cordon de soudure en contact avec l'extrémité de l'outil. Ce dernier permet ainsi de casser le cordon de soudure qui maintenait la tôle enroulée. Durant toute cette phase, les vérins hydrauliques (VH1) maintiennent les rouleaux (4 et 5) en contact avec la bobine Ils appliquent ainsi un effort presseur sur la bobine évitant le déroulement spontané de la première spire une fois le cordon de soudure cassé. Les figures page suivante montrent schématiquement les deux configurations possibles du mécanisme sans contact ou en contact entre les rouleaux et la bobine. On a volontairement omis de représenter les vérins hydrauliques (VH1 et VH2) car ils n’interviennent pas dans le modèle cinématique. : TD16_08 ligne LG.docCréé le 14/10/2014 – Page 1 sur 4 CPGE / Sciences Industrielles pour l’Ingénieur(e) TD16_08 Figure 2 : Configuration sans contact Figure 3 : Configuration avec contact 1En utilisant la figure schématique 2, établir le graphe de structure dans la configuration « sans contact ». On prendra soin de faire apparaître toutes les liaisons (y compris celles en parallèle). On adopte la convention d'écriture suivante: Lij désigne la liaison entre i et j. 2-. Déterminer le degré de mobilité total m = mu + mi de cette chaîne complète dans cette configuration. Quel est alors le degré h d'hyperstatisme ? 3-. Déterminer par la méthode cinématique, les liaisons équivalentes existant entre le support (1) et le bras (2), la tête (3) et le rouleau (4) et la tête (3) et le rouleau (5). 4-. Pour chacune des liaisons, donner un modèle cinématique à deux liaisons qui soit équivalent et isostatique. On proposera une solution sous la forme d'un schéma cinématique. : TD16_08 ligne LG.docCréé le 14/10/2014 – Page 2 sur 4 CPGE / Sciences Industrielles pour l’Ingénieur(e) TD16_08 L'étude préliminaire se poursuit en ramenant le système dans le plan médian vertical (Po, voir Figures 2 et 3). Les deux figures 4 et 5 représentent les schémas cinématiques minimaux pour les deux configurations où l’on a remplacé les liaisons en parallèle par leur liaison équivalente. Remarque importante On ne fait, pour l'instant, aucune hypothèse de réduction du problème à un problème plan. En conséquence, les figures proposées ne sont que des vues de face d'un schéma cinématique spatial. (2) (2) (3) y (4) (3) (4) (5) x z (6) (5) (6) (1) Figure 4 Configuration sans contact (1) Figure 5 Configuration avec contact 5Quelle est la nature géométrique du contact entre chacun des rouleaux (4 et 5) et la bobine (6)? En déduire le nom de la liaison cinématique correspondante. Proposer un paramétrage géométrique de cette liaison sous la forme d’un schéma. Dans la configuration "avec contact", on admet que la mobilité utile de la chaîne est nulle et que sa mobilité interne est de 3. 6Préciser quelles sont ces mobilités internes. Déterminer le degré d'hyperstatisme de la chaîne complexe toujours considérée comme spatiale. 7-. Quelles sont les conséquences cinématiques de cet hyperstatisme pour la nature du contact entre rouleaux et bobine? 8-. Proposer une modification simple du mécanisme afin de le rendre isostatique dans le cas avec contact. La ligne de production est capable de conditionner des bobines d'un diamètre minimum de 900 mm. Lors de la phase de chargement d'une bobine, le bras (2) est maintenu relevé en position haute. Dans cette configuration, les vérins VH1 sont en position "sortie maximum" (soit AB = 1815 mm ). On cherche à vérifier que la course disponible (800 mm pour ce modèle de vérin) est suffisante pour répondre au cahier des charges. Figure 6 Paramétrage de la configuration avec contact : TD16_08 ligne LG.docCréé le 14/10/2014 – Page 3 sur 4 CPGE / Sciences Industrielles pour l’Ingénieur(e) TD16_08 9- A partir du paramétrage proposé sur la figure 6, déterminer littéralement la distance d en fonction de e, L, r et R. Faire l'application numérique pour une bobine de diamètre 900 mm. La figure 7 représente la position haute du bras (VH1 en position "sortie maximum"). 10- Par une construction graphique, compléter la figure 7 en matérialisant la position du bras (2) lors du contact avec une bobine de diamètre 900 mm. On fera apparaître les trajectoires des points remarquables H 2 , B2 dans R1 . En déduire, par mesure sur votre construction, la course du vérin VH1 permettant de passer d'une configuration haute à basse. L’actionneur est-il correctement dimensionné ? figure 7 : TD16_08 ligne LG.docCréé le 14/10/2014 – Page 4 sur 4
© Copyright 2026 Paperzz