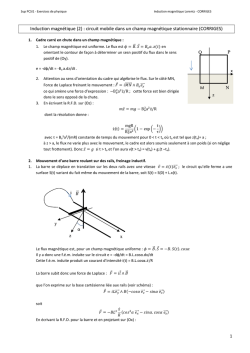
Les applications Exercice 5 La revanche du rail de Laplace incliné ! Une tige conductrice horizontale de masse m et de résistance électrique r peut glisser sans frottements sur un rail formé de deux barres métalliques parallèles, AD et A’D’. Distantes de l et faisant chacune un angle α avec l'horizontale, les deux barres sont reliées à un résistor de résistance R à leurs extrémités D et D’. La résistance des barres du rail est négligeable devant R. On suppose que le seul mouvement possible de la tige est une translation parallèlement au rail et on note M et N ses points de contact sur les barres. L’ensemble du rail et de la tige est plongé dans un champ magnétique uniforme, vertical descendant, de norme B0. Étudier le mouvement de la tige lorsqu’elle est posée sur le rail à une hauteur h au-dessus du sol (position CC’), puis lâchée sans vitesse initiale. L’exercice n’est pas guidé mais nous allons le résoudre en utilisant la méthode 59. Effectuons une analyse qualitative du mouvement : après avoir été lâchée sans vitesse initiale, la tige entame une translation vers DD’ sous l’effet de son poids. Or, cette tige forme un circuit fermé avec le résistor et les portions ND’ et MD du rail. Comme son mouvement entraine une variation de l’aire de la surface Σ s’appuyant sur le contour (C) de ce circuit, un phénomène d’induction apparait et un courant induit i se met donc à circuler. D’après la loi de Lenz, ce courant doit s’opposer à la cause de l’induction, c’est-à-dire au mouvement de la tige : il doit donc être dirigé de M vers N afin que les actions de Laplace subies par la tige exercent un freinage. Afin d’effectuer une étude quantitative, paramétrons le dispositif. Le mouvement étant une translation le long du rail, installons un repère cartésien (OXYZ) défini comme suit : • O est au milieu de [CC’], confondu avec la position initiale du barycentre G de la tige ; • (OX) est colinéaire aux barres rail, dirigé vers DD’ ; • (OY) est colinéaire à la tige, dirigé de C vers C’ ; • (OZ) est enfin choisi pour obtenir un repère direct. Avec ce paramétrage (figure ci-contre), le vecteur position de G s'écrit simplement : G G rG = X (t ) eX avec X 0 = 0 et X 0 = 0 En revanche, le champ magnétique doit s’écrire : G G G B = −B0 cos α eZ + B0 sin α eX 1176 ∙ Magnétisme et Induction 28 Achevons le paramétrage en orientant le contour (C) du circuit. Compte tenu de la géométrie du problème et du choix des axes, une orientation directe de (C) par rapport à (OZ) conduit à une orientation de i de N vers M le long de la tige, c’est-à-dire à contre sens de l’axe (OY). Bien que ce choix soit possible, nous allons lui préférer l'orientation opposée, c’est-à-dire un courant i algébriquement dirigé de M vers N le long de la G G tige. L’orientation de (C) est alors indirecte par rapport à (OZ) et la normale à la surface Σ est donc n = −eZ (sauf au voisinage du résistor…). Il nous faut maintenant établir le système d’équations couplées en i(t) et X(t) régissant le dispositif. Nous allons tout d'abord déterminer le flux instantané Φ(t) à travers Σ et en déduire la f.é.m. induite e. Pour évaluer Φ(t), introduisons le flux Φ0 que l’on obtiendrait pour une position CC’ de la tige, ainsi que l’aire S(t) = l X(t) balayée par la tige entre sa position initiale et l'instant t. Compte tenu de l’uniformité du champ magnétique dans la zone du rail où la tige se déplace, nous avons alors simplement : G G G G G Φ (t ) = Φ0 − B0 ⋅ S (t ) n → Φ (t ) = Φ0 − B0 (− cos α eZ + sin α eX ) ⋅ S (t )(−eZ ) → Φ (t ) = Φ0 − B0 cos α S (t ) → La loi de Faraday donne alors : e (t ) = − dΦ dt → Φ (t ) = Φ0 − B0 l cos α X (t ) e (t ) = B0 l cos α X (t ) Comme dans l'exemple de référence du § 2.1, la valeur exacte de Φ0 n'est pas connue et est même impossible à déterminer (le champ magnétique n'est pas uniforme à l’extérieur du rail et la surface est localement courbe au voisinage du résistor) ; toutefois, cette valeur est sans importance car, le champ étant stationnaire, elle est indépendante du temps et disparait donc à la dérivation. Représentons enfin le circuit électrique équivalent et appliquons-y la loi de mailles ; nous obtenons ainsi l'équation électrique régissant le dispositif : (R + r) i (t) = e (t) soit : (R + r) i (t) = B0 l cos α X (t) > 0 car X > 0 Cette équation montre donc que i(t) > 0, ce qui est conforme à notre prédiction qualitative basée sur la loi de Lenz ! Listons maintenant les actions subies par la tige ; il y a : • Le qui équivaut à une unique force verticale G poids, G P = mg appliquée au barycentre G. Sa direction étant la même que celle du champ magnétique, sa décomposition dans le repère (OXYZ) prend la même forme : G G G P = −mg cos α eZ + mg sin α eX • Les actions de contact sur le rail G enG M et N qui sont assimilables à deux forces F1 et F2 respectivement appliquées en M et N (les contacts sont ponctuels) et qui, en l’absence de frottements, sont orthogonales au rail, donc à l’axe (OX). Induction au sein d’un circuit mobile dans un champ magnétique stationnaire ∙ 1177 Les applications • Les actions de Laplace, de résultante : soit G FL = ⎛ ⎞ ⎜⎜ JJJJG G G G G ⎟⎟⎟ G ⎜ ⎟ ∫ i (t ) dlP ∧ B0 = i (t )×⎜⎜⎜ ∫ dlP ⎟⎟⎟ ∧ B0 = i (t ) MN ∧ B0 P ∈Tige ⎟⎟⎠ ⎜⎜⎝PP:∈MTige →N G G G G F L = i (t ) (l eY ) ∧ (−B0 cos α eZ + B0 sin α eX ) puis G G G F L = i (t ) l B0 (− cos α eX − sin α eZ ) L’équation mécanique s’obtient à partir du théorème du centre d’inertie appliqué à la tige et projeté sur l’axe (OX) : G G G G G G d 2 rG (t ) = − i (t ) l B cos α + mg sin α m 2 = F ext = F L + F1 + F2 + mg d’où, en projetant : m X 0 dt Puisque nous cherchons à caractériser le mouvement, éliminons i(t) de ce système afin d’obtenir une unique équation différentielle sur la position X(t) : B l cos α X (t ) De l’équation électrique nous tirons : i (t ) = 0 R+r 2 2 2 (t ) = − B0 l cos α X (t ) + mg sin α que nous injectons dans l’équation mécanique pour obtenir : m X R+r X(t) n’intervenant pas explicitement, il est judicieux de réécrire cette équation en faisant apparaitre directement la vitesse V (t ) = X (t ) , ce qui donne : B2 l 2 cos2 α V (t ) = g sin α − 0 V (t ) m (R + r ) ou encore Compte tenu des conditions initiales, il vient : 1 V (t ) + V (t ) = g sin α τ avec τ= m (R + r ) B02 l 2 cos2 α V (t ) = gτ sin α (1− e -t τ ) ⎯⎯ ⎯ → V∞ = gτ sin α tτ dont nous pouvons enfin déduire : ⎛t ⎞ X (t ) = V∞τ ⎜⎜ − 1+ e−t τ ⎟⎟⎟ ⎟⎠ ⎜⎝ τ Ces lois sont valables tant que la tige reste sur le rail, c’est-à-dire tant que X reste inférieur à h/sinα. Il nous reste à interpréter les résultats obtenus : • Remarquons tout d’abord qu’en l’absence de champ magnétique, l’équation différentielle s’écrit V = g sin α et prédit donc un mouvement uniformément accéléré où la vitesse V croit linéairement au cours du temps ; ce résultat est parfaitement normal pour un glissement sans frottement le long d’un plan incliné et est bien connu depuis 1604 grâce aux expériences de Galilée ! Conformément à l’intuition, le terme d’accélération (g sinα) diminue avec l’inclinaison α du rail et s’annule pour un rail horizontal (α = 0). • En comparaison, l’effet de l'induction apparait clairement comme un freinage, aussi bien dans l’équation différentielle où figure un terme d’amortissement (V/τ), que dans sa solution qui prédit l’existence d’une vitesse limite V∞ ; la loi de Lenz est donc bien vérifiée. • Analysons enfin le rôle joué par les différents paramètres du problème (m, R, B0, l, α). En dehors du terme d’accélération déjà mentionné, ces paramètres interviennent exclusivement à travers la durée τ, qui caractérise à elle seule la dynamique du système ; qualitativement, le freinage est d’autant plus efficace que τ est faible, puisque la valeur de la vitesse limite (gτ sinα) ainsi que la durée nécessaire pour atteindre cette vitesse (≈ 5τ) décroissent avec τ. Or, τ = m (R + r ) (B02 l 2 cos2 α ). Nous en déduisons que pour obtenir un freinage efficace (τ faible), il faut un champ magnétique intense (B0 élevé), une faible inclinaison du rail (cosα élevé) et un circuit de grande taille (l élevé), de faible résistance et de faible masse (R + r et m faibles). 1178 ∙ Magnétisme et Induction 28 Ceci est conforme aux propriétés des phénomènes d’induction : un champ intense et un circuit de grande taille dont la normale est peu inclinée par rapport au champ, permettent un flux magnétique élevé, donc une f.é.m. élevée ; une faible résistance permet alors, à f.é.m. fixée, d’obtenir un courant induit élevé, donc des forces de Laplace élevées ; enfin, une faible masse traduit une faible inertie, ce qui facilite le freinage. Exercice 6 Oscillations de deux tiges On considère deux tiges identiques, de masse m, susceptibles de glisser sans frottement sur un rail de Laplace de largeur l, ouvert à ses deux extrémités. On suppose que les seuls mouvements possibles de ces tiges sont des translations rectilignes parallèlement à la direction Ox du rail. Les deux tiges et le tronçon de rail situés entre les tiges forment un circuit fermé de résistance électrique R qui sera supposée constante quelle que soit la position des tiges. L’ensemble est plongé dans un champ magnétique uniforme et stationnaire, orienté selon la verticale ascendante, de norme B. Chacune des tiges est liée à un ressort de raideur k. La position de la tige n°1 (respectivement de la tige n°2) est repérée par son abscisse x1 (respectivement x2), comptée à partir de la position pour laquelle le ressort auquel elle est liée est au repos. À l’instant initial, on lâche les tiges sans vitesse depuis les abscisses x1 (0) = a > 0 et x2 (0) = 0. 1. Prévoir qualitativement le mouvement observé. 2. Écrire les équations électrique(s) et mécanique(s) régissant le circuit. 3. En déduire deux équations différentielles couplées vérifiées par les abscisses x1 et x2. On écrira ces équations en introduisant la pulsation propre des ressorts, qui sera notée ω0, ainsi qu’une durée τ caractéristique de la dissipation au sein du dispositif ; ω0 et τ seront exprimées en fonction des données. 4. Afin de découpler ces équations, on effectue leur somme et leur différence. Déduire de ce découplage les expressions asymptotiques de x1 et x2 , puis du courant i traversant le circuit, au bout d’un temps très long. 5. En effectuant un bilan de puissance, justifier sans calcul intégral l’égalité : ∞ 1 ∫ Ri dt = 4 ka 2 2 . t =0 1. La mise en mouvement de la tige n°1, sous l'effet de la force de rappel du ressort, modifie l’aire de la surface s’appuyant sur le circuit fermé délimité par les deux tiges et le tronçon de rail. D’après la loi de Faraday, il apparait une f.é.m. induite qui génère un courant dans ce circuit, et en particulier dans les tiges. Celles-ci se trouvent donc soumises à des actions de Laplace, avec comme conséquence la mise en mouvement de la tige n°2 qui était initialement immobile. Dès t = 0+, nous nous trouvons donc en présence d'un circuit dont deux parties sont mobiles. Induction au sein d’un circuit mobile dans un champ magnétique stationnaire ∙ 1179 Les applications D’après la loi de Lenz, les conséquences de l’induction doivent s’opposer aux causes du phénomène, c’est-àdire à la variation de flux magnétique liée au mouvement des tiges ; on peut donc s’attendre à un freinage de la première tige, celle-ci ayant initié l’induction (mais pas de la seconde qui était immobile au départ !) ; l'état final pourrait être un arrêt complet des deux tiges ou, solution moins intuitive, des oscillations parfaitement identiques des deux tiges, ne provoquant plus de variation du flux magnétique. 2. L’énoncé a introduit un axe (Ox) d’origine arbitraire, colinéaire aux barres du rail. Afin de paramétrer le circuit et de se conformer aux instructions de l’énoncé, définissons : • Deux points O1 et O2 correspondant aux positions de repos respectives des deux ressorts et servant d'origine aux abscisses des deux tiges ; nous noterons D la distance O1O2. • Un axe (Oz) vertical ascendant dirigé le champ G par G magnétique ; nous aurons ainsi : B = B eZ . • Une orientation du circuit, directe par rapport à (Oz) ; la surface Σ s’appuyant sur le contour du G G circuit aura ainsi pour normale n = eZ . Ces éléments nous permettent d'exprimer l'aire S(t) de Σ puis le flux magnétique Φ(t) à travers Σ : S (t ) = l ×(D + x 2 (t ) − x1 (t )) et G G Φ (t ) = B ⋅ S (t ) n = B l (D + x 2 (t ) − x1 (t )) La loi de Faraday nous donne alors la f.é.m. induite : e (t ) = − dΦ dt = B l ( x1 (t ) − x 2 (t )) Le circuit électrique équivalent étant composé uniquement de cette f.é.m. et de la résistance R de l’ensemble du dispositif, la loi des mailles conduit à : R i (t ) = e (t ) soit : R i (t ) = Bl ( x1 (t ) − x2 (t )) Il faut adjoindre à cette équation électrique deux équations mécaniques rendant compte du mouvement de chacune des deux tiges. Ces équations s’obtiennent par projection sur (Ox) du théorème du centre d’inertie appliqué à chacune des tiges. Du fait de la projection, ni le poids ni les actions de contact des tiges sur le rail n’interviennent ; seules restent les actions de Laplace ainsi que les forces de rappel des deux ressorts, dont les expressions sont simples grâce au choix des origines O1 et O2 (les allongements respectifs des ressorts sont simplement x1 et x2). En notant (M1 ; N1) et (M2 ; N2) les points de contacts des tiges sur le rail, nous obtenons : G JJJJJJG G JJJJJG G G G G G F2L = i (t ) l B ex sur la tige n°2 G G G G F1L = −i (t ) l B ex • Pour les actions de Laplace : F2L = i (t ) M2N2 ∧ B = i (t ) (l e y ) ∧ (B ez ) soit : G et F1L = i (t ) N1M1 ∧ B = i (t )(−l e y ) ∧ (B ez ) soit : sur la tige n°1 Ces expressions « sans intégrale » de la résultante des actions de Laplace sont les formules usuelles que l’on obtient systématiquement lorsque le champ magnétique est uniforme ; attention aux signes : la tige n°2 est orientée dans le sens de l'axe (Oy), de M2 vers N2, tandis que la tige n°1 est orientée à contre sens de l’axe (Oy), de N1 vers M1. 1180 ∙ Magnétisme et Induction 28 G G G G • Pour les forces de rappel : F2ressort = − k x2(t ) ex sur la tige n°2 et F1ressort = − k x1(t ) e x sur la tige n°1 ⎧ ⎪ m x1(t ) = − k x1(t ) − i (t ) l B ⎪ • Pour les principes fondamentaux projetés : ⎨ ⎪ m x2(t ) = − k x2(t ) + i (t ) l B ⎪ ⎪ ⎩ 3. Réécrivons les deux équations mécaniques en éliminant le courant i grâce à l’équation électrique et en divisant par m pour faire apparaitre la pulsation propre ω0 des ressorts : i (t ) = ⎧ ⎪ l 2B 2 ⎪ 1(t ) = − ω02 x1(t ) − x ⎪ ( x (t) − x2(t )) ⎪ k mR 1 → ⎪ où ω0 = ⎨ 2 2 ⎪ m l B ⎪ ⎪ x2(t ) = − ω02 x2(t ) + ( x (t ) − x2(t)) ⎪ mR 1 ⎪ ⎩ Bl ( x (t ) − x2(t )) R 1 Il apparait alors naturellement une durée caractéristique τ = ⎧ ⎪ ⎪ ⎪ ⎪ ⎪ ⎨ ⎪ ⎪ ⎪ ⎪ ⎪ ⎩ mR l 2B2 et le système demandé s'écrit : 1 ( x − x ) + ω02 x1 = 0 [équation 1] τ 1 2 1 x2 − ( x1− x2 ) + ω02 x2= 0 [équation 2] τ x1 + Ce système est effectivement couplé en x1 et x2 et ne peut être résolu tel quel. L’énoncé précise que τ doit être une durée caractéristique de la dissipation au sein du système. C'est bien le cas puisque cette durée est en préfacteur du terme d’ordre 1 de l’équation différentielle, dont nous savons qu’il représente un amortissement. Par ailleurs, τ est proportionnel à la résistance R du circuit, qui modélise la dissipation par effet Joule. ⎧ ⎪ x1 + x2 + ω02 ( x1 + x2 ) = 0 ⎪ ⎪ ⎪ 4. Les combinaisons linéaires [1+2] et [1-2] nous donnent : ⎨⎪ 2 x1 − x2 + ( x1− x 2 ) + ω02 ( x1 − x2 )= 0 ⎪ ⎪ τ ⎪ ⎩ Nous remarquons alors que x1 et x2 n'apparaissent plus que par leur somme et leur différence ; il est donc judicieux d'introduire deux nouvelles fonctions x1 = (s + d ) 2 et x2 = (s − d ) 2 , et de réécrire le système sous la forme : s + ω02 s = 0 et 2 d + d + ω02 d = 0 τ Nous obtenons ainsi deux équations différentielles indépendantes sur s(t) et d(t) que nous pouvons résoudre, avant de revenir à x1 et x2 en écrivant : x1 = (s + d ) 2 et x2 = (s − d ) 2 . En outre, le courant i(t) s’obtient alors très simplement en remarquant que : i (t ) = Bl × d (t ) . R Le « découplage » dont parle l'énoncé ne consiste donc pas à obtenir deux équations indépendantes sur x1 et x2 , mais sur s et d qui sont deux combinaisons linéaires de ces variables. Cette technique astucieuse peut être généralisée à tout système d'équations couplées symétrique par permutation des deux variables ; elle a déjà été utilisée dans l’exercice 6 du chapitre 2. Comme nous ne cherchons pas i, x1 et x2 à tout instant mais uniquement au bout d'un temps très long, il n’est pas utile de résoudre intégralement les deux équations précédentes. Il suffit de remarquer que l’équation sur d est celle d'un oscillateur harmonique amorti et conduit donc à une solution d(t) tendant vers 0 pour t ≫ τ (ce qui confirme au passage l’interprétation de τ). Ainsi, au bout d'un temps très long devant τ, nous aurons : x1∞ (t ) = x2∞ (t ) et i∞ (t ) = 0 . Induction au sein d’un circuit mobile dans un champ magnétique stationnaire ∙ 1181 Les applications Enfin, pour trouver explicitement x1∞ et x2∞, il suffit de résoudre l’équation différentielle en s qui est celle d’un oscillateur harmonique non amorti. Avec les conditions initiales de l’énoncé, nous obtenons : a s (t ) = a cos (ω0t ) ∀t , ce qui donne finalement : x1∞ (t ) = x 2∞ (t ) = cos (ω0t ) et i∞ (t ) = 0 pour t τ 2 La solution aux temps longs ne correspond donc pas l’immobilité totale du dispositif mais à un mouvement parfaitement identique des deux tiges sans variation de flux magnétique et sans courant induit. Nous retrouvons l'une des possibilités évoquées lors de notre analyse qualitative. 5. R i2 représente la puissance dissipée par effet Joule au sein du circuit électrique équivalent. Or, celui-ci étant composé uniquement de la f.é.m. e et de la résistance R, cette puissance dissipée est exactement la puissance e i fournie par la f.é.m. d’induction. Ceci peut se formaliser en écrivant : ∀t R i (t ) = e (t ) ×i ⎯⎯⎯ → R i 2 (t ) = e (t )× i (t ) Par ailleurs, nous savons que l’énergie fournie par la f.é.m. induite provient d'une conversion électromécanique et est exactement l’opposé de la puissance P L des actions de Laplace subies par les deux tiges. Ceci peut se formaliser en écrivant : ∀t e (t )× i (t ) = −P L (t ) = −(P1L (t ) + P2L (t )) Il faut donc faire un bilan d'énergie mécanique. Comme les actions de Laplace sont les seules actions non conservatives mises en jeu, le théorème de la puissance cinétique appliqué à l'ensemble des deux tiges nous montre que P L correspond exactement à la dérivée de l'énergie mécanique (énergie cinétique + énergie potentielle élastique) des deux tiges : PL = dEm avec Em = Ec ,1 + Ec ,2 + E pél,1 + E pél,2 dt Ainsi, ce bilan de puissance nous montre finalement que l’énergie totale dissipée par effet Joule au cours de l’évolution est l’exact opposé de la variation d’énergie mécanique du système : ∞ ∫ ∞ Ri2dt = t =0 ∫ t =0 ∞ ∞ dEm dt = Em −Em t =0 ∞ dt t =0 eidt = − ∫ P Ldt = − ∫ t =0 Or, à l’état initial, les deux tiges sont immobiles (Ec1 = Ec2 = 0) et le ressort n°2 est au repos (Ep2 = 0) ; l’énergie mécanique initiale du système se réduit donc à l'énergie potentielle élastique de la tige n°1 : 1 1 Em = E pél,1 = k x12(t = 0) = ka2 0 0 2 2 À l’état final, chaque tige se comporte comme un oscillateur harmonique non amorti d’amplitude a/2, dont l’énergie mécanique s’identifie à l'énergie potentielle élastique maximale ; nous avons ainsi : 2 Em Nous obtenons finalement : ∞ = E m ,1 ∞ + Em ,2 ∞ = ∞ ∫ Ri dt = E 2 t =0 1182 ∙ Magnétisme et Induction m t =0 −Em ∞ = 2 1 ⎛⎜ a ⎟⎞ 1 ⎛a⎞ 1 k ⎜ ⎟⎟ + k ⎜⎜ ⎟⎟⎟ = ka 2 ⎟ ⎟ ⎜ ⎜ 2 ⎝2⎠ 2 ⎝2⎠ 4 1 2 ka 4 . 28 Exercice 7 Étude fréquentielle de la réponse du haut-parleur Nous proposons de poursuivre ici l’étude du haut-parleur initiée dans l'exercice 4, au § 4.2 du cours. Nous vous renvoyons à l’énoncé de cet exercice ainsi qu’à la figure 23 pour la description du dispositif et les notations. Nous prendrons pour point de départ les résultats suivants, obtenus dans l’exercice 4 : Le système d’équations couplées vérifié par le courant i circulant dans le haut-parleur et par l'abscisse x de la tige mobile s’écrit : ⎧⎪ ⎪⎪(R + r ) i + L di = u − B l x 0 ⎪⎨ dt ⎪⎪ ⎪⎪⎩m x = i l B0 − hx − kx ⎡⎢équation 1⎤⎥ ⎣ ⎦ ⎡⎢équation 2⎤⎥ ⎣ ⎦ En régime permanent sinusoïdal, la vitesse de la tige et la f.é.m. du générateur alimentant le hautparleur vérifient, en notation complexe, la relation : l B0 v = u (B l )2 + (R + r + jLω) (h + j (mω − k ω)) 0 1. Pourquoi cette quantité peut-elle être a priori qualifiée de « fonction de transfert » du hautparleur ? Quelle caractéristique devrait avoir cette fonction de transfert pour que le haut-parleur émette un signal sonore reproduisant fidèlement le signal électrique d’entrée ? 2. En utilisant des valeurs typiques pour de petits haut-parleurs du commerce, nous avons tracé numériquement le diagramme de Bode du gain associé à cette fonction de transfert (figure a). Commentez l’allure de ce diagramme, en expliquant si elle vous semble conforme à ce que l’on attend d’un bon haut-parleur. 3. En réalité l’analyse de la fonction de transfert précédente n’est pas pertinente car, outre la conversion électromécanique, il faut prendre en compte l’efficacité du rayonnement de la membrane, qui dépend elle aussi de la fréquence. La courbe rouge de la figure b représente l’intensité de l’onde sonore émise par le haut-parleur précédent en fonction de la fréquence, pour une amplitude fixe de la f.é.m. d'alimentation ; elle résulte d'un calcul basé sur une modélisation simple du rayonnement de la membrane. 3.a. Commentez l’allure de ce nouveau diagramme en précisant, le cas échéant, dans quel domaine fréquentiel ce haut-parleur doit être utilisé. À votre avis, pourquoi les enceintes de bonne qualité sont-elles formées de plusieurs haut-parleurs différents ? 3.b. Les constructeurs choisissent volontairement les paramètres du dispositif afin d’obtenir une fréquence de résonance la plus basse possible. Quel est l’intérêt de ce choix ? Induction au sein d’un circuit mobile dans un champ magnétique stationnaire ∙ 1183 Les applications 4. La courbe bleue de la figure b correspond à un second haut-parleur de caractéristiques légèrement différentes du précédent. Comment se distinguent ces deux haut-parleurs ? Lequel vous semble le plus intéressant ? 5. On s'intéresse maintenant aux propriétés purement électrocinétiques du haut-parleur. 5.a. Montrer que le courant circulant dans le haut-parleur est lié à la f.é.m. par une relation de la forme : u = R + r + jLω + Z m (ω) où Zm sera exprimée en fonction des données. i 5.b. Proposer un nouveau schéma électrique équivalent pour le circuit. Comment expliquer que la quantité Zm soit appelée "impédance motionnelle" du haut-parleur ? 5.c. Existe-t-il une association de dipôles simples dont l'impédance équivalente serait Zm ? Conclure. 1. Il s’agit bien de la fonction de transfert de transfert du haut-parleur si on considère que le signal « d'entrée » de ce dispositif est la f.é.m. du générateur, et que le signal « de sortie » est la vitesse acquise par la tige et la membrane (ce dernier point est litigieux comme le montre la question 3, le signal de sortie étant en réalité le signal sonore rayonné par la membrane...). Pour que le haut-parleur émette une onde sonore reproduisant fidèlement le signal électrique d’entrée, il doit convertir chaque composante de Fourier du signal électrique avec approximativement le même gain ; le module de la fonction de transfert doit donc présenter de faibles variations avec la fréquence dans la gamme audible. En d'autres termes, le haut-parleur doit avoir une réponse spectrale « plate » (entre 20 Hz et 20 kHz). 2. Ce diagramme de Bode est à l'opposé de la réponse spectrale plate attendue pour un fonctionnement idéal du haut-parleur : le gain présente en effet une résonance assez piquée pour log f ≈ 1,5 , soit f ≈ 35 Hz , et est continument décroissant avec la fréquence au-dessus de 35 Hz, au minimum de 20 dB par décade. Le hautparleur favorisera donc a priori les sons les plus graves au détriment des plus aigus, avec une importance démesurée donnée aux très basses fréquences du fait de la résonance. Nous nous intéressons ici au seul le domaine audible, qui va de 20 Hz à 20 kHz et correspond donc aux abscisses comprises entre 1,3 et 4,3 sur le diagramme de Bode. 3.a. Ce diagramme montre qu’il existe un domaine spectral où l’intensité sonore rayonnée par le haut-parleur est indépendante de la fréquence de la f.é.m. d’alimentation ; cette propriété concerne les fréquences dont le log est compris entre 1,7 et 2,8 environ, donc l’intervalle spectral 50 Hz - 630 Hz. En d’autres termes, la réponse spectrale complète du haut- parleur, qui prend en compte à la fois la conversion électromécanique et le rayonnement de l’onde sonore par la membrane, est plate entre 50 Hz et 630 Hz. C’est donc dans ce domaine spectral que le haut-parleur doit être utilisé. Si nous comparons à l’ensemble du spectre audible (20 Hz - 20 kHz), nous constatons que l’intervalle 50 Hz 630 Hz correspond à la partie basse du spectre. Il s’agit donc manifestement d’un haut-parleur adapté au grave et au bas médium. Pour composer une enceinte restituant correctement le son sur l’ensemble du spectre audible, il faudra a minima lui adjoindre un second haut-parleur dont la gamme spectrale d’utilisation sera située dans le haut médium et dans l’aigu. 3.b. D'après le diagramme fourni, l’intensité sonore présente encore une résonance à une fréquence ≈ 35 Hz correspondant à l’extrême grave du spectre audible. Comme nous l’avons dit à la question 2, cette résonance peut être gênante car elle conduit à une amplification démesurée des sons les plus graves. En revanche, si le constructeur parvient à abaisser la fréquence de résonance jusqu’à une valeur inférieure à 20 Hz, c’est-à-dire à la sortir du spectre audible, le problème disparait totalement. 1184 ∙ Magnétisme et Induction 28 4. Le haut-parleur associé à la courbe bleue se différentie du précédent par : • une fréquence de résonance plus basse, approximativement située à log f ≈ 1,3 , soit f ≈ 20 Hz. • une réponse spectrale plate sur un ensemble de fréquences plus large, dont le log est compris entre 1,6 et 3,4 environ, ce qui correspond à l'intervalle spectral 40 Hz - 2,5 kHz. Il ne présente donc que des avantages par rapport au précédent ! ⎪⎧⎪(R + r + jLω) i = u − B0 l v ⎪ 5. a. En réécrivant les équations 1 et 2 en notation complexe, nous avons : ⎪⎨ ⎪⎪m jωv = i l B − hv − k v 0 ⎪⎪⎩ jω L'équation 2 donne : v = l B0 h + j (mω − k ω) (R + r + jLω) i = u − B0 l× ⎡1⎤ ⎣⎦ ⎡2 ⎤ ⎣ ⎦ i ; en injectant cette expression dans l'équation 1, il vient : l B0 h + j (mω − k ω) i soit ⎛ ⎞ l 2B02 ⎜ ⎟⎟⎟ i u = ⎜⎜R + r + jLω + ⎟ ⎜⎜⎝ h + j (mω − k ω)⎟⎠ l 2B02 u = R + r + jLω + Z m avec Z m = i h + j (mω − k ω) et le rapport demandé s’écrit donc bien : 5.b. Cette formule montre que, pour le générateur de f.é.m. u et de résistance R qui alimente le haut-parleur, tout se passe comme si le circuit électrique de ce haut-parleur était composé de la résistance r, de l’inductance L et d'un dipôle supplémentaire d'impédance Zm. Le circuit électrique équivalent devient donc celui de la figure ci-dessous. Avec ce nouveau point de vue, c’est le dipôle d'impédance Zm qui rend compte du phénomène d’induction ; il remplace donc la f.é.m. induite dans le modèle électrique équivalent. Comme les effets induits naissent du mouvement de la bobine et de la membrane, l’impédance qui leur est associée est logiquement appelée impédance motionnelle (liée au mouvement). 5.c. En réécrivant l’inverse de l'impédance sous la forme : 1 h m 1 Zm = l 2B02 +j l 2B02 ω+ j l 2B02 ω k nous reconnaissons une structure du type : 1 1 1 = + jCmω + Z m Rm jLmω Zm apparait donc comme le résultat de l’association parallèle de trois dipôles usuels : une résistance Rm , une inductance Lm et une capacité Cm vérifiant : 2 2 2 2 Rm = l B0 h ; Cm = m l B02 2 ; Lm = l B0 k Il existe donc un ultime modèle électrique équivalent pour le haut-parleur (figure ci-dessus). Induction au sein d’un circuit mobile dans un champ magnétique stationnaire ∙ 1185 Les applications Exercice 8 Étude quantitative d’un modèle simplifié de moteur à courant continu On modélise le rotor d'un moteur à courant continu par un disque de centre O et de rayon a, susceptible de tourner sur lui-même autour d’un axe vertical (Oz). On suppose que l’on peut négliger toute forme de frottement et on note J le moment d’inertie du rotor par rapport (Oz). Afin de produire la rotation, une tige métallique notée OA est fixée le long d'un rayon du rotor, dont la périphérie est également métallique, à l'exception d'une petite encoche diamétralement opposée au point A. Le rotor est alors alimenté en connectant sa périphérie ainsi que l'extrémité O de la tige à un circuit extérieur. Celui-ci est formé d’un générateur idéal de tension de f.é.m. constante U, d’un résistor de résistance électrique R et d’un interrupteur K. Les résistances électriques des parties conductrices du rotor sont supposées négligeables devant R. On note S le point du circuit extérieur, en contact avec la périphérie du rotor. Enfin, un dispositif non représenté plonge la tige OA dans un champ magnétique uniforme et stationnaire, vertical descendant dirigé à contre sens de l'axe (Oz) et de norme B0. Par soucis de simplification, on suppose que la périphérie du rotor se trouve à l'extérieur de la zone de champ ; en outre, le champ magnétique engendré par le courant d’intensité i parcourant le circuit est partout négligé devant B0. À t = 0, le rotor étant immobile dans une position quelconque, on ferme l'interrupteur. 1. Prévoir qualitativement le mouvement observé. 2. Établir l'équation mécanique du fonctionnement et une équation traduisant le bilan d’énergie mécanique. 3. Sans calculer explicitement la f.é.m. induite dans le circuit, établir l’équation électrique du fonctionnement, ainsi qu’une équation traduisant un bilan d'énergie électrique. 4. Déterminer l'expression de la f.é.m. induite en utilisant les bilans d'énergie précédents et la propriété de conversion électromécanique réalisée par le phénomène d'induction. 5. En déduire le courant i(t) parcourant le circuit et la vitesse angulaire ω(t) du rotor, puis commenter les résultats obtenus. On se demandera en particulier dans quelle mesure ce dispositif réalise un moteur de vitesse réglable ; enfin, on évaluera, en tours par minute, la vitesse atteinte lorsque : a = 20 cm, B0 = 1 T et U = 9 V. 6. Le modèle précédent prend-il en compte l'existence d'une charge entrainée par le moteur ? Comment faut-il modifier ce modèle, le cas échéant ? La vitesse de rotation dépend-elle de la charge du moteur ? 1. Lors de la fermeture de l’interrupteur, le générateur débite un courant électrique qui traverse la tige de O vers A. Compte tenu du champ magnétique vertical descendant, la tige subit alors des actions de Laplace orthoradiales qui la mettent en rotation dans le sens direct autour de (Oz), entrainant l’ensemble du rotor. Ce sens de rotation est l'opposé de celui obtenu lors de l’analyse du fonctionnement du moteur faite au § 4.3 du cours. C’est bien normal puisque le sens du champ a été inversé par rapport à la description faite en cours, alors que celui du courant électrique n’a pas été modifié. 1186 ∙ Magnétisme et Induction 28 Le mouvement de la tige conductrice dans le champ magnétique extérieur provoque alors un phénomène d’induction, c'est-à-dire l’apparition d'une f.é.m. induite dans le circuit. D’après la loi de Lenz, cette f.é.m. doit s’opposer aux causes de l’induction, donc à la rotation de la tige ; celle-ci étant due au courant débité par le générateur via les actions de Laplace, la f.é.m. induite doit par conséquent être en opposition sur le générateur et modérer ainsi la valeur du courant circulant dans le circuit. On peut donc imaginer qu’après un régime transitoire, le courant parcourant le circuit s’annule et le rotor tourne à vitesse angulaire constante. Cette analyse qualitative s'inspire fortement des résultats obtenus lors de l'étude du rail de Laplace avec générateur (§ 2.2), qui est en quelque sorte l’analogue « en translation » du moteur à courant continu. 2. Le rotor étant en rotation autour de (Oz), nous paramétrons sa position angulairement en posant : JJJG θ (t ) = Ox , OA (t ) ( ) L’équation mécanique demandée est donc une équation différentielle sur θ(t) ; pour l’obtenir, il faut évaluer le moment résultant par rapport à l'axe (Oz) des actions extérieures subies par le rotor puis appliquer le théorème du moment cinétique. Les actions sont les suivantes : • Le poids du rotor, qui équivaut à une unique force verticale et dont le moment par rapport à l’axe (Oz), luimême vertical, est nul ; • Les actions de la liaison pivot qui permet le mouvement de rotation ; en supposant cette liaison parfaite, le moment projeté sur (Oz) de ces actions est également nul ; • Les actions de contact au niveau des connexions en O et en S, qui sont négligées puisque l’énoncé précise que la rotation se fait sans aucun frottement ; • Les actions de Laplace sur la tige rectiligne, plongée dans JJJ G Gle champ magnétique uniforme, dont nous savons GL qu’elles sont assimilables à une force unique F = i OA ∧ B0 s’appliquant au milieu KG de la JJJGtigeG(ce résultat a été démontré au § 1.6 du chapitre 26) ; le moment en O de ces actions s'écrit donc : MOL = OK ∧ F L . En utilisant la base cylindrique d'axe (Oz), nous avons alors : JJJG G G G G F L = i OA ∧ B0 = i a er ∧ (−B0 e z ) JJJG G G soit puis : MOL = OK ∧ F L = 1 a er ∧ (i a B0 eθ ) = 1 i a2B0 e z G G G 2 2 G G F L = i a B0 eθ et G G 1 M(LOz ) = MOL ⋅ e z = i a 2B0 2 Un calcul direct redonne bien entendu le même résultat : G MOL = a JJJG G G G G G OP ∧ i dlP ∧ B0 = ∫ r er ∧ (i dr er ∧ (−B0 e z )) = P ∈OA r =0 G ∫ ( ) = dFL a = ∫ r =0 ⎛a G ⎟⎞ G ⎜ i B0 r dr ez = i B0 ⎜⎜ ∫ r dr ⎟⎟⎟ e z ⎟⎠ ⎜⎝ soit r =0 a G ∫ r e ∧ (i B r 0 G dr eθ ) r =0 G a2 G MOL = i B0 e 2 z Finalement, le théorème du moment cinétique par rapport à (Oz) nous donne : d Poids + M(Liaison + M(LOz ) (L ) = M ( Oz ) Oz ) N dt ( Oz ) =0 =0 soit 1 Jθ = i a 2B0 2 1 que nous pouvons également écrire à l’aide la vitesse angulaire ω = θ sous la forme : Jω = i a2B0 2 Enfin nous obtenons l’équation traduisant le bilan énergétique en multipliant par ω l’équation précédente ou, ce qui revient au même, en appliquant le théorème de l’énergie cinétique : 1 = M(LOz ) = i a2B0 Jω 2 ×ω ⎯⎯⎯ → d ⎛⎜ 1 2 ⎞⎟ ⎜ Jω ⎟⎟⎟ = dt ⎜⎝ 2 ⎠ 1 M(LOz )ω = i a2B0 ω ←⎯→ 2 dEc = PL dt puissance P L des actions de Laplace Induction au sein d’un circuit mobile dans un champ magnétique stationnaire ∙ 1187 Les applications Ce bilan signifie simplement que les actions de Laplace sont motrices et conduisent à une augmentation d’énergie cinétique de rotation du rotor. Dans ce chapitre, nous avons essentiellement effectué des bilans énergétiques sur des solides en translation à la vitesse vx le long d'un axe (Ox), pour lesquels l’énergie cinétique s'écrit EC = mvx2/2 et la puissance des actions de Laplace P L = F Lx × vx . Puisque nous étudions ici un solide en rotation autour d'un axe fixe (Oz) à la vitesse angulaire ω, il faut nous rappeler que dans cette configuration, l’énergie cinétique s’écrit EC = Jω2/2 et la puissance des actions de Laplace P L = M L(oz) × ω (revoyez le chapitre 17, §1.1 et 1.3). 3. D’après l'énoncé, le champ magnétique propre est négligé devant le champ extérieur, ce qui signifie que nous négligeons l’autoinduction. Ainsi, le circuit électrique équivalent est simplement donné par le schéma ci-contre, où e est la f.é.m. induite par le mouvement de la tige dans le champ extérieur. La loi des mailles donne donc : R i (t ) = U + e (t ) Enfin, c’est en multipliant cette équation électrique par i que nous obtenons l’équation traduisant le bilan d’énergie électrique : R i =U +e ×i ⎯⎯⎯ → R i 2 = Ui + ei ou encore : Ui = R i 2 − ei Ce bilan signifie que la puissance électrique U i fournie au circuit par le générateur est en partie dissipée par effet Joule (terme R i2) et en partie absorbée par la f.é.m. induite (terme − e i ) qui, conformément à la loi de Lenz, est en opposition sur le générateur. 4. Nous savons que l’induction réalise une conversion électromécanique : la puissance motrice fournie à la tige par les actions de Laplace est exactement la puissance électrique prélevée au circuit par la f.é.m. induite. Ceci se traduit par l’égalité : P L = − e i . Puisque nous avons calculé P L assez facilement, nous pouvons exploiter cette égalité pour en déduire e : 1 P L = i a2B0 ω = −ei 2 d′ où : 1 e = − a2B0 ω 2 L’application de loi de Faraday est ici un peu moins aisée du fait de la rotation, et surtout de la « discontinuité » de l’aire délimitée par le circuit lorsque l’encoche à la périphérie du rotor passe devant la borne de connexion S. Sans aborder cette difficulté, qui sort du cadre du programme, remarquons simplement que l’on retrouve l’expression précédente de e(t) en procédant de la façon suivante : comme le champ magnétique est nul à l’extérieur de l’entrefer où se trouve le rotor, le flux magnétique Φ(t) à travers le circuit ne dépend que de l’aire S(t) de la surface du rotor délimitée par le circuit à l’instant t considéré ; ainsi, si nous notons S0 = πa2 l’aire totale du disque rotorique, et s(t) l’aire balayée par la tige OA entre la position de référence où θ = 0 (figure a ci-contre) et sa position à l’instant t, repérée par θ(t) (figure b), nous avons : S (t ) = S0 − s (t ) avec 1188 ∙ Magnétisme et Induction s (t ) = θ (t ) 2π × πa 2 = 1 2 a θ (t ) 2 28 G G G G G G 1 D’où : Φ (t ) = B0 ⋅ S (t ) n = B0 ⋅ S0 n − B0 ⋅ s (t ) n = Φ0 + B0 × a2θ (t ) 2 constant, noté Φ0 1 2 2 Nous obtenons ainsi : e (t ) = − dΦ dt = − B0a θ (t ) soit 1 e (t ) = − B0a2ω (t ) 2 5. Au final, i (t) et ω(t) vérifient le système couplé suivant : ⎧ ⎪ 1 ⎪ = i a2B0 Jω ⎪ ⎪ 2 ⎪ ⎨ ⎪ 1 ⎪ R i = U − a2B0 ω ⎪ ⎪ 2 ⎪ ⎩ Par substitution, nous obtenons : que nous pouvons réécrire : U − a2B0 ω 2 1 = a2B0 × Jω 2 R 1 1 + ω = ω∞ ω τ τ avec τ= 4RJ a 4 B02 et ω∞ = 2U a2B0 −t τ Compte tenu des conditions initiales, l'intégration donne : ω (t ) = ω∞ (1− e ) puis la seconde équation conduit à : i (t ) = U −t τ e R ⎯⎯ ⎯ → ω∞ tτ ⎯⎯⎯ → 0 tτ Ces résultats confirment totalement notre analyse qualitative préliminaire ainsi que l’analogie entre ce moteur et le dispositif du rail de Laplace avec générateur. Nous constatons en outre que la vitesse angulaire limite ω∞ dépend linéairement de la f.é.m. d’alimentation : il s’agit donc bien d’un moteur de vitesse réglable via cette f.é.m. Il faut toutefois que le régime transitoire permettant d’atteindre cette vitesse soit suffisamment bref compte tenu de l’utilisation souhaitée, c’est-à-dire que la durée τ introduite ci-dessus soit suffisamment faible. Avec les données numériques fournies, nous obtenons : ω∞ = 450 rad·s-1 = 4,3·103 tours/min. 6. Nous venons de calculer la vitesse de rotation d’un moteur qui n’entraine aucune charge : en effet, dans notre modèle, rien ne s’oppose à la rotation, alors qu’une partie utile entrainée par un moteur exerce nécessairement un couple résistant sur son rotor. Ainsi, si nous voulons étudier un moteur en fonctionnement de façon plus réaliste, il faut ajouter au modèle un couple résistant, dont le moment par rapport à l’axe s’écrit a priori - Γr , avec Γr positif et proportionnel à l’effort demandé au rotor. Ce type de modélisation a été vu à l’occasion de l’étude du moteur synchrone, dans l’exercice 7 du chapitre 26. L’équation différentielle sur la vitesse de rotation devient alors simplement : = Jω 2 1 a B0 (U − a2B0 ω 2) − Γr 2 R soit 1 1 + ω = ω∞ ′ ω τ τ avec ′ = ω∞ − ω∞ 4R Γ a 4 B02 r (τ est inchangé) La nouvelle vitesse de rotation, ω’∞ , dépend donc de la charge du moteur. Logiquement, elle diminue à mesure que l’effort demandé augmente. Induction au sein d’un circuit mobile dans un champ magnétique stationnaire ∙ 1189
© Copyright 2026 Paperzz