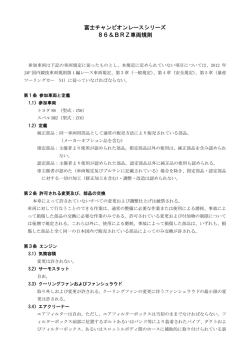
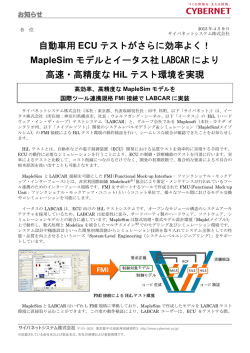
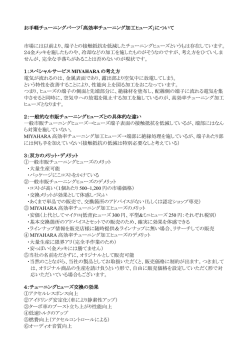
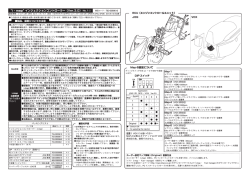
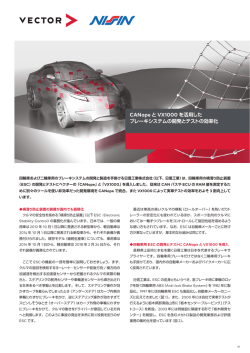
19 B Y PA S S F O R C L O S E D - L O O P T E S T S A Functional View 新しいテスト手法 Function-in-the-Loop Jürgen Crepin、Dr. Wolfgang Eismann、ETAS ECU機能検証に向けたバイパス手法の導入 HiL(Hardware-in-the-Loop)テストシステムは、電子システムのさまざまな開発分野で一般的になってきまし た。自動車環境(ドライバー、車両、路面、外部環境など)をシミュレートすれば、ECU(電子制御ユニット)の 機能や故障診断のクローズドループテストを、実験室で簡単に実施できます。しかし、一般的にHiLシステムが接続 できるのはECUの電気的なインターフェース経由に限られ、ECU内部のソフトウェア変数と直かに情報交換を行う ことは通常はできません。一方、SiL(Software-in-the-Loop)システムはすべての内部ソフトウェア変数にアク セスできますが、物理的な実ECUは対象外です。そこでETASでは、ラピッドプロトタイピングで使用実績のある機 能バイパステクノロジを利用して新たなテスト手法FiL(Function-in-the-Loop)を開発しました。 いかなるECUも、その中心となるのは中央 演算処理装置(CPU)です。CPUは制御 ファンクションを実行し、その結果はハー ドウェアインターフェースを通じて外部に 図1:HiLとFiLのインターフェースハードウェア (パワートレイン用途の例) 接続されます。HiLテストシステムは、こ のECUのハードウェアインターフェースと ハードウェア HiL FiL 電気的な信号コネクタで通信して、シミュ レートしたセンサ値(アクセルペダルなど) やシミュレートしたセットポイントジェネ レータ等の値を受け渡します。HiLシステ バッテリノードコントローラ • • クランクシャフト信号とカムシャフト信号の • • • - アナログ/デジタルコンバータ(例、スロットルポジション信号) • - デジタル/アナログコンバータ(例、ラムダセンサ信号) • - PWM入出力(空気流量センサ信号) • - 抵抗負荷、容量負荷、誘導負荷 • - 角度同期出力 ムはこれら電気的な信号出力により、ECU で実行する制御ファンクションを起動し、 インジェクション信号と点火信号の 制御ファンクションは出力値を計算して車 角度同期測定 載アクチュエータを駆動します。その駆動 出力は再度電気インターフェース経由で HiLシステムに戻り、制御対象モデルが使 用します。これによりクローズドループ制 御回路が形成されます。ここでのECUの電 気的な動作は、実車の場合と同様です。 (インジェクタおよびセンサ信号など) 20 B Y PA S S F O R C L O S E D - L O O P T E S T S アクセルの位置や冷却水の温度など、制御 対象モデルで計算されるセットポイント 図2:FiLシステムの概要ブロック図 ジェネレータやセンサの物理値は、HiL出 力ドライバソフトウェアとハードウェア (信号処理回路など)で電気信号に変換し ユーザーインターフェース ホスト コンピュータ ます。あるいは、データバス( CAN や FlexRayなど)に送られます。ちなみにこ れらの電気接続は、信号特性を正確に模擬 するために専門的な知識や経験が必要です。 また、ECUがスロットルバブルの起動など ドライバー・車両・環境で構成される全体のモデル アクチュエータを駆動するために生成する リアルタイム コンピュータ PWM信号は、専用の信号処理回路と必要 な機能を備えた専用I/Oハードウェアで収 集します。次の手順として、HiLシステム は入力ドライバソフトウェアで、この電気 信号を、プラントモデルのための物理値に マイクロ コントローラ 変換します。 ソフトウェアレイヤ HiLを用いたECUテストは、たとえばECU ECU 場クレームとなった現象の再現といった用 制御 ファンクション ドライバー ハードウェアイン ターフェース で最終ソフトウェアリリーステストや、市 途が一般的です。HiLテストは本質的に再 現性があり、テスト環境を1回作成すれば、 ドライバーや車両を危険にさらすことなく、 エミュレータ プローブ(ETK) リアルタイムに複数回実行できるという点 ECU りません。また、自動テストを実行できる で、HiLテストの必要性には疑う余地があ ので、短時間に広範囲のテストを行えると いったメリットもあります。 FiL – 新しい代替手法 ECUの電気的インターフェースを直接使用 しないECU内部の制御ファンクションのテ ストでは、HiLシステムに必要な複雑な電 気接続ハードウェアが不要です。通常、SiL 図3:ラピッドプロトタイピング用バイパスフックと Function-in-the-Loop システムによる妥当性確認を完了した制御 ラピッド プロトタイピング フック ファンクションは、ECUに組み込んだ後は Fil HiLシステムでテストします。この作業の フック 簡略化のため、ETASでは、FiLテストシス テムを用意しています。これは、実績のあ る機能バイパステクノロジを利用していま 読取り 書込み 読取り 書込み 制御対象 モデル す。FiLテストシステムでは、HiLシステム で必要な信号処理ハードウェアが不要なの で、コストや手間は明らかに軽減でき、さ らに、実際のECUハードウェアに組み込ま れた制御ファンクションをテストできます。 A:ラピッドプロトタイピング向けバイパス B:FiL向けバイパス パワートレインECU用途において、HiLシ ステムよりFiLの方がコスト節減の可能性が ある例として、図1を参照してください。 R E A LT I M E S ECUを動作させるには、車両システムに応 の入力にソフトウェアフックが必要です。 い展開が期待されます。したがって FiL じた電源と、電気的に制御できる適切な したがって、FiLテストではフックインス (Function-in-the-Loop)テストは、ECU I/Oコネクタが必要です。エンジン制御ユ トールに対応する高度な柔軟性がECUソフ 開発の成功の鍵となる重要な構成要素にな ニットを動作させるには、通常、カムシャ トウェアに必要になります。一般的にフッ る可能性があります。 フトセンサとクランクシャフトセンサの出 クインストールは、ECUサプライヤのソフ 力信号をECUに与える必要があります。こ トウェアリリースプロセスにすでに組み込 れは、それぞれの監視機能がCPUの外部に まれています。しかし、多くの場合OEM 頻繁に接続し、それらがFiLアクセスの範囲 はコスト面と開発期間の短縮要求から、 外になるためです。しかしFiLシステムの場 ECUサプライヤに依頼せずに、自身でソフ 合、HiLシステムに必要な電気的入出力信 トウェアフックのインストールに対応する 号と電気負荷を与えるさまざまなハード 方法が求められます。 ウェアを省くことができます。必要な配線 は明らかに簡素化でき、電気信号入出力 そのような背景から、ETASは、EHOOKS ハードウェアのソフトウェアドライバの調 ツールの開発ではRobert Bosch GmbH社 整の手間が大幅に軽減されるため、確認す と提携しました。このソフトウェアツール べきハードウェア構成要素を省略できるの (EHOOKS)では、ECUサプライヤの手を で、さらなるコスト節約が期待されます。 わずらわすことなくECU制御機能にソフト FiLテストを実現するには、ECUソフトウェ EHOOKSでは、ECUソフトウェアの内部 アのソフトウェアフックが重要な役割を果 構造に関する情報を利用して、フックの高 たします。自動車産業ではこのテクノロジ い信頼性を保証しています。このような情 ウェアフックをインストールできます。 はかなり以前から制御ファンクションのラ 報は、一般的にはECUサプライヤの所有情 ピッドプロトタイピングに利用されてきま 報だと考えられますが、セキュアな状態で した。この活用方法では、ETASが開発し ベースの制御ファンクションと、外部ラ EHOOKSに利用できます。ETASは市場の ECUが幅広くFiLに対応できるよう、さま ざまなECUメーカーと連携して、このツー ピッドプロトタイピングコントローラで実 ルの対応範囲の拡張計画を進めています。 行する新規開発ファンクションとの間でリ 一方で、FiLテクノロジはソフトウェアフッ アルタイム接続を実現します。 クベースのバイパス手法に限定されたテク ソフトウェアフック サービスベースの手法(サービスベースバ ラピッドプロトタイピングとFiLのいずれの イパス)等のすでに確立されたさまざまな 場合も、ECUの制御ファンクションにソフ バイパステクノロジと組み合わせて展開で トウェアフックをインストールする必要が きます。 たエミュレータプローブ(ETK)が、ECU ノロジではありません。FiLテクノロジは、 あります。ソフトウェアフックは、テスト 対象のファンクションの入力と出力の両方 まとめ またはいずれかを、外部のシミュレーショ 参照してください。ラピッドプロトタイピ FiL(Function-in-the-Loop)は、従来の 確立されたテスト手法であるMiL(Modelin-the-Loop)、SiL(Software-in-theLoop)、HiL(Hardware-in-the-Loop) の補完手段として有効です。ECUインター フェースETKを、ETASのマルチコアLABCAR-RTPC などHiL テストシステムのシ ングでは、このファンクションは実質的に ミュレーション環境に接続すると、特に、 新しい関数fRP(x)に置き換えることができ、 制御ファンクション間の複雑な相互連携に f(x)の出力にソフトウェアフックを挿入す 関するテストなど、新しいテストへの可能 れば外部のリアルタイムシステムで実行で 性が広がります。HiLシステムと比べてFiL きます。 の魅力は、その経済性と柔軟性にあります。 ン信号と接続します。テスト対象ファンク ションの出力は、ソフトウェアフックなし でアクセスできます。ラピッドプロトタイ ピングとFiLにおけるソフトウェアフックの 展開の違いについては、図2の副関数f(x)を 一方、FiLテストシステムの場合、この副関 EHOOKSによるソフトウェアフックの生成 数をプラントモデルに接続するため、f(x) 自由度の向上により、FiLテクノロジの幅広 J 1/2010 21
© Copyright 2026 Paperzz