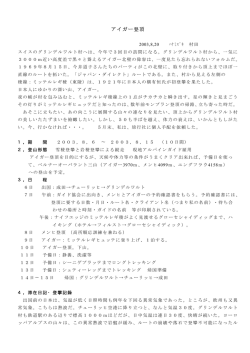
運動方程式の積分 仕事とエネルギー 運動エネルギー ポテンシャルエネルギー CS 2003 狩野 1 運動方程式から得られる知識 z 個別の運動について • z 運動方程式を,与えられた力と初期条件で解く すべての運動について • • 力積と運動量 • 力が一定時間加わると • 運動量が変化する 仕事とエネルギー • 力が一定距離加わると • • • 運動エネルギーが変わる ポテンシャルエネルギーが変わる エネルギーが散逸する CS 2003 狩野 2 物体に仕事をする ↓ 運動状態が変化する ↓ された仕事に等しい 運動エネルギーを 獲得する 運動エネルギーの意味と例題 運動エネルギーは,その時の物体の運動状態だけで決まる(履歴によらない) 例. 滑らかな水平面上に 静止している物体 ( m = 1kg)に 一定の力( F = 1 N)を加えて T = 1sの間,直線上を加速した。 このとき,物体はどれだけの 運動エネルギーを得るか? 最終的に得た速度から直接に計算するなら 2 1 2 1 F 1 F2 2 mv = m T = T = 0.5 J 2 2 m 2 m 仕事により計算するなら L W = ∫ Fdx = FLだから,移動距離がわかればよい : 0 1F 2 1 F2 2 L= T だから,W = T で同じ。 2m 2 m CS 2003 狩野 3 運動エネルギーの転換 z 物体が相手に力を及ぼし(及ぼされ)つつ移動する • • 相手の運動状態が変わるとき • 相手の物体の運動エネルギーが変化する • ミクロで乱雑な運動のエネルギーになる • • 相手を蹴飛ばす! 摩擦熱 相手との距離が変わるとき • 自分の運動状態を変化させながら,力のもとで移動 • 距離がもとに回復する過程では • • 運動状態を変える潜在能力(ポテンシャル)の獲得 • • • • 仕事をする 運動エネルギーが仕事を通じて「どこか」に移る,と考える 逆に仕事をされて,運動状態がもとに戻る。 ポテンシャルエネルギー バネ,万有引力,… 3 1 2 0.5 1 -1 0 -0.5 -0.5 0 0.5 1 -1 CS 2003 狩野 4 数式的表現(1次元) dv m =F dt → → dv m =F dt t2 t 2 dv ∫t m dt dt = ∫t Fdt 1 1 p2 − p1 = ∫ Fdt → t1 mdv = d (mv) ≡ dp = Fdt t t r v2 2 2 2 dv dv dx dv m 2 ∫x m dt ⋅ dx = ∫t m dt ⋅ dt dt = ∫t m dt ⋅ vdt = 2 v = r∫ F ⋅ dr v1 1 1 1 1 x2 → 運動量の変化は 受けた力積に 等しい t2 x → 1 1 2 2 m m 2 2 2 v(t2 ) − v(t1 ) = p2 − p1 = ∫ F ⋅ dx 2 2 2m 2m x1 → m CS 2003 狩野 dv m 1 2 v = d v2 = d p = F ⋅ dx dt 2 2m 運動エネルギーの変化は, された仕事に等しい 5 x 例題:重力のもとで落下する物体 z 重力が物体にする仕事 • x1 -mg 物体の運動エネルギーを変える x2 x 1 2 1 2 2 mv2 − mv1 = ∫ (− mg )dx = − mg ( x2 − x1 ) 2 2 x1 1 2 1 mv2 + mgx2 = mv12 + mgx1 2 2 v1=0 の場合 出発点の高さをhとし 終点の高さを0,速度をvとすると どの位置でもこの 和をとれば同じ値 v1 > 0の場合? もとの位置にもどる と,同じ速さになっ ている!! 0 上向きにmg の(重力に抗する)力でhだけ 上向きに物体を運ぶとき,物体はmghの 仕事をされる. その仕事が運動エネルギーに転換される 1 2 mv − 0 = − mg (0 − h) 2 1 2 mv = mgh 2 CS 2003 狩野 hだけ高いところにある物体は mghに等しい量の 「運動エネルギーに転換できる能力」 を蓄えている ポテンシャル エネルギー 6 例題:単振動 z x 0 バネの復元力がする仕事 • 自然長の位置が原点 F = − kx k 2 k 2 − kx dx = ( ) − x 2 − − x1 ∫x1 2 2 k k 1 1 mv 22 + x 22 = mv12 + x12 2 2 2 2 1 1 mv 22 − mv12 = 2 2 x2 位置によらず,和を作れば一定の値 もとの位置に戻ると速さは同じ CS 2003 狩野 バネの力に抗してした仕事が 運動エネルギーとなる能力 として蓄えられる k m v (t ) = − aω sin ω t = − v0 sin ω t x (t ) = a cos ω t , ω = 1 2 1 2 2 2 mv = ma ω sin ωt 2 2 1 = ka 2 sin 2 ωt 2 1 2 1 2 kx = ka cos 2 ωt 2 2 和をとると,いつでも 1 2 1 2 2 1 2 ka = ma ω = mv0 2 2 2 7 v F 例題:摩擦力 z 摩擦力 • z 重力 • z 速度の向きと反対 1 2 1 2 mv2 − mv1 = − 2 2 速度によらず常に一定 バネの復元力 • 速度によらず位置だけで決まる x2 ∫ Fdx x1 "摩擦力が物体にする仕事は 移動の向きによらず常に負 摩擦力のする仕事で,運動エネルギー に変換できる能力を蓄積することは不可能 ←→ 摩擦がなければ運動できない CS 2003 狩野 8 数式的な表現(3次元) dv m =F dt → → dv m =F dt → t2 t 2 dv ∫t m dt dt = ∫t Fdt 1 1 運動量の変化は 受けた力積に 等しい t2 p 2 − p1 = ∫ Fdt → t1 mdv = d (mv ) ≡ dp = Fdt r2 t t r v2 2 2 2 dv dv dr dv m 2 ∫r m dt ⋅ dr = ∫t m dt ⋅ dt dt = ∫t m dt ⋅ vdt = 2 v = r∫ F ⋅ dr v1 1 1 1 1 r → 1 1 2 2 m m 2 2 2 v(t2 ) − v(t1 ) = p2 − p1 = ∫ F ⋅ dr 2 2 2m 2m r1 → m CS 2003 狩野 dv m 1 2 v = d v2 = d p = F ⋅ dr dt 2 2m 運動エネルギーの変化は, された仕事に等しい 9 例題:重力による仕事 重力による仕事は 「変位の重力方向の成分」 のみが寄与する F = mg F ⋅ dr = F ⋅ dr& + F ⋅ dr⊥ = F ⋅ dr& r2 重力による仕事は 経路によらず 始点と終点の高さだけで決まる ∫ F ⋅ dr = ∫ F ⋅ d r & r1 r1 水平移動すなわち 等高面(等ポテンシャル面)が 同じ位置の間の移動では 重力は仕事をしない 2点間で 物体がもつポテンシャルエネルギーの差は, その2点間の高度差を h とすると mghである。 CS 2003 狩野 r 2の高さ r2 = ∫ F ⋅ dr& r1の高さ r2 dr dr& g dr⊥ r1 10 V 例題 重力による放物運動 z y0 θ -mg 重力による放物運動 • • 運動エネルギーとポテンシャルエネルギーの和が一定 運動方程式の解を使って示す d 2x 水平方向: 2 = 0 → vx (t ) = V cos θ dt d2y g 垂直方向: 2 = − g → v y (t ) = − gt + V sin θ → y (t ) = − t 2 + V sin θ ⋅ t + y0 dt 2 1 1 2 mV + mgy0 = m(vx2 (t ) + v y2 (t )) + mg y (t ) ? 2 2 1 m ( vx2 (t ) + v y2 (t ) ) 2 1 = m (V 2 cos 2 θ + V 2 sin 2 θ + g 2t 2 − 2 gtV sin θ ) 2 1 1 1 = mV 2 + mg 2t 2 − mgt ⋅ V sin θ 2 2 2 CS 2003 狩野 11 例題 2次元の単振動 運動方程式 2個のバネの復元力がする仕事は経路によらず, 原点(自然長)を中心とする円の上の移動は仕事0 d 2x d 2r m dt 2 = − kx m 2 = F = − kr ⇔ dt 2 d y m r = xe x + ye y = − ky 2 dt F ⋅ dr = − kr ⋅ dr k k = − kx dx − ky dy = − d x 2 − d y 2 2 2 k k k −d ( x 2 + y 2 ) = −d r 2 = −d r 2 2 2 2 1 y 0 -1 2 力:どの位置でも, 原点に向かう(半径方向)。 原点からの距離に比例する大きさ。 1.5 z 1 0.5 ( x2 , y2 ) 0 -1 0 x 1 微小な移動を,半径方向と それに直交する方向に分解 力が仕事に寄与するのは 半径方向の移動だけ CS 2003 狩野 ∫ ( xdx + ydy ) = ( x1 , y1 ) ( x2 , y2 ) ∫ ( x1 , y1 ) x2 y2 x1 y1 = ∫ xdx + ∫ ydy = xdx + ( x2 , y2 ) ∫ ydy ( x1 , y1 ) 1 2 1 ( x2 + y22 ) − ( x12 + y12 ) 2 2 1 1 2 2 m(vx + v y ) + k ( x 2 + y 2 ) = 一定 2 2 12 例題 水平面上の摩擦力うける運動 z z 摩擦力の仕事は経路の長さによる もとの位置に戻ってきたとき,速さは復元し ない。 CS 2003 狩野 13 保存力と非保存力 z 外力Fが物体にする仕事 • 保存力 • 経路によらず,始点と終点の位置だけで決まる • 位置だけの関数の勾配として与えられる • 非保存力 • それ以外 CS 2003 狩野 14 r ポテンシャルエネルギー U (r ) = − ∫ F ⋅ dr r0 (位置エネルギー) z 位置1→2の移動のあいだに起きる運動エネルギーの変化ΔEK は,その間 に保存力がした仕事W21 と一致する • ・ • • z ポテンシャルエネルギーは差だけに意味がある • • • z (ΔEK −W21)の値は,経路によらず,いつも0 U = −W21 を「1と2の間のポテンシャルエネルギーの差」という 保存力のもとで運動する物体は常に EK + U =一定 保存される エネルギーの基準点は適宜決める 基準点から計算しやすい経路で,Fによる仕事(積分)をもとめ,ポテンシャルを計算する 基準点は力が 0 となる位置を選ぶことが多い。 保存力に抗して物体に力を加え静かに移動したとき • その力がした仕事とポテンシャルエネルギーの差が等しい CS 2003 狩野 15 外力のもとで 物体を移動させるのに必要な仕事 z z 2地点間で、外力Fに抗して、物体を(同じ速度で)移動させるときの仕事 • • Fと逆向きの力G(=−F)を加える必要がある Gが物体にする仕事は物体に(もしくは空間の性質のひずみとして)蓄積される Fだけが作用して運動する物体の運動エネルギーの変化と量的に一致 x2 x2 U ( x2 ) − U ( x1 ) = ∫ Gdx = − ∫ Fdx x1 G=−F x1 F CS 2003 狩野 16 例題 万有引力の ポテンシャルエネルギー x y z z z 原点に質量Mの物体 位置rに質量mの物体 mのポテンシャルエネルギー 無限遠をエネルギーの基準とする 0 1 -1 0 -1 -2 -3 積分の経路にはよらない -4 力は常に原点に向かう 移動を半径方向と円周方向に分解 仕事は同心球面上で同じになる 計算: 位置ベクトル r の方向の直線上で積分する 定義 F = −G -1 0 z z 1 mM r2 r ⋅ r mM r − G dr 2 ∫ r r 無限のかなた r U (r ) = − 引力 CS 2003 狩野 ∞ mM dr ′ U (r ) = + ∫ G 2 dr ′ = −GmM ∫ 2 r′ r′ ∞ r r ∞ mM 1 = +GmM = −G r r r 17 等ポテンシャル面(等高線,等高面) 例:1質点による万有引力ポテンシャル U(r)= - GmM/|r| が一定の位置をつなげると 原点を中心とする球面になる 等ポテンシャル面 その2次元断面は円 等高線と鳥瞰図 1 0.5 -1 1 -2 0 0.5 -3 -0.5 -1 0 -0.5 -0.5 0 -1 -1 -0.5 0 0.5 1 0.5 力は等高線に直交する 等高線が密なとき力が大きい 1 -1 CS 2003 狩野 18 ポテンシャル曲線 z z ポテンシャルエネルギーのグラフ エネルギーの「0」は適宜決める 全エネルギー • 力が0となる位置をとることが多い 運動エネルギー ポテンシャル エネルギー • 無限遠,自然長,… z 運動可能な範囲 • 運動エネルギーは負にならない z 安定な平衡点と不安定な平衡点 • ポテンシャル曲線の傾きが力を表す CS 2003 狩野 19 エネルギー積分 p2 + U ( x) = E = 一定 2m を用いると粒子座標の時間変化を得るのが 運動方程式から求めるより簡単になる. dx = ± 2m ( E − U ( x ) ) dt dx ± = dt 2 ( E − U ( x) ) m dx ±∫ = ∫ dt 2 ( E − U ( x) ) m p=m CS 2003 狩野 20 ポテンシャルUの勾配 grad U dU = ∂U ∂U ∂U dx + dy + dz = gradU ⋅ dr x y z ∂ ∂ ∂ Uの変化がない向きにdr移動する(等高面上の移動): 1 dU = 0 ⇒ gradU ⋅ dr = 0 drは等高面内にあるから,gradUは等高面と直交 0.5 ∂U ∂U ∂U gradU = , , の大きさはUの勾配を表す ∂x ∂y ∂z 0 F =− dU dx -0.5 保存力の正体 -1 -1 CS 2003 狩野 -0.5 0 0.5 21 1 1/r ポテンシャルから力を導く V (r ) = κ r ∂V ∂V ∂V F = −∇V = − ex + ey + ez ∂y ∂z ∂x dV ∂r ∂V κ x = = − 2 ∂x dr ∂x r r ∂r ∂ 2 2 2 1/ 2 = x + y + z ) ( ∂x ∂x x 1 2 2 2 −1/ 2 2x = = (x + y + z ) r 2 CS 2003 狩野 F= κ x r2 r 22 z 応用問題 物体に作用する力は面か らの垂直抗力と重力だけ。 垂直抗力は角θの関数 重力の半径方向の成分が物体 を球面に押しつける これと垂直抗力の差が円運動 の向心力をつくる 重力による仕事で加速 重力の半径方向成分は角度 とともに小さくなる。 速度が増して,円運動に必要な 向心力が大きくなる。 CS 2003 狩野 半径rのなめらか球面上を質量mの質点が 天辺から滑り落ちる。重力の影響で質点は 徐々に加速しついには球面から飛び出す。 これが起きるのはどの位置か。 重力の半径方向成分が 向心力と一致する位置で 垂直抗力は0となる すなわち球面から離れる R θ Rは質点に仕事をしない ので,重力によるポテン シャルエネルギーと運動 エネルギーの和が保存 v2 円運動をする限界:m = mg cos θ r 1 エネルギー保存: mv 2 = mgr (1 − cos θ ) 2 mv 2 = 2mgr (1 − cos θ ) = rmg cos θ → 2(1 − cos θ ) = cos θ cos θ = mg 2 3 23
© Copyright 2026 Paperzz