脳における知能実現に関する二つの仮説の検討
大森隆司*,小川昭利
Consideration of two hypothesis for brain intelligence realization
Takashi Omori, Akitoshi Ogawa
Symbolic processing is a specific feature of human intelligence. But when we are asked as “What is the
symbolic processing in human brain ?”, we don’t have any clear explanation nor model. In this paper,
we propose two hypothesis of (1) the event driven internal processing model, (2) the functional parts
combination model of the brain internal procedure, and discuss on the system design of brain
architecture that enable those models.
キーワード: シンボル処理,脳,モデル,手続き,機能部品
Keywords : symbol processing, brain, model, procedure, functional parts
1. はじめに
ヒトという種は優れた知能をもっているが,その知
能のメカニズムは脳に帰することができる.脳はある
種の基本的な能力を遺伝的に与えられて生まれてき
て,その肉体や環境との相互作用の過程で知能を発達
させ,結果として学習・推論・プランニング等の高次
機能を獲得していくと考えられる.
学習や推論などの基本的な能力は脳にもともと備
わっているという考え方もある.しかし言語における
語彙獲得のように[1][2],個々の高次のタスクでは例
えヒトでも初期には優れた学習能力は観測されず,そ
の問題領域にある程度の経験・知識がそなわって初め
て強力な学習能力を示すようになる.この事実から
我々は,高次機能におけるヒトの優れた学習能力はそ
の知的領域でのメタ知識に支えられたヒューリステ
ィクスであり,それは経験的に獲得されると考える1.
ではそのようなメタ知識やヒューリスティクスを
獲得することを可能とする脳の知能システムの基本
1
例えば子供の言語における数詞の獲得も同様の事
例である[3].
* 北海道大学大学院工学研究科複雑系工学講座
〒060‑8628 札幌市北区北 13 条西 8 丁目
Complex Systems Engineering,
Hokkaido University,
Kitaku, Kita 13-Jyou, Nishi 8-Chou, Sapporo, Japan
デザインはどのようなものなのだろうか.この問題は
現時点ではまだ研究の対象としての認知もあまりな
されていないが,その探索はそのまま脳の高次機能の
学習原理,さらにはヒトの知能の起源の理解につなが
る.そのような深いヒト知能の理解は,単に科学とし
ての脳の理解だけでなく,フレーム問題やシンボルグ
ラウンディング問題とっいた未解決の問題[4]をかか
えた従来の知能研究に新しい方向性を与えることが
期待できる.
そこで本稿ではこの問題の解明にむけて,ヒトの脳
で知られている事実から二つの仮説的な知能処理の
モデルを提案し,その考え方について説明する.そし
てそのモデルが持つ特性について,従来の脳研究,A
I研究の中での位置づけについて議論する.
2. シンボル処理様の行動の分析
<2・1> 強化学習とプランニング
例えば人工知能研究の世界では,地図世界でゴール
に到達する課題,さらにはゴール到達行動を発見する
課題は,ナビゲーション問題やプランニング問題と呼
ばれ,典型的なシンボル処理の課題と考えられている.
その手法の一つに強化学習がある.古典的な強化学
習では,与えられた課題に応じて与えられる報酬を最
大化するように,環境の個々の状態に対応した行動を
試行錯誤的に探索していく.このような学習システム
の問いに答えることは難しいが,強化学習やプランニ
では,環境からの入力と出力の分節化(分類的認識と
離散的出力)が前提であり,内部処理においても分節
ングのようなシンボル様の処理が脳から生まれるメ
カニズムについて脳の視点から議論することはでき
化された表においてゴールで与えられた報酬を減衰
よう.
伝播させて探索的に作り出した行動に評価を与え,学
習を実現している.この意味で,強化学習は基本的に
3. シンボル処理様の処理を発生させる脳メカ
分節化された世界での分節化された行動の確率的な
学習である.しかし強化学習はあくまでも報酬に導か
れた試行錯誤の結果の記憶であり,シンボル的処理と
呼ぶには単純すぎる.
シンボル処理の典型はプランニングの行動である.
プランニングとは,現在状態からある行動(または行
動系列)を行ったと想定したときの結果状態を予測し,
その状態の評価に基づいて行動を決定する手法であ
る.その場合にも,個々の状態および行動は離散的で
あり,結果として得られる異なる状態に異なる評価が
与えられる基盤となっている.そしてその延長に Tree
Search を代表とする多数の手法が存在する[5].
強化学習とプランニングは離散的な状態と行動を
必要とするという点は同じであるが,評価を得るのに
多数回数の試行に基づく評価の伝播を用いるか,大量
の内部記憶を用いてオンラインで状態評価を作り出
すかという点に違いがある.その違いは,長い学習時
間に対する組合せ爆発というトレードオフの関係に
あり,これまでの多くの研究はこの問題解決に多大の
努力を払ってきた.ところが,この問題にヒトはあま
り苦しんでいない.ヒトは強化学習とプランニングの
両方を行うようであるがそのどちらかに極端に偏る
ことは無く,どこか中間の戦略を取っているように見
える.
<2・2> シンボル処理の特性
工学的なシンボル処理とは,非常におおまかなこと
ニズムについての仮説
<3.1> 脳の現象からの二つの仮説
ここでは脳に関する事実から,脳がシンボル処理様
の動作を作り出す過程のモデルについて検討する.そ
こで考えることは,最近の非侵襲の脳計測技術が明ら
かにした脳の活動である.
脳ではあるタスクを行うと,その処理に関連する脳
部位の血流が増加することが知られている.その部位
はタスクごとに異なることから,各部位は異なる機能
を持っており,異なるタスク毎に異なる機能が組み合
わされて脳内処理の回路を組み立てているというこ
とが推測される.
しかしあるタスクといっても,それが必要とする処
理は一律ではない.タスクの各段階で必要とされる情
報や処理は異なり,さらに同一タスクであってもその
ときの状況や材料によって必要とされる処理は異な
るであろう.脳はその状況に適応して脳内の処理回路
を組み立て,タスクを順次実行していっていると考え
られる.
以上から,脳は必要な段階で必要な処理を組み合わ
せて問題解決を段階的に実現している,というモデル
化が可能であろう.この考え方は計算機の世界では
「手続き(procedure)」と呼ばれるものである.
この概念をまとめると,脳の知能処理系に関して次
の二つのモデル(仮説)が考えられる.
仮説Ⅰ 脳内処理手続きのイベント駆動モデル
を言えば,離散的なシンボルとして記号を使用し,計
脳内の処理システムは,外界と脳内の全体をみて
算機で記号を操作することで記号の組合せの探索を
行なう手法といえよう.強化学習やプランニングのこ
特定の状況を検出するシステム(状況検出器)とそ
とを考えると,シンボル処理の本質は,離散的な表現
の検出に伴って起動される処理回路からなってい
る.処理の結果はまた新たな状況を作り出し,結果
とその操作可能性にあるように見える.
しかし記号の操作だけではその処理を現実世界と
としてあるタスクの解決過程は,初期の状況から
対応させることはできない.現実世界と記号系の間で
の双方向のマッピングが必要であり,グラウンディン
グ(接地)問題と呼ばれている.知能機械を取り巻く環
境・状況との相互作用によってこれを解決しようとい
う強化学習のような方法が,最近の傾向である.
一方でヒトの脳における思考は接地問題は解決さ
れているように見える.強化学習のような方法が脳の
シンボル過程かというと,それは異なるように思える.
ではヒト脳はどうやって解決したのか?現時点でそ
次々と処理によって作り出された新しい状況とそ
れに対応した処理起動の系列からなっている.
このモデルによると,個々の学習過程とはあるタス
クに直面したときにその状況で起動するべき適当な
処理の系列を探索する過程である.例えば強化学習や
プランニングはそのための手法であり,古典的な
production system とは人間がその系列を設計して記
述した知能システムの実現形であると考えられる.
ただ,強化学習などの自動的な学習システムでは,
状況とは与えられた全ての変数の組合せであること
が多いが,production system などの人間が設計する
り,そのためには状況の分割のための方法論がまた必
システムでは,人間がその状況に必要な変数のみを適
切に選び出して状況を規定することが多い.状況の精
要である.
密な規定には,人間の得意とする必要な変数の選択と,
自動的な学習が得意とする状況範囲の設定の両方が
必要であろう.
仮説Ⅱ 脳内処理手続きの機能部品組合せモデル
個々の状況で起動される脳内の処理は,脳内の多
数の機能部品(機能モジュール)を動的に組み合わ
せることで実現される.その組合せは,個々のモジ
ュールを起動する内的な信号によって制御され,結
果として脳全体としては一つの制御信号のベクト
ル(一種の内的な注意であり,注意ベクトルと呼ぶ)
が処理回路を規定する知識となっている.
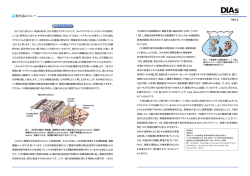
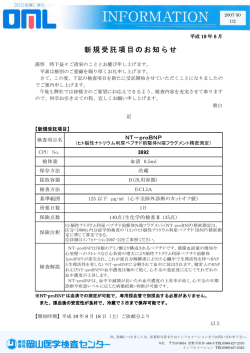
<3.2> 脳知能システムのアーキテクチャ
以上に述べてきた二つの仮説に基づく脳システム
の全体像を図 1 に示す.システムは下のほうから(ⅰ)
処理を実施する回路を構成する機能部品群とそれら
の間のコネクション,(ⅱ) 状況に依存して機能部品
の選択を行う注意機構と選択ライブラリおよび状況
認識部,(ⅲ) 強化学習により必要に駆動されて部品
集合の探索を行うシステム,の3階層からなっている.
(ⅰ) 機能部品群とコネクション
入力・認識・記憶・動作生成・情報保持といった多
様なタスクを処理・実行するのに必要な部分機能を実
現するモジュール群が,多様なつながり方で接続され
この考え方では,仮説Ⅰの状況検出器が検出する
個々の状況に一つの注意ベクトルが対応し,結果とし
て一つの脳内処理回路を形成する.しかし実際には脳
内回路による処理には作業記憶を含んだもののよう
に多段の処理を必要とするものも存在すると考えら
れ,注意ベクトルは複数のベクトルからなる系列であ
ると考えるのが自然である.その意味で,各状況に対
応した注意ベクトル列が一つの脳内処理手順を表現
していると考えられる.
注意ベクトル列の探索は,基本的には試行錯誤が主
要な方法と考えられる.注意ベクトル列の各要素は注
意を向けるか向けないかの二値であり,全体として
{1,0}の配列の探索となる.その探索の方法について
は工学的には多様な方法が提案されているが,脳にお
ける探索の方法についてはいまのところほとんど判
っていない.おそらくは,確率探索と強化学習を組み
合わせたような手法が使われているのではないかと
想像される.
ている.その中から必要な部品,またはそれらの間の
コネクションを選択することで,信号の流れが発生し,
その流れの過程で信号に処理がなされて目的とする
タスクの要請を満たす出力を得ることができる.
(ⅱ) 機能部品選択ライブラリと状況認識部
現在のタスクの状況を認識し,機能部品群のなかか
ら現在の状況での処理に必要とされる部品群を選ん
で活性化することで,回路を動的に構成する.個々の
状況の認識とそれに対応した選択の組み合わせ(注意
ベクトル列)はライブラリとして蓄積されており,そ
のペアが蓄積されていくことが知的機能の発達と考
える.状況は多数の入力の中の一部による部分状況で
あり,ある瞬間の入力に対して複数の部分状況が認識
され,複数の組合せが同時に起動されることもありう
る.その場合はいわゆる dual task の状況であり,機
能部品に矛盾が無い限りは性能の低下無しに処理が
工学的な強化学習においては,「状況」とは全ての
実現できる.状況の認識と処理の実施は自動的に行わ
れる.
感覚情報の組合せの空間の中の一点として表現され
ている.しかし現実の問題を考えると,全ての感覚入
(ⅲ) 強化学習による部品集合の探索
新しいタスクや状況では,状況の新規の認識・学習
力の組合せ空間で状況を定義することは無意味であ
(世界の分節化)及び注意ベクトル列の探索が必要と
り,その場の空間の中でその課題に必要な入力のみを
選択して状況の空間を作り出すことが重要となって
なる.タスクの実施という目標を報酬と考えるなら,
この学習・探索は強化学習の枠組みで行われるべきで
くる.すなわち,状況とは感覚入力の部分空間の中で
ある.しかし現在の強化学習モデルがそのままこの目
定義されるものであり,その部分空間(変数の選択)自
体がまた状況に依存している.この部分空間の発見は
的に使用できるかどうかは不明である.
いまだ解決されていない.
もう一つ考えなければならないことは,識別される
べき状況の数は発達とともに増加していくことであ
る.以前は区別のつかなかった状況が,経験の蓄積と
ともに識別して異なる処理回路を割り当てる必要の
あるものに変わっていく,というのは自然な流れであ
4. 考察とまとめ
以上,脳のおけるシンボル処理様の機能を生み出す
システムのモデルとその働きについて述べてきた.通
常の工学的な装置との大きな違いは,ある個体(エー
ジェント)は複数のタスクを順次にこなしていくこと
で多数の機能部品を獲得し,それを離散的に操作する
ことで多様なタスクに対応している.従来の工学研究
では,特定の目的を満たす装置,あるいはモデルがで
きあがった時点で,開発された処理モデルの知的能力
文
(1)
を議論してきている.しかし本モデルの考え方では,
それだけではシンボル様の処理は生まれない.多様な
タスクの解決を要求してくる厳しい環境が必要であ
る,ということになる.
本モデルの研究手法は,現時点では計算機シミュレ
ーションである[6].これが本当の実世界の課題で通
(2)
用するのか,検証が必要であるが,そのためには現在
は GA を使用している機能部品の組合せの探索を個体
レベルで可能なものにする必要がある.また,機能部
(3)
品は与えられているが,その自律的な獲得もまた重要
な課題である.
(4)
(5)
(6)
献
Omori, Tohyama, Shimotomai : Brain
architecture for Intelligence −Evaluation
of event driven learning procedure hypothesis
in vocabulary spurt phenomenon−, Proc. of
International Symposium on Nonlinear Theory
and its Applications(NOLTA),387‑390, 2001
大森:脳知能システムのイベント駆動手続き
仮説−語彙獲得の加速現象を例題として−,電
気 学 会 産 業 シ ス テ ム 情 報 化 研 究
会,IIS‑00‑45,2000
Uchida N., Imai M.: Heuristics in learning
classifiers: The acquisition of the
classifier system and its implication for the
nature of lexical acquisition, Jap. Psych.
Res., Vol.41, No.1, 50‑69, 1999
「フレーム問題」,「シンボルグラウンディン
グ」
,認知科学辞典,共立出版,2002
古川康一 監訳:エージェント アプローチ 人
工知能、共立出版 1997
Ogawa A., Omori T.: Looking for a suitable
strategy for each problem ‑Multiple tasks
approach to navigation learning task‑,
EpiGenetic Robotics Symposium, 2002
図 1 脳でのシンボル処理様の機能の発現のためのアーキテクチャ
© Copyright 2026 Paperzz