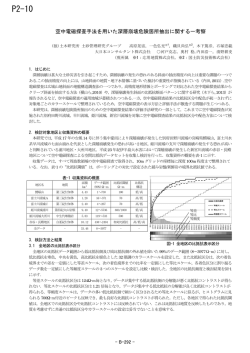
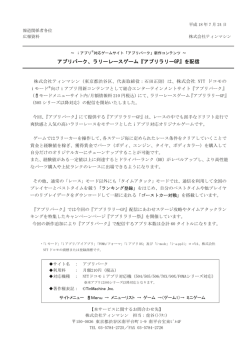
競技用 EV カーにおける駆動系の見直し -1 モータによる 2 系統の減速機構長野県工科短期大学校 制御技術科 13A204 大塚 優聖 1. はじめに 制御技術科では例年「Ene-1 GP SUZUKA」に出場し ている.この競技は,単三型充電式乾電池 40 本を電源と する自作電気自動車に乗り,一周のタイムで競う「ONE LAP タイムアタック」を三回行い、その合計タイムで競 う.さらに今年度は,同じ電気自動車の競技会である, 「Ene-1 GP MOTEGI」に初出場した.こちらは「ONE LAP タイムアタック」と,90 分間の周回数で競う「90 図 1 鈴鹿用の駆動系 分ロングディスタンス」という二つの競技を行う. これらの競技で記録を伸ばすためには,車両を軽量化 し,余分なエネルギー消費を減らす必要がある. 本研究では,エネルギーの消費量を減らすため,車両 を大会規定重量である 35kg に近づけることを目的とし, モータ軸 特に重量の多い駆動系の見直しを行った. 2.研究内容 車両に搭載されている部品の中で特に重いものがモー 駆動輪用スプロケット タである.これまで鈴鹿用の車両には,競技コースの登 り勾配に対応するため,登坂用と高速用の二つのモータ 図 2 試作したモータ正逆転による駆動伝達部分 を搭載していた,しかし二つ搭載していることにより, その分重くなってしまう.この駆動系を図 1 に示す. 初出場のもてぎの競技コースは勾配が小さいため,一 つのモータで十分と考え,モータ一つの駆動系を製作し 正転逆転はトグルスイッチにより切り替え,モータ正転 時が高速用,逆転時が登坂用となるように減速比を求め た. た.その結果,車両全体で 2.28kg 軽量化させることがで 製作にあたり計算したところ,車輪側のスプロケット きた.ただし,レースにおいてはギア比を高速寄りにし の歯数が 100 を超え,その分直径も大きくなる.同時に すぎたためか,速度を上げようとすると,すぐにブレー チェーンも長く,重くなる.そこでチェーンのサイズを カーが落ちてしまった. 今まで使っていた 35 から 25 に変更した.このチェーン 今回,もてぎ用の改良をふまえ鈴鹿用も一つのモータ は 35 よりピッチが小さく軽いため,チェーンラインが だけで登坂用,高速用を両立できる駆動系を考えた.方 二本に増えても以前より軽くすることができる.なお, 法としてはモータの正転,逆転を利用するものである. 使用するモータはもてぎのレースで使ったマクソン製の 車両の進行方向は一方向であるため,これまでモータの RE50(減速比 4.3:1)である.試作したモータ正逆転 逆転側は用いていなかった.そこで,チェーンラインを による駆動伝達部分を図 2 に示す. 一列追加し,モータ正転時にはモータの軸に直接取り付 3.まとめ けているスプロケットのチェーンラインが駆動し動力を 以前の鈴鹿用の駆動系と今回の新駆動系の質量を計 伝え,モータ逆転時は一段歯車を介したもう一方のチェ 算すると,旧駆動系が 5303g に対し新駆動系は設計上 ーンラインにより駆動する.どちらも一方が駆動してい 3422g となる.よっておよそ 1881g 車両全体の質量を軽 る際,もう一方は車輪側のスプロケットに取り付けたフ くでき,38kg であった車両を 36.119kg にすることがで リーホイールにより,空転する仕組みである.モータの きる.
© Copyright 2026 Paperzz