力学1
木曜日3・4限
4・5・6クラス
L201
8回目
相対運動(p.74)
z
z
慣性系(O系)においてはニュートンの運動方程式が成り立つ
慣性系に対して相対的に運動している乗物に乗っている人が,
その乗物内の物体の力学を考える
z
z
z
乗物に乗っている人の目線(O’系)で考えるほうが都合がよい
地球も自転しているため,時間が長く,広い空間で生じる運動では,地球
の自転による力を受ける
相対的な座標を考える→座標系の変換が必要になる
並進座標系における運動方程式(p.75)
z
原点をOとするx,y,zの座標系が慣性系とする
z
z
これをO系,静止系とよぶ→運動方程式が成り立つ
原点をO’として,x,y,zに平行なx’,y’,z’軸を持つような座標系
z
z
O’の座標は,Oの座標から見たら適当な運動をする
下図のO’を並進座標系という,以後はO’系と呼ぶことにする
z’
こちらが
慣性系
運動の法則が成
り立つ
(動かない)
P
z
r’
r
y’
y
O
r0
x
O’
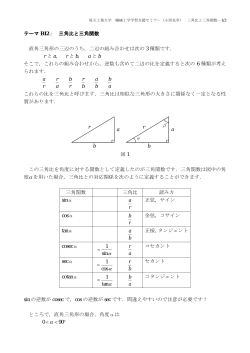
x‘
観察する人の
場所
(動く:移動+
回転も)
並進座標系における運動方程式
z
原点OからみたときのO’の位置ベクトルをr0とする
z
z
O’からみたPの位置ベクトルをr’とする.
z
z
r0(x0,y0,z0)は時間とともに変化する
r’=(x’,y’,z’)
OからみたPの位置ベクトルrはr=r’+r0となる
x = x ′ + x 0 , y = y′ + y 0 , z = z′ + z 0
z’ P
z
r’
r
O
y
r0
x
O’
y’
x‘
並進座標系における運動方程式
z
O系は慣性系のため,質点に働く力をFとすると,運動方程式
が成り立つ
m&r& = F
z
O’における位置ベクトルr’については,加速度を計算して
z
O’における運動方程式を求める
&r& = &r&′ + &r&0
m(&r&′ + &r&0 ) = F
m&r&′ = F − m&r&0
z
実際の力のほかに見かけの力が
働いている( − mr
&& を慣性力という)
0
z’ P
z
r’
r
O
y
r0
x
O’
y’
x‘
並進座標系における運動方程式
z
O’系が &r&0 = a で等加速度運動をしているとき
z
z
慣性力は-maとなり,時間によらない一定の力になる
O’系がv=(vx,vy,xz)で等速度運動をしているとき
z
z
加速度は0なので,慣性力は0になる
その際のO’は慣性系になる(運動方程式が成り立つ)
x = x ′ + v x t , y = y′ + v y t , z = z′ + v z t
z
z
ガリレイ変換という
ニュートンの運動方程式は
ガリレイ変換でも形が変わらない
z’ P
z
r’
r
O
y
r0
x
O’
y’
x‘
例1 上昇するエレベータ中の単振り子
z
一定の加速度aで鉛直方向に上昇しているエレベーター
z
静止系( O系)から見たO’系の加速度 &r&0 は(-a,0,0)
z
通常の単振り子の問題で見かけ上,
重力加速度がgからg+aに変わった
z
y’
O’
a
m&x&′ = mg − T cos ϕ + ma
m&y&′ = −T sin ϕ
ϕ
l
T
微小振動の周期
l
T = 2π
g+a
X’
mg
例2 単振動する台につるされた単振り子
z
z
z
z
水平面上を単振動する台を考える
静止系をO,台の一点O’から振り子がつるされている
O’はOの周りを振幅B,角振動数ω0で単振動する
静止系から見たO’系の座標は
O’
x 0 = 0, y 0 = B cos ω0 t
z
y’
運動方程式は,r’=r0+rより
ϕ
l
T
m&x&′ = mg − T cos ϕ
m&y&′ = −T sin ϕ + mω B cos ω0 t
2
0
X’
mg
例2 単振動する台につるされた単振り子
z
O’における振り子の座標は,糸の長さと,糸がx’軸となす角度
によって,
x ′ = l cos ϕ, y′ = l sin ϕ
z
時間で2回微分する
x& ′ = −l(sin ϕ)ϕ&
y& ′ = l(cos ϕ)ϕ&
&&
&x&′ = −l(cos ϕ)ϕ& 2 − l(sin ϕ)ϕ
&&
&y&′ = −l(sin ϕ)ϕ& 2 + l(cos ϕ)ϕ
O’
y’
ϕ
l
T
X’
mg
例2 単振動する台につるされた単振り子
z
運動方程式から張力Tを消去する
m(&x&′ sin ϕ − &y&′ cos ϕ) = mg sin ϕ − mω02 B cos ω0 t cos ϕ
z
さらに,
&x&′, &y&′ を代入して整理する
ω02 B
g
&& = − sin ϕ +
ϕ
cos ω0 t cos ϕ
l
l
z
O’
y’
ϕ
微小振動の場合,
ω02 B
g
&& = − ϕ +
ϕ
cos ω0 t , (sin ϕ ≅ ϕ, cos ϕ = 1)
l
l
l
T
X’
m
g
2次元の回転座標系(p.77)
z
z
点Oを原点とするx,y,zの座標系(O系あるいは静止系)
同じ点Oを原点として,z’軸は共通,x’,y’軸がxy平面内で回転
する座標系をO’系とする
z
z
z
O’を回転座標系という
z’はzと共通なので,(x,y)と(x’,y’)の関係について考える
O’は角速度ωの等速回転運動を行う(t=0でx’はxと一致) Z,Z’
O j’
i
i’
x
y’
j
y
x’
2次元の回転座標系(p.77)
z
z
回転する単位ベクトルの時間微分
軸に沿って,長さが1のベクトルiとjを考える
z
z
z
同様にx’y’軸に沿うものをi’,j’とする
時間微分すると以下の関係を得る
長さが1ということを利用している
&i = 0, &j = 0
&i′ = ωj′, &j′ = −ωi′
&i&′ = −ω2 i′, &j&′ = −ω2 j′
a=-ω2i’
j’
j
v=ωj’
i’
z
O’系の単位ベクトルは時間によって
変化する
O
ω
1
i
2次元の回転座標系(p.78)
z
&i = 0, &j = 0
&i′ = ωj′, &j′ = −ωi′
O’系の位置ベクトルをrで表す
r = x ′i′ + y′j′
z
&i&′ = −ω2 i′, &j&′ = −ω2 j′
時間で2回微分する
r& = x& ′i′ + y& ′j′ + x ′&i′ + y′&j′
&r& = &x&′i′ + &y&′j′ + 2 x& ′&i′ + y& ′&j′ + x′&i&′ + y′&j&′
(
z
)
単位ベクトルの微分の関係から
&r& = &x&′i′ + &y&′j′ + 2ω(x& ′j′ − y& ′i′) − ω2 (x ′i′ + y′j′)
2次元の回転座標系(p.79)
z
位置ベクトルrの時間による2回微分に対して質量mをかけると,
質点に働く力F( O’系において観察される)に等しくなる
F = m&r&
{
}
= m(&x&′ − 2ωy& ′ − ω x ′)i′ + m(&y&′ + 2ωx& ′ − ω y′)j′
2
′
′
′
′
′
′
′
&
&
&
&
&
&
= m x i + yj + 2ω(x j − y i ) − ω (x ′i′ + y′j′)
2
z
2
O’系における運動方程式は以下のとおりとなる
m&x&′ = Fx′ + 2mωy& ′ + mω2 x′
ω3
m&y&′ = Fy′ − 21
m2
x& ′ + mω2 y′
123
コリオリ力
遠心力
2次元の回転座標系(p.79)
z
運動方程式から,遠心力は原点Oから質点の位置Pへ向かう
z
z
回転する座標では,実際に働く力以外に,コリオリ力と遠心力と
いう見かけの力が加わると考える
z
z
O’系で静止している質点にも加わる
回転する座標系に対しても,これらの力を考慮すれば,運動の法則が成
り立つともいえる
コリオリ力と遠心力は等速円運動の速度,加速度と関係してい
る
円すい振り子の周期(p.80)
z
円すい振り子の周期を考える
z
z
z
一端を固定し,他端におもりをつるす
水平面内で等速円運動させる
円運動の中心Oとおもりを結ぶ直線をx’軸と考える
z
z
おもりには重力mg,糸の張力T,遠心力mω2rが働く
これらの力の釣り合いを考える
T cos θ = mg
T sin θ = mω r
2
z
コリオリ力は振り子がx’で移動してい
ないために生じない
h
l
θ
r
O
X’
円すい振り子の周期(p.81)
z
T cos θ = mg, T sin θ = mω2 r の関係からTを消去
ω2 r
tan θ =
g
z
Tanθ=r/hより,
r ω2 r
tan θ = =
h
g
g
ω=
h
T=
2π
h
= 2π
ω
g
h
l
θ
r
O
X’
ベクトル積の定義(p.81)
z
ここで,新たにベクトル積という考え方を導入する
z
ベクトル積は内積・スカラー積(A・B)と違って,ベクトルを作る
C = A×B
C = (A y Bz − A z B y , A z B x − A x Bz , A x B y − A y B x )
z
A×BとB×Aを比較すると
B × A = (B y A z − Bz A y , Bz A x − B x A z , B x A y − B y A x )
= −A × B
z
同じベクトルどうしのベクトル積は0になる
A × A = (A y A z − A z A y , A z A x − A x A z , A x A y − A y A x )
=0
ベクトル積の例(p.81)
z
例となるベクトルA,B,Cを考える
A = (A,0,0), B = (B cos θ, B sin θ,0)
C = (0,0, AB sin θ)
z
ベクトル積はAとBが作るモーメントをあらわす
z
C
Bsinθ
A
x
y
θ
B
コリオリ力と角速度ベクトル(p.82)
z
各成分が回転軸(図はz軸)の角速度ωに等しいベクトル
z
z
図の角速度ベクトルはω=(0,0,ω)
大きさ軸の角速度で,右ねじが進む方向を持つ
z
O’系(x’y’系)で見た質点の速度をv’とする
z
v′ = ( x& ′, y& ′, z& ′)
ω = (ωx , ωy , ωz ) = (0,0, ω)
このときコリオリ力は 2m(v′ × ω )
z,z’
ω
y’
A
で得られる
ω
x
ω
x’
B
y
コリオリ力と角速度ベクトル(p.83)
z
コリオリ力の式
2m(v′ × ω ) にベクトルを入れて計算
2m(v′ × ω ) = 2m( y& ′ωz − z& ′ωy , z& ′ωx − x& ′ωz , x& ′ωy − y& ′ωx )
{
{ {
{
0
0
0
0
= (2my& ′ωz ,−2mx& ′ωz ,0)
z
z,z’
座標の微分で得られたコリオリ力が得られる
ω
y’
A
ω
x
ω
x’
B
y
コリオリ力の向き(p.83)
z
計算したコリオリ力と速度ベクトルの内積を計算
2m( y& ′ωz − z& ′ωy , z& ′ωx − x& ′ωz , x& ′ωy − y& ′ωx )と( x& ′, y& ′, z& ′)の内積
= 2m( x& ′y& ′ωz − x& ′z& ′ωy + y& ′z& ′ωx − x& ′y& ′ωz + x& ′z& ′ωy − y& ′z& ′ωx )
=0
z
コリオリ力はO’系での速度と常に直交(角度が90度)する
© Copyright 2026 Paperzz