ナノ多孔体ガラスに閉じ込めた 4 He の超流動
小林 利章
電気通信大学大学院 電気通信学研究科
博士(理学)の学位申請論文
2011 年 3 月
ナノ多孔体ガラスに閉じ込めた 4 He の超流動
博士論文審査委員会
主査
鈴木 勝
教授
委員
浅井 吉蔵 教授
委員
黒木 和彦 教授
委員
大淵 泰司 准教授
委員
中村 仁
准教授
著作権所有者
小林 利章
2011 年
Superfluidity of 4 He Confined in a Nano-porous Glass
KOBAYASHI Toshiaki
Abstract
4
He confined in nano-porous media has attracted attention. Recently, Yamamoto
et al. have performed torsional oscillator measurements for 4 He confined in a nanoporous glass, Gelsil. The superfluid onset temperature TC is suppressed at 1.4 K
under saturated vapor pressure (SVP), while the specific heat takes a maximum at the
temperature higher than TC . This suggests that the separation between superfluidity
and Bose-Einstein condensate (BEC) occurs in a Gelsil glass and that nano-scale
BECs are localized in pore. It is of great interest to clarify the properties of the
superfluidity of 4 He confined in Gelsil. Thus motivated, I carried out ultrasound
measurements for a study on 4 He confined in Gelsil, which was the same batch as
used in the previous torsional oscillator measurements.
The composition of this thesis is as follows.
In Chapter 1, I introduced the previous work that related to the present study. Yamamoto et al. has performed torsional oscillator measurements for 4 He confined in a
nano-porous glass, Gelsil, and found a strong suppression of superfluidity. This suggests that the separation between superfluidity and Bose-Einstein condensate (BEC)
occurs in Gelsil and that nano-scale BECs are localized in pore. In this chapter, I
also explained the motivation of the present study. For 4 He confined in Gelsil, it
may be expected that the superfluidity depend on time-scale, because it is thought
that the superfluid component is weakly linked. Then, I carried out ultrasonic (MHzfrequency) and torsional oscillator (kHz-frequency) measurements.
In Chapter 2, I explained the experimental technique related to the present study.
Ultrasonic measurements are commonly used. The sound velocity is is connected
to an elastic constant, while the sound attenuation to an internal friction. In the
study of superfluidity for porous media, the sound velocity is also connected to the
decoupling of the superfluid fraction. On the other hand, the the decoupling of the
superfluid fraction is obtained from torsional oscillator measurements.
In Chapter 3, I explained the experimental setup. In particular, I described in
detail the setup of simultaneous ultrasonic and torsional oscillator measurements,
which was first developed in the present study.
In Chapter 4, I explained the present results. TC of ultrasonic measurements is in
good agreement with that of torsional oscillator measurements in the experimental
resolution. In the preset study, I can conclude the superfluidity does not depend on
time-scale, in the same manner as bulk liquid 4 He. Form the present study, it was
made clear that the sound velocity varies due to the relaxation of ultrasound stresses
by a thermal activation mechanism, regardless of whether 4 He in the pore is liquid
or solid. And it was found that the different heat treatment of Gelsil glass affects
both the relaxation and the superfluidity of 4 He in the pore.
In Chapter 5, I summarized the present study.
ナノ多孔体ガラスに閉じ込めた 4 He の超流動
小林 利章
概要
多孔体の孔内のように制限された空間に 4 He を閉じ込めた際,細孔の接続の次元性や
孔径によって 4 He の物性が変化することから,超流動の強い抑制や局所ボーズ凝縮の可
能性などの新しい物理現象に興味が持たれている。多孔体ガラス Gelsil に関して,先行
研究では,ねじれ振り子による測定で孔内の 4 He の超流動が強く抑制されること,比熱
の測定から新しい量子現象の発現が見出されている。特に超流動現象の強い抑制に関し
ては多孔体試料の表面状態に強く依存する現象であることが示唆される。多孔体ガラス
試料の評価は超音波測定による超流動現象の測定を詳細に解析することで行うことが出
来る。本研究では多孔体ガラスである Gelsil ガラスに 4 He を閉じ込め,超音波とねじれ
振り子を組み合わせた手法を用いて,超流動現象の測定と,その孔内に閉じ込めた 4 He
の超流動現象が基板からどのように影響を受けているか,解明することを目的とした。
本論文の構成は次の通りである。
第 1 章では本研究に関連する先行研究を紹介し,本研究で着目した研究課題について
説明を行った。多孔体ガラス Gelsil に関する先行研究では,孔内に閉じ込めた 4 He の超
流動の抑制現象は多孔体内に局所的に発現する BEC 状態(LBEC)によるものであると
説明される。LBEC による超流動現象の観測は観測方法に依存する可能性を指摘し,本
研究の目的として LBEC による超流動の観測方法依存性を明らかにし,LBEC による超
流動が大きく抑制される現象の機構を解明する点であることを述べた。
第 2 章では本研究に関わる実験原理,実験手法について説明した。本研究に関連する
測定手法として超音波測定とねじれ振り子測定について,測定原理の概略並び計測方法に
ついて述べた。超音波測定は音速が弾性定数に依存すること,結晶格子の情報を音速や
吸収の変化から見出すことが出来ることなどから,物性研究に多用される測定方法であ
る。超音波測定により基板の状態を評価し,超流動に与える影響を評価することが可能
である。また 4 He の超流動の測定は,多孔体に閉じ込めた 4 He が超流動転移すると粘性
の消失により基板の振動から離脱し,見かけ上密度の変化が音速に影響を与えるので,音
速変化から超流動を観測することが可能である。本研究は同様に振動から離脱する 4 He
を検出することで超流動を観測するねじれ振り子測定装置に,超音波測定の準備を行っ
た多孔体ガラス試料を適用することで,両測定を同時刻に行うことができる測定手法を
開発した。この手法により 4 He 超流動の詳細な測定を行い,超流動の観測方法依存性と
基板が超流動現象に与える影響を明らかにすることが可能となった。
第 3 章においては,本研究において行った実験の準備,および実験装置について述べ
た。特に新規に開発したねじれ振り子と超音波測定の同時測定装置に関してはその具体
的な制作方法を説明した。ねじれ振り子と超音波測定の同時測定装置は,ねじれ振り子
の試料容器に格納できる超音波測定試料の作製と,振り子の共振に影響を与えることな
く超音波信号を外に取り出す構造に特色がある。
第 4 章においては,実験の結果を説明し,それに基づき議論を行った。多孔体ガラス
Gelsil の中に閉じ込めた 4 He の超流動に関して,音速変化とねじれ振り子による測定か
ら圧力温度相図を詳細に確定した。同時測定の結果,多孔体ガラス Gelsil 中の超流動の
観測に観測方法依存性は認められなかった。また音速の温度依存性の解析により,4 He
を閉じ込めた多孔体の音速変化を,ガラス固有の音速変化と音波の緩和現象の寄与で説
明出来ることを明らかにした。音波の緩和現象は 4 He の不活性層が起源であり,準備段
階での熱処理方法が異なる試料を比較することで,不活性層は熱処理によって変化する
表面ポテンシャルの影響を強く受けていることを示した。また緩和現象は超流動の抑制
現象に強く関与している可能性を指摘した。超流動の抑制現象と音波の緩和現象の関連
を明らかにし,超流動の抑制現象は,表面ポテンシャルの影響を強く受けた不活性層が影
響を与えている可能性を指摘した。
第 5 章ではこれら本研究の結論をまとめた。
また本研究の 4 He を吸着させた Gelsil のねじれ振り子と超音波の同時測定において,
吸着 4 He と Gelsil 基板との間のスリップ現象が観測されたので,付録としてその現象の
詳細を説明した。
以上,本論文では,ナノ多孔体ガラス Gelsil の細孔内に閉じ込めた 4 He に関して,加
熱処理の条件が異なる Gelsil 試料を用い,新しい測定手法であるねじれ振り子と超音波
測定の同時測定,および音速測定の結果を比較し,その結果を報告した。この研究により
制限された空間に置かれた 4 He の超流動現象について,その基板の状態が超流動に影響
する機構の一端を明らかにできた。
目次
第1章
序論
1
1.1
はじめに . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1
1.2
4
He の特性と超流動 . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1
1.3
多孔体中で抑制される超流動現象 . . . . . . . . . . . . . . . . . . . . .
4
1.4
本研究の目的 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8
1.5
本論文の構成 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
10
実験理論
13
2.1
超音波による超流動測定 . . . . . . . . . . . . . . . . . . . . . . . . . .
13
2.2
パルスエコー法による音速測定 . . . . . . . . . . . . . . . . . . . . . .
14
2.3
共鳴法による音速測定 . . . . . . . . . . . . . . . . . . . . . . . . . . .
19
2.4
ねじれ振り子による測定 . . . . . . . . . . . . . . . . . . . . . . . . . .
21
2.5
静電容量型圧力計を用いた圧力測定 . . . . . . . . . . . . . . . . . . . .
23
実験準備
27
3.1
多孔体試料 Gelsil . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
27
3.2
超音波測定試料の準備 . . . . . . . . . . . . . . . . . . . . . . . . . . .
28
3.3
高圧試料容器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
31
3.4
超音波ねじれ振り子同時測定装置 . . . . . . . . . . . . . . . . . . . . .
34
3.5
温度の制御 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
39
3.6
試料ガスの導入と多孔体試料の孔内の状態 . . . . . . . . . . . . . . . .
42
結果と議論
47
第2章
第3章
第4章
4.1
4.2
超音波とねじれ振り子の同時測定装置 . . . . . . . . . . . . . . . . . . .
4
同時測定による多孔質ガラス Gelsil 細孔中の He の超流動の観測 . . . .
47
50
i
目次
4.3
共鳴法による音速測定 . . . . . . . . . . . . . . . . . . . . . . . . . . .
58
4.4
音速測定による多孔質ガラス Gelsil 細孔中の 4 He の超流動の観測 . . . .
63
4.5
細孔内の 4 He の超流動と試料状態依存性 . . . . . . . . . . . . . . . . .
72
第5章
結論
77
付録 A
圧電現象と圧電体の振動
81
A.1
圧電現象とは . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
81
A.2
異種現象間の結合
A.3
圧電基本式 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
84
A.4
圧電体の振動 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
84
試料内を伝播する音波
89
固体中を伝播する超音波 . . . . . . . . . . . . . . . . . . . . . . . . . .
89
音波の共鳴状態の解析
95
C.1
試料内を往復する超音波 . . . . . . . . . . . . . . . . . . . . . . . . . .
95
C.2
共振カーブの位相回りの補正
付録 B
B.1
付録 C
付録 D
ヘリウム吸着膜のスリップ現象
. . . . . . . . . . . . . . . . . . . . . . . 99
103
D.1
超音波測定による He 吸着膜の摩擦の観測 . . . . . . . . . . . . . . . . . 103
D.2
Gelsil 基板上の 4 He のスリップの観測 . . . . . . . . . . . . . . . . . . 104
参考文献
ii
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
107
図目次
1.1
4
He の P-T 相図 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2
1.2
中性子非弾性散乱実験で得られた 4 He の素励起分散 . . . . . . . . . . .
5
1.3
4
多孔質 Vycor ガラス中の He 相図 . . . . . . . . . . . . . . . . . . . .
4
6
1.4
Gelsil 中の He 相図 . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7
1.5
LBEC 状態の模式図 . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8
1.6
Glyde らの中性子非弾性散乱の測定 . . . . . . . . . . . . . . . . . . . .
9
2.1
音速変化と超流動観測 . . . . . . . . . . . . . . . . . . . . . . . . . . .
14
2.2
パルスエコー法の超音波測定試料 . . . . . . . . . . . . . . . . . . . . .
15
2.3
試料を透過した超音波パルスの例 . . . . . . . . . . . . . . . . . . . . .
15
2.4
PSD 検波法ブロックダイヤグラム . . . . . . . . . . . . . . . . . . . . . 16
2.5
試料内に励起される定在波 . . . . . . . . . . . . . . . . . . . . . . . . .
19
2.6
ねじれ振り子の概略図 . . . . . . . . . . . . . . . . . . . . . . . . . . .
21
2.7
ねじれ振り子の共振周波数と超流動 . . . . . . . . . . . . . . . . . . . .
23
2.8
静電容量型圧力計の構造 . . . . . . . . . . . . . . . . . . . . . . . . . .
24
3.1
Gelsil 試料 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
3.2
Gelsil 試料(超音波測定) . . . . . . . . . . . . . . . . . . . . . . . . . 29
3.3
LiNbO3 超音波振動子 . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
3.4
パルスエコー法の測定ブロックダイヤグラム . . . . . . . . . . . . . . .
30
3.5
共鳴法測定ダイヤグラム . . . . . . . . . . . . . . . . . . . . . . . . . .
31
3.6
高圧試料容器の設計 . . . . . . . . . . . . . . . . . . . . . . . . . . . .
32
3.7
電極導入ポートの製作 . . . . . . . . . . . . . . . . . . . . . . . . . . .
33
3.8
ねじれ振り子と音速の同時測定装置 . . . . . . . . . . . . . . . . . . . .
35
3.9
同時測定に用いた同時測定用超音波試料 . . . . . . . . . . . . . . . . . .
36
iii
図目次
3.10
同時測定に用いた同時測定用ねじれ振り子 . . . . . . . . . . . . . . . .
37
3.11
同時測定に用いた同時測定用ねじれ振り子の設計 . . . . . . . . . . . . .
38
3.12
ねじれ振り子の固定電極 . . . . . . . . . . . . . . . . . . . . . . . . . .
38
3.13
ねじれ振り子測定のブロックダイヤグラム . . . . . . . . . . . . . . . .
39
3.14
3
He - He 希釈冷凍機 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
3.15
4
He 導入時の孔内の様子 . . . . . . . . . . . . . . . . . . . . . . . . . . 43
3.16
試料ガス導入用 GHS . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.1
Gelsil 試料の共鳴曲線 . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
4.2
Gelsil 試料を透過した音波信号 . . . . . . . . . . . . . . . . . . . . . . 50
4.3
同時測定 吸着膜状態での音速とねじれ振り子の共振周波数一覧 . . . . .
51
4.4
同時測定 基板から離脱する吸着膜の質量の割合の比較 . . . . . . . . . .
52
4.5
同時測定 薄膜超流動相図
4.6
同時測定 加圧液体状態での音速とねじれ振り子の共振周波数一覧 . . . .
54
4.7
同時測定 加圧液体状態での音速とねじれ振り子の共振周波数比較 . . . .
55
4.8
同時測定 観測にかかる超流動成分の比較 . . . . . . . . . . . . . . . . .
57
4.9
同時測定 Tc と超流動成分の圧力依存性 . . . . . . . . . . . . . . . . . .
57
4.10
同時測定 薄膜領域の超流動転移温度近傍の拡大 . . . . . . . . . . . . . .
59
4.11
同時測定 加圧液体領域の超流動転移温度近傍の拡大 . . . . . . . . . . .
60
4.12
Gelsil 試料の共鳴曲線 . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
4.13
Gelsil 試料の共鳴曲線 2 . . . . . . . . . . . . . . . . . . . . . . . . . . 61
4.14
静電容量型圧力計の較正 . . . . . . . . . . . . . . . . . . . . . . . . . .
62
4.15
音速測定 空の状態での音速温度依存性 . . . . . . . . . . . . . . . . . .
63
4.16
音速測定 吸着膜状態と加圧状態での音速温度依存性の一覧 . . . . . . . .
64
4.17
音速測定 吸着膜領域での音速温度依存性 . . . . . . . . . . . . . . . . .
67
4.18
音速測定 固化領域での音速温度依存性 . . . . . . . . . . . . . . . . . .
69
4.19
熱処理の異なる試料の音速温度依存性の比較 . . . . . . . . . . . . . . .
70
4.20
フィッティングパラメーターの一覧 . . . . . . . . . . . . . . . . . . . .
71
4.21
加圧液体領域の超流動相図 . . . . . . . . . . . . . . . . . . . . . . . . .
73
4.22
熱処理が異なる試料の超流動性の比較 . . . . . . . . . . . . . . . . . . .
74
4.23
緩和の量と超流動性の関係 . . . . . . . . . . . . . . . . . . . . . . . . .
75
A.1
圧電基本式の諸形式 . . . . . . . . . . . . . . . . . . . . . . . . . . . .
85
A.2
板の縦効果厚み振動 . . . . . . . . . . . . . . . . . . . . . . . . . . . .
85
iv
4
44
. . . . . . . . . . . . . . . . . . . . . . . . . 53
B.1
弾性体に働く応力
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
C.1
位相調節の前後の共鳴カーブ
D.1
ヘクトライト基板上の He 吸着膜の基板振動に対する応答状態図 . . . . . 104
D.2
音波とねじれ振り子測定による Gelsil 基板上の 4 He 吸着膜のスリップ現象 105
D.3
4
. . . . . . . . . . . . . . . . . . . . . . . 101
He 吸着膜のスリップ . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
v
第1章
序論
1.1 はじめに
本研究の実験試料であるヘリウム(4 He)は,水素に次いで 2 番目に軽く宇宙に 2 番目
に多く存在する元素である。とても不活性な物質で化学的に非常に安定である。沸点が
4.2 K と元素中で最も低く,歴史的には一番最後に液化に成功した気体元素である。
非常に低温な液体である液体 4 He は超伝導コイルの冷却や科学研究における寒剤など
実用的な用途に利用される一方,それ自体非常に興味深い物性を持つ物質である。1908
年にオランダのライデン大学のカマリン・オネス(Heike Kamerlingh Onnes)が初めて
液化に成功して以来,これまで広く興味を持たれ研究がなされてきた [1]。特に 1937 年
にピョートル・カピッツァ(Pyotr Leonidovich Kapitsa)により発見された低温におい
て粘性がゼロになる超流動現象は,4 He の物性の中で特に興味深いものである [2]。
1.2
4
4
He の特性と超流動
He の物性について概略を述べる [1, 3]。図 1.1 に低温域の 4 He の P-T 相図を示した。
気体の 4 He は大気圧ではおよそ 4.2 K で液体となり,液化温度周辺ではとても低密度で
低粘度な液体として振る舞う。液体となった 4 He を減圧による冷却で温度をさらに低下
させると,2.2 K 近傍において相転移を起こし比熱が異常な増大を示す。その温度比熱曲
線がギリシャ文字の λ に似ていることからこの転移はラムダ転移と名付けられた。また
この温度以下の領域では通常の流体では起こりえない毛細管中の流動が観測され,これ
が超流動と呼ばれる現象である。25 気圧以下の圧力領域では絶対零度の基底状態におい
ても液体の状態にあり,固化しない。液体 4 He は量子液体として多様な物性を持ち,そ
1
第 1 章 序論
5QNKF
*Gฦࡄࡔ࠲
bcc
L'
M
P
λNK
Pressure
hcp
0QTOCNHNWKF
*GΣ
G
5WRGTHNWKF
*GΤ
L
%
⥃⇇ὐ
.
λ✢
.
/
-Ⲣὐ
᷷ᐲ
- ജ
CVO
C
ICU
Temperature
図 1.1
4
He の P-T 相図 [1]
の特徴的な振る舞いは長年にわたって実験理論両面から研究対象とされてきた。液体の
4
He は絶対零度においても液相にある唯一の元素であり,固相は 25 気圧以上の高圧領域
に存在する。ヘリウムは非常に軽い閉殻の原子であるため,原子のゼロ点振動が無視でき
ず原子間の相互作用も弱いためにおこる振る舞いであり,液体 4 He はこれらの振る舞い
から量子液体とも呼ばれる。極低温では量子統計性が顕著となり,Bose 統計に応じた特
徴的な振る舞いを示す。流体が粘性ゼロで流動する超流動現象は 4 He が Bose-Einstein
凝縮状態(BEC)にあり,原子が基底状態に落ち込むことで発現する現象であると考え
られている。
4
He の超流動現象は二流体モデルで説明される。ラムダ温度で超流動転移した 4 He は,
全ての 4 He が超流動となるのではなく温度に依存した割合の超流動成分を含んだ混合流
体として振る舞う。超流動密度と常流動密度をそれぞれ ρn と ρs とし,それぞれの速度
場を vn と vs とする。流体全体の密度 ρ と速度場 j はそれぞれの和となり,
ρ = ρn + ρs
j = vn + vs
(1.2.1)
(1.2.2)
と表される。超流動成分 ρs は温度の低下とともに増大し,絶対零度では 4 He の密度全て
に寄与している。超流動流体は散逸を伴わない理想流体として,またエントロピーを伴
わず,粘性無しで流れる。超流動成分の速度場 vs は化学ポテンシャルの勾配によって運
動する。
相図において液相と固相の境界の凝固融解曲線の傾きは,2 K 以下の低温域において
は傾きが非常に小さくなる。凝固融解曲線の傾きは一般に次の Clausius-Clapeyron の関
2
1.2
4
He の特性と超流動
係式で説明される。
(
dP
dT
)
=
m
Sl − Ss
Vl − Vs
(1.2.3)
ここで Sl Ss は液体,固体のエントロピー,Vl Vs は体積を表す。Clausius-Clapeyron の
関係式は凝固融解曲線の傾きがエントロピーの変化と体積変化の比になることを表して
いる。4 He の凝固融解曲線の傾きが小さく,温度に依存しない領域では,固体と超流動液
体の間でモル体積差が小さいので固体と超流動層との間のエントロピー差もゼロに近い
と言える。固体相は秩序を持った小さなエントロピーの状態にあり,この固体と超流動
相との間のエントロピー差が小さいということは超流動 4 He が低エントロピーの秩序を
持った液体であることを示している。
超流動 4 He は 4 He 原子が Bose-Einstein 凝縮(BEC)を起こすことで発現するもので
ある。BEC 状態では凝縮体と呼ばれる,マクロな数の粒子が一つの量子状態を取る状態
にある。London は,このような状態にあるとき,マクロなスケールで単一の波動関数が
記述できるとし,巨視的な波動関数を次式で導入した。
Ψ = Ψ0 exp(iφ(r))
(1.2.4)
ここで φ(r) は r における位相を表す。マクロな数の粒子が一つの量子状態に落ち込み,
粒子間の相関が長距離に渡って保たれているコヒーレントな状態を表す秩序変数である。
超流動密度は粒子の数密度を用いて,波動関数の振幅によって次式で書かれる。
ρs = n0 m = m|Ψ0 |2
(1.2.5)
ここで超流動成分の運動を考える。凝縮体の数密度の時間変化を次のように表す。
∂n0
= −∇(n0 vs )
∂t
(1.2.6)
vs は波動関数の位相を用いて次のように定義した。
vs =
~
∇φ
m
(1.2.7)
ところで,波動関数 Ψ を用いて運動量の流れ j を書き下すと,
j=
~ ∗
(Ψ ∇Ψ − Ψ∇Ψ∗ ) = mn0 vs
2i
(1.2.8)
このように凝縮体の速度場 vs は超流動速度と見ることが出来る。超流動速度は波動関数
の位相の勾配により決定されることが分かる。
3
第 1 章 序論
1.2.1 超流動 4 He の励起量子
4
He の超流動に特徴的な素励起について説明する [1, 3]。液体 4 He の比熱は,0.6 K よ
り低温域ではフォノンの比熱への寄与により T 3 に比例する振る舞いを見せ,それより高
温側ではフォノンに加えて別の励起による寄与が加わる。
{
C=
AT 3
T ≤ 0.6K
AT 3 + B exp [−∆/kB T ] T ≥ 0.6K
(1.2.9)
ここで A と B は比例定数である。∆ は励起のエネルギーギャップであり,この素励起は
ロトンと呼ばれる。
ロトンの存在と分散関係はランダウにより予測がなされ [4, 5],中性子非弾性散乱の実
験により検証された。図 1.2 に Henshaw と Woods が報告した,中性子非弾性散乱実験
より得られた液体 4 He の分散関係を示す [6]。この分散関係は運動量の小さな範囲と大き
な範囲で二つの特徴的な領域に分かれている。運動量の小さな範囲では分散関係は線形
なフォノンで
εp = cp
(1.2.10)
と表され,ここで c は音速である。運動量 p の増加に対して εp は極大を経て,ロトンに
繋がる。ロトンは p = p0 で極小となり,この極小値の高さが ∆ に対応する。ロトンの分
散関係は極小値 p0 の近傍では近似的に
εp = ∆ +
(p − p0 )2
2µ
(1.2.11)
と表され,ここで µ はロトンの有効質量である。液体 4 He の比熱は式 1.2.9 で示したと
おり,高温側にはロトンによる寄与が存在し,その寄与は次式で表される。
2p2 kB (µkB T )1/2 −∆/kB T
Cr = 0
e
(2π)3/2 ρ~3
[
3
∆
+
+
4 kB T
(
∆
kB T
)2 ]
(1.2.12)
1.3 多孔体中で抑制される超流動現象
液体 4 He を細孔内に閉じ込めることにより,超流動転移は抑制され,固化圧は上昇す
ることが期待される。これまでも多くの実験的または理論的研究が行われた。ここでは
多孔質ガラスである Vycor と Gelsil に閉じ込めた液体 4 He の例を説明する。
4
1.3 多孔体中で抑制される超流動現象
図 1.2 中性子非弾性散乱実験で得られた 4 He の素励起分散 [6]
1.3.1 多孔質 Vycor に閉じ込めた 4 He の振る舞い
多孔質 Vycor ガラスに関して,細孔内に閉じ込めた 4 He の相図を図 1.3 に示す [7]。
多孔質 Vycor ガラスは平均孔径 6 nm の細孔がスポンジ状に 3 次元ネットワークを持
つ多孔体試料である。このような空間内に液体 4 He を閉じ込め,ねじれ振り子,超音波
測定などにより超流動及び液相-固相相図が求められた。図 1.3 に示されるように,Vycor
中の 4 He の超流動転移温度はバルクの状態と比較して低温側に移動している。また,同
様に固体に転移する凝固線も低温かつ高圧側に移動している。Vycor に閉じ込めた 4 He
は,固化しにくく,また超流動への転移も抑制された状態にあると言える。固化圧の上
昇は均一核形成の理論で説明される。一般に 4 He は固体の表面を濡らさない。固体基板
の上に乗っている液体 4 He の固化はまず基板から離れたところに固体の核が形成され成
長することで固化が進む。細孔中に 4 He が閉じ込められていると,核の成長が抑制され,
バルクの場合よりも固体の形成には高圧力が必要となり,これが固化圧の上昇として観
測される。また超流動転移温度の低温側への移動は,4 He を狭い空間に閉じ込めた事に
よるサイズ効果である。
また,Beamish らは多孔質 Vycor に閉じ込めた固体 4 He について超音波測定を行い,
1 K 近傍に音波の吸収のピークを観測している。これは結晶欠陥の拡散による,超音波
の緩和現象であると説明されている [11]。
5
第 1 章 序論
bu
lk f
re e
zin
g
Solid
Nomal liquid
bulk
e
図 1.3
λ lin
Superfluid
多孔質 Vycor ガラス中の 4 He 相図 [7]。細実線はバルクの 4 He の相図を示
す。• はフローの測定による超流動転移点。◦ は Bishop ら報告のねじれ振り子測定に
よる超流動転移点 [9]。× と + は Beamish ら報告の超音波測定による超流動転移点
と固化点 [8]。♢ と中点 ♢,2 は,Adams ら報告の定積圧力測定による,融解点と凝
固点,超流動転移点 [10]。
1.3.2 Gelsil 中 4 He の超流動の抑制現象
2004 年,山本らは 3 次元細孔を持つ多孔体ガラス Gelsil を用いてねじれ振り子により
細孔中の薄膜 4 He,および液体 4 He の超流動を測定 [12],2008 年には固化圧 [13],比熱
測定 [14] の報告を行った。
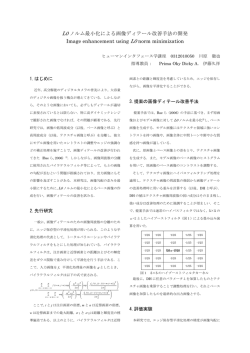
図 1.4 に山本らが報告した相図を示す。超流動転移温度は低圧領域ではおよそ 1.4K で
あり,圧力の増加とともに低温側にシフトする。2 MPa 以上の高圧力領域では大きな圧
力依存性が見られ,超流動が圧力で大きく抑制されている。一方固化圧測定でも固化圧
は低温側にシフトし,1K では 3.5MPa 近傍で固化が観測されている。また,ねじれ振り
子測定,固化圧測定により細孔内の 4 He が液体で存在する事が分かる圧力(3.4 MPa 近
傍) で,絶対零度においても超流動が抑制され,超流動密度に圧力依存性が存在し量子臨
界現象の可能性がが示唆される。
また比熱の測定では,超流動転移温度とは異なる温度領域に比熱の異常を観測してい
る。低圧力領域ではおよそ 2K で観測された比熱異常は圧力の増加とともに低温側に移
6
1.3 多孔体中で抑制される超流動現象
図 1.4
山本ら報告の多孔質ガラス Gelsil 中の 4 He 相図 [12]。超流動の観測はねじれ
振り子によるものである。超流動転移温度より高温側で比熱の異常も観測されている。
動し,超流動転移温度が消失する高圧領域においても 1.5K 近傍に観測されている。比熱
の異常はバルクの λ 線を平行におよそ 0.2 K だけ低温側に移動させた形を示している。
彼らはこの多孔体内の 4 He の超流動と比熱の振る舞いについて,局在したボーズアイ
ンシュタイン凝縮の状態 (Localized Bose-Einstein Condensate, LBEC) によるものと
して説明している。これは多孔体中に在する液体 4 He の一部がボーズ凝縮(BEC)を起
こしている状態である。この状態を模式的に描いたものを図 1.5 にしめす。高温側で観
測された比熱の異常は,多孔体中ナノメータースケールで BEC 凝縮体の形成が始まっ
たことによる。比熱の異常が観測された温度において多孔体中で径が広い部分に在する
4
He がまず BEC 凝縮を始め,比熱にピークが観測される。理論的にはランダムなポテン
シャルが BEC 凝縮体の分断を引き起こし超流動を抑制する描像である [15]。多孔体内
では狭い径の箇所の 4 He が凝縮体間の交換を妨げ,ボーズ凝縮体の波動関数の位相の相
関は,各細孔間にはないと考えられる。超流動性が観測されるためには系全体の位相が
確定する必要があるが,このような LBEC 状態では系全体として超流動性が観測されな
い。温度を低下させることでボーズ凝縮体は成長し,ある温度において系全体の凝縮体
の相関が取れマクロなスケールでの超流動として観測される。この状態はねじれ振り子
で観測の超流動転移温度とされる。
この LBEC という描像は,Glyde らのグループによる中性子散乱の実験からも支持さ
れている [16]。中性子非弾性散乱の測定では,エネルギーと運動量が既知の中性子線を
7
第 1 章 序論
図 1.5 局所的なボーズ凝縮状態にある 4 He の模式図。まず孔径が広い領域に存在す
る 4 He が BEC 状態に凝縮する。狭い空間に在する 4 He は常流動状態にとどまり,全
体として超流動は抑制されているように振る舞う。
対象に入射し散乱される中性子の運動量とエネルギーを観測することで 4 He 内の励起状
態を直接観測することが出来る。彼らは多孔体試料 Gelsil 中の 4 He に対して中性子非弾
性散乱の測定を行い,ねじれ振り子による測定での超流動転移温度よりも高温で超流動
に特徴的な励起であるロトンを検出した。この励起は固体-液体転移の圧力近傍の高圧下
では消失している。これらの振る舞いから,彼らは超流動転移温度よりも高温側に局所
的な凝縮体が存在することを指摘した。ねじれ振り子測定では観測されなかった超流動
体が中性子の実験で測定されたのは,中性子非弾性散乱の測定ではボーズ凝縮体の波動
関数の位相が確定している必要がなく,凝縮体が存在するとそれに伴う励起が測定され
るからであるとされる。この振る舞いは LBEC の描像を支持するものである。
1.4 本研究の目的
1.4.1 超流動の観測方法依存性の評価
本研究で着目する LBEC が存在するとされる多孔体試料 Gelsil 中の 4 He という系に
関しては,その超流動の測定方法と観測される超流動性との関係は興味深い。多孔体試
料 Gelsil 中の 4 He の超流動の観測は,ねじれ振り子測定が用いられた。ねじれ振り子の
先端の試料容器内の 4 He の超流動成分が試料容器のねじれ振動に追従しないことによる
8
1.4 本研究の目的
図 1.6 Glyde らの Gelsil 中 4 He の中性子非弾性散乱の測定 [16]。低圧,超流動転移
温度より高温で超流動に特徴的な励起であるロトンのピークを観測している。ロトン
は圧力の増加により抑制され,Gelsil 中 4 He が固体になる圧力領域で消失する
ものであり,観測にかかる超流動性は長さに関しては cm オーダーでの超流動秩序,時間
に関しては ms の相関が存在する必要がある。一方,前述の中性子散乱実験で測定される
超流動に特徴的な励起であるロトンの観測では,ねじれ振り子のように系全体にわたる
位相の相関や超流体の存在は必要なく,ミクロなスケールで存在する超流動を検出する
ものである。
本研究では,この LBEC の領域の超流動の観測に,超音波による音速測定とねじれ
振り子測定を同時に行うことができる装置を導入する。超音波測定は物性研究に多用さ
れる測定手法であり,音速と音波の吸収の測定から試料の弾性的な性質を調べる方法で
ある。超音波測定は多孔体中の 4 He の超流動観測においては,超流動成分を音速の変化
として検出する。音波の波長から観測にかかる超流動成分の長さに関するスケールは数
100µm オーダー,時間に関しては µs の相関が測定される。この方法ではねじれ振り子
より短い長さと時間スケールで細孔内にミクロに分布する超流動成分を観測することが
できる。また同一試料のねじれ振り子と超音波測定を同時刻で行うことで超流動性の観
測の観測方法での依存性を詳細に明らかにでき,多孔体ガラス Gelsil に閉じ込めた 4 He
の LBEC 状態に関する新たな知見を得ることができると期待できる。
9
第 1 章 序論
1.4.2 超音波測定による基板評価と超流動性の関連の評価
多孔体ガラス Gelsil に閉じ込めた液体 4 He の超流動性では,山本らの報告によると高
圧下において非常に大きな超流動の抑制が観測されている。この振る舞いは多孔体の孔
径分布が存在することにより狭いところの超流動性が強く抑制されるものであるとされ
るが,基板の状態に強く依存する振る舞いである可能性が高い。この LBEC に関連する
強い超流動性の抑制の起源を明らかにするために,本研究では基板の評価を同時に行い
超流動と基板の状態との関連を明らかにする。超音波測定では基板となるガラスの物性
変化も同時に捉えることができるので,基板評価により超流動に基板が与える影響を明
らかにできることが期待される。
1.5 本論文の構成
第 2 章では本研究に関わる実験原理,実験手法について説明した。本研究に関連する
測定手法として超音波測定とねじれ振り子測定について測定原理の概略ならび計測方法
について述べた。超音波測定は音速が弾性定数に依存すること,結晶格子の情報を音速
や吸収の変化から見出すことができることなどから物性研究に多用される測定方法であ
る。超音波測定により基板の状態を評価し,超流動に与える影響を評価することが可能
である。また液体 4 He の超流動の測定は,多孔体に閉じ込めた液体 4 He が超流動転移す
ると粘性の消失により基板の振動に追従せず,見かけ上密度の変化が音速に影響を与え
るので,音速変化から超流動を観測することが可能である。本研究は同様に振動に追従
しない液体 4 He を検出することで超流動を観測するねじれ振り子測定装置に,超音波測
定の準備を行った多孔体ガラス試料を用いることで,両測定を同時刻に行うことができ
る測定手法を開発した。この手法により,試料依存性や温度測定の再現性の問題を解決
して液体 4 He 超流動の詳細な比較を行い,超流動の観測方法が超流動の観測に与える影
響を明らかにすることが可能となった。
第 3 章においては,本研究において行った実験の準備,および実験装置について述べ
た。特に新たに開発したねじれ振り子と超音波測定の同時測定装置に関してはその具体
的な制作方法を説明した。
第 4 章は,議論を大きく二つの部分に分けて述べた。前半は,1)ねじれ振り子と超音
波の同時測定による超流動の観測周波数依存性の確定について議論である。多孔体ガラ
ス Gelsil の中に閉じ込めた液体 4 He の超流動に関して,吸着膜の状態と,加圧液体状態
で音速変化とねじれ振り子による測定を行い,超流動相図を詳細に確定した。同時測定の
10
1.5 本論文の構成
結果から,多孔体ガラス Gelsil 中の超流動の観測では,観測方法依存性は認められなかっ
た。後半では,2)試料の熱処理が超流動性に与える影響についての議論である。多孔体
試料の音速の温度依存性の解析により,液体 4 He を閉じ込めた多孔体の音速変化を,ガ
ラス固有の音速変化と音波の緩和現象の寄与で説明できることを明らかにした。音波の
緩和現象は液体 4 He の不活性層が起源であり,準備段階での熱処理方法が異なる試料を
比較することで,不活性層は熱処理によって変化する表面ポテンシャルの影響を強く受け
ていることを示した。また緩和現象は超流動の抑制現象に強く関与している可能性を指
摘した。超流動の抑制現象と音波の緩和現象の関連を明らかにし,超流動の抑制現象は,
表面ポテンシャルの影響を強く受けた不活性層が影響を与えている可能性を指摘した。
第 5 章では本研究の結論を述べた。
11
第2章
実験理論
2.1 超音波による超流動測定
試料に超音波を透過させ音速と吸収係数を測定する超音波測定は,物性研究の手法の
一つである。一般に試料の音速は弾性定数と密度の関数であり,音速 v は密度 ρ,弾性定
数 C は以下の式で関連付けられる。(付録 B.1 を参照)
√
v=
C
ρ
(2.1.1)
音速変化を測定することにより,弾性定数あるいは密度の変化を測定することが出来る。
多孔体中の液体 4 He が超流動転移すると発生した超流動成分が基板の振動に追従しな
くなり,音速を決定する有効な密度が減少する。それに伴い音速変化に音速上昇が観測
される。有効な密度の変化である音速の変化量は,転移した超流動成分の割合の情報を
持つ。音速の変化量から転移した超流動密度を計算することができる。
2.1.1 超流動転移に伴う音速変化
多孔体中に閉じ込めた液体 4 He が超流動に転移することに伴う音速の変化は,多孔質
体の密度と空孔率,また閉じ込めた液体 4 He の密度により決定される。
超流動転移後の音速は,式 2.1.1 を用いて次式に書ける。
v
u
u
vs = t
C
(
ρsub + αρHe 1 −
s
β ρρHe
)
(2.1.2)
C は試料の弾性定数,ρsub は試料の見かけの密度,ρHe はヘリウムの密度,α は空孔率
である。弾性定数は一定であると仮定する。ここで ρs は超流動転移したヘリウムの密度
13
Sound Velocity
第 2 章 実験理論
ⓨߩ⹜ᢱ
∆v(T)
4Heዉ
ᵹേ
Ᏹᵹേ
ኒᐲߩჇട
Tc
Temperature
図 2.1 音速測定による超流動観測の概略を示す。液体 4 He が孔内に入り有効な密度
に寄与することで空の状態から減少した音速は,超流動成分により有効な密度の減少
が起こり,上昇する振る舞いを示す。
で ρs /ρHe は超流動成分の割合になる。全てのヘリウムが超流動に転移しても,幾何学的
な条件から基板振動から完全に離脱しない成分が残る。係数 β はその幾何学的な条件か
ら決まる定数である。この式で超流動密度 ρs がゼロのときが転移前の音速 v0 に対応し,
次式になる。
√
v0 =
C
ρsub + αρHe
(2.1.3)
試料全体の弾性定数が超流動に転移して変化しないとき,これらから,音速の変化は次の
ように計算できる。
v
∆v u
=u
t
v0
ρ
ρsub + αρHe
) −1
(
ρs
+
αρ
1
−
β
sub
He
ρHe
(2.1.4)
2.2 パルスエコー法による音速測定
超音波測定で音速を測定する手法の一つ,パルスエコー法について説明する。パルス
エコー法は音波の波束を断続的に対象物に入射し,その伝播時間と試料長から音速を求
める測定方法である。測定試料は図 2.2 のように,両端を平行に加工し,超音波信号を
電気信号に相互変換するトランスデューサを接着する。試料の一方から超音波信号の波
束が入射されると,試料の中を音波が伝播し,伝播した時間だけ遅れて検出側トランス
14
2.2 パルスエコー法による音速測定
⊒ାㇱ
Sample ࠻ࡦࠬ࠺ࡘࠨ
L
ฃାㇱ
図 2.2
パルスエコー法で用いる試料の概念図。両端が平行な試料の両面に超音波信号
と電気信号を相互変換する超音波トランスデューサを接着。一方から音波を入射しも
う一方で検出する。
透過時間
Ǎ㨀1
Amp. (mV)
20
0
-20
0
図 2.3
2000
Time (ms)
4000
試料を透過した超音波パルスの例。試料内を音波が透過する時間だけ遅れて音
波が検出される。横軸は超音波入射信号をトリガーとして掃引しているが,実際に試
料に音波が入射する時刻には小さなノイズや混信(クロストーク)が見える。
デューサで検出される(図 2.3)。試料長は既知であるので,伝播に要した時間から音速
の絶対値と音速変化を求めることができる。
パルスエコー法では信号発生器からの信号を分周し,パルスのトリガーとなる同期信
号を生成している。このトリガーを基準にして試料を透過した音波信号を時刻の関数と
して取得する。検出された音波信号と,音波信号が入射した時刻との間の時間差が試料
15
第 2 章 実験理論
SIGNAL
REFERENCE
V2 = A cos (wt)
Power Divider
V3
V1 = cos (wt)
Quadrature Hybrid
=
t)
(w
s
co
Double Balanced Mixer
V4 = sin (wt)
Double Balanced Mixer
V5 = V3 â V2
Low Pass Filter
V6 = V4 â V2
Low Pass Filter
Y
X
図 2.4 PSD 検波法のブロックダイヤグラム
中を音波が進行した時間となる。試料の音速 v は,既知の試料長 L と透過時間 ∆t から
v=
L
∆t
(2.2.1)
となる。実際にはパルスの発生トリガーが発せられてから音波が試料に入射されるまで
にわずかな時間差が生じるが,パルスが発生する際に生じるノイズを波形から読取り,そ
こを基準としてパルスの透過時間を測定することになる。
2.2.1 位相検波法による音速変化の検出
音速の変化に伴いパルスの到達時刻は変化するが,この音波の到達時刻の変化は位相
検波器(Phase Sensitive Detector, PSD)により位相検波を行うことで測定する [17]。
PSD を用いて基準となる参照信号と試料を透過した音波との間の位相のずれを検出する
ことで音速の変化を精度良く測定することができる。試料を伝播した音波信号は信号増
幅器によって増幅され,同周波数の参照信号が乗じられる。信号はローパスフィルター
16
2.2 パルスエコー法による音速測定
により高周波成分を除去され,ボックスカーシステム等により時間平均された振幅が計
測される。
試料に入射される音波の振幅 V1 は,時刻 t 角周波数 ω の関数として
V1 = cos (ωt)
(2.2.2)
となる。
試料の中を伝播する音波は以下のように表すことができる。
( (
)
x)
V2 = A (t, x) cos ω t −
−δ
v
(2.2.3)
ここで x は伝播した距離,v は音速である。δ は試料や回路の条件により発生する位相の
ずれである。
この伝播した音波 V2 を PSD により位相検波しよう。位相検波することで音速の変化
を位相の変化として検出する。基準となる参照信号として,パルスを生成する前の連続
した信号 V1 を利用する。参照信号 V1 から 90 度分配器(Quadrature Hybrid, QH) を
用いて位相が π/2 ずれた 2 つの信号 V3 , V4 を生成する。
V3 = cos (ωt − ϵ)
V4 = sin (ωt − ϵ)
(2.2.4)
(2.2.5)
ここで ϵ は QH を通したことで発生する位相の変化である。
試料を伝播した信号 V2 は必要に応じて増幅され,分配器 (Power Divider, PD) で 2
つに分割される。分割した音波信号を QH を通した参照信号とダブル・バランス・ミキ
サー(Double Balanced Mixer, DBM) でそれぞれ乗じる。参照信号と同位相の V3 と乗
じた信号を V5 ,参照信号と π/2 位相がずれている V4 と乗じた信号を V6 とすると
( (
)
x)
V3 × V2 = A (t, x) cos (ωt − ϵ) cos ω t −
−δ
v
(
(
)
( ωx
))
1
ωx
= A (t, x) cos 2ωt −
− ϵ − δ + cos
−ϵ+δ
2
v
v
V5 =
( (
)
x)
V4 × V2 = A (t, x) sin (ωt − ϵ) cos ω t −
−δ
v
( (
)
( ωx
))
ωx
1
− ϵ − δ + sin
−ϵ+δ
= A (t, x) sin 2ωt −
2
v
v
(2.2.6)
V6 =
(2.2.7)
これら参照信号を乗じた信号をローパスフィルター(Low Pass Filter, LPF) に通し,
高周波成分を除去すると次のような位相差 90 度の 2 つの直流信号を得る。これら LPF
17
第 2 章 実験理論
を通した信号はボックスカーアベレージャーにより,パルス部分を時間平均された信号
として取得される。
( ωx )
1
X = A (t, x) cos
2
v
( ωx )
1
Y = A (t, x) sin
2
v
(2.2.8)
(2.2.9)
これらの信号は伝播した音波の振幅と,参照信号を基準としたときの位相のずれの情
報を持つ。音波の振幅 A と,位相差 θ は次式となる。
√
1
A = X 2 + Y 2 = A(t, x)
( )2
Y
ωx
θ = tan−1
=
X
v
(2.2.10)
(2.2.11)
ここで位相差 θ は音速の関数となっている。音速が変化するとパルスの位相が基準とな
る参照信号に対して変化し,X, Y の変化となって現れることがわかる。位相の変化から
音速の変化を測定するには音波の周波数 ω を一定として,位相差 θ を一定に保つように
基準信号の位相を変化させ,その位相を音速変化に換算する方法と,基準信号の位相はそ
のままで音波の周波数を変化させて位相差を一定に保ち,周波数変化から音速変化に換
算する方法とがある。
定周波数による音速測定
基準信号との位相差 θ は音速の関数であるので,音速 v0 から v1 に変化したとき位相
差は式 2.2.11 から次のようになる。
θ0 =
ω0 x
v0
(2.2.12)
これは基準となる参照信号と比較したときの位相差であるので,DBM で乗される参照
信号を音波とは別の信号発生器から生成し,任意に相対的な位相を変化させることで位
相差を常にゼロとなるように追跡する。音波の音速変化は変化させた位相の変化として
測定されることになる。この方法では大きな音速の変化を追跡できる特徴がある。位相
の変化と音速の変化の間の直線性について,信号強度が変化した際には留意する必要が
ある。
定位相による音速測定
位相差の信号は音波の周波数の関数でもあるので,位相差が一定の値になるように周
波数を変化させることで音速が追跡できる。DBM の周波数分解能の方が位相の分解能よ
18
2.3 共鳴法による音速測定
excitation
detection
Excited standing wave in Vycor glass sample
図 2.5
試料内に励起される定在波
り大きいので,定周波数による音速測定と比較して定位相による音速測定の方が高分解
能で測定出来るという特徴を持つ。ただし大きく音速が変化する条件下では周波数が大
きく変化し,測定システムでの信号の位相回り,トランスデューサの特性に注意しなけれ
ばならない。
2.3 共鳴法による音速測定
共鳴法は超音波測定の手法の一つで,物体固有の共鳴周波数を測定することで音速の
変化を追跡するものである。測定原理は,まず試料の片面から連続した超音波を入射し,
もう片面において試料を伝搬した超音波を検出する。入射する超音波の周波数が試料に
固有の振動数に共鳴すると図 2.5 のように試料内に定在波が励起され,それが検出側超音
波振動子において検出される。この測定法では検出可能な超音波の振幅が非常に微少振
幅まで精度良く対応できるため,パルスエコー法では測定の難しい低振幅での測定や,試
料が薄い時に適用される。その共鳴周波数と試料の音速との関係は以下の式で表される。
fn =
v
n
2L
(2.3.1)
ここで v は試料中の音速,L は試料長,n は自然数である。音速の変化は共鳴周波数の変
化から次式で求められる。
∆f
∆v
=
f
v
(2.3.2)
2.3.1 共鳴周波数の測定
共鳴周波数は以下のように求めることが出来る。試料内に連続波が入射されている時,
励起外力を基準にした検出波の 0◦ ,90◦ 成分を測定すると,共鳴周波数においては 0◦ 成
19
第 2 章 実験理論
分がゼロになる。(C.1 に詳細な計算を示した。) この性質を利用し,共鳴周波数近傍に
おいて共鳴点からのずれを測定された 0◦ 成分より計算し,励起周波数にフィードバック
することで共鳴周波数にロックする。このようにして共鳴周波数を測定し,音速の変化
を測定する。
音速の絶対値は,励起信号の周波数を連続して変化させて複数の定在波を検出し,定在
波の周波数間隔を測定することで求められる。共鳴周波数の間隔と試料長から音速を次
のように計算する。式 2.3.1 を用いると共鳴周波数の間隔 ∆f と試料長 L から次式で音
速を求めることが出来る。
∆v = 2L∆f
(2.3.3)
2.3.2 振幅の見積もり
試料内に励起されている定在波の振幅は,検出側超音波振動子から検出される電圧か
ら以下のように求めた。(付録 A を参照)
厚さ t の超音波振動子の端面速度 u̇( 2t ) と圧電で生じる電流 Ip との関係は次式で求め
られる。
2eS
Ip =
u̇
t
( )
t
2
(2.3.4)
ここで S は電極の面積,e は圧電定数である。振動数 ω の時
1
u=
u̇
jω
( )
t
t
u
=
Ip
2
2jωeS
(2.3.5)
(2.3.6)
となる。Ip は超音波振動子から発振する電圧 Vout と測定器の終端抵抗 R から求める。
振動子の最大変位を Au ,速度を vu とすると,
t Vout
2ωeS R
= Au × ω
Au =
(2.3.7)
vu
(2.3.8)
ロックインアンプからの出力は時間平均された実効値で得られるので,振幅を求める際
は
20
√
2 倍したピーク間電圧値を用いて計算する。
2.4 ねじれ振り子による測定
$G%W6QTUKQP4QF
(KNNKPI.KPG
&TKXG
UCORNG
&GVGEV
図 2.6 ねじれ振り子の概略
2.4 ねじれ振り子による測定
本研究に用いたねじれ振り子測定について説明する [18]。4 He の超流動現象の研究に
中心的な役割を果たしたのがねじれ振り子による 4 He の機械的な挙動の測定である。超
流動測定に用いるねじれ振り子装置は Reppy らのグループによって開発されたもので
トーションロッドと呼ばれる金属棒の先端に円盤状の試料容器を取り付けた形状の装置
である(図 2.6) [19]。試料の 4 He はねじれロッドの中を経由し試料容器に導かれる。
ねじれ振り子は,ねじれ方向の周期的な外力を電気的に加え,検出用電極から変位を検
出する。振り子の共振周波数と外力の周期が合致するととねじれ振り子は共振を起こす。
ねじれ振り子の共振振動数はトーションロッドのバネ定数と試料の慣性モーメントの関
数で次式で与えられる。
1
f=
2π
√
k
Icell
(2.4.1)
ここで k はトーションロッドの弾性定数,I は容器の慣性モーメントである。ロッドの弾
性定数 k は,長さが L,内径と外径を di , do ,材料の剪断弾性率が G のねじれロッドで
は次式で求められる。
k=
πG 4
(d − d4i )
32L 0
(2.4.2)
また容器の慣性モーメント I は,密度 ρ,高さ h,半径 r の均質な円筒を仮定すると次
21
第 2 章 実験理論
式で求められる。
I=
1
πρr4 h
2
(2.4.3)
バネ定数は一般に温度に依存するが既知として差し引くことができるので,固有振動周
期の変化から試料容器の慣性モーメントの変化を求めることができる。
振り子を共振させ共振周波数を測定するには,外力に対する変位の位相関係を得る必
要がある。検出した変位を外力に対して位相検波を行うために検出にはロックインアン
プを用いる。ロックインアンプによって励起外力を基準にした振幅のの 0◦ ,90◦ 成分を
測定すると,共振状態においては 0◦ 成分がゼロになる。共振点近傍において,共振から
の周波数のずれを測定された 0◦ 成分より計算し,励起周波数にフィードバックすること
で共振周波数にロックする。このようにして共振周波数を測定し,振り子の慣性モーメ
ントの変化を測定する。また,共振の鋭さを示す Q 値は,共振の半値幅 ∆f と共振周波
数 f0 から,次式で計算される。
Q=
f0
∆f
(2.4.4)
2.4.1 ねじれ振り子による超流動の測定
セル容器の中に液体 4 He を満たすと,試料容器の慣性モーメントに 4 He の質量が寄与
し Icell は増加,共振周波数は低下する。ここで実際に容器の振動に寄与する 4 He は,粘
性により振動に引きずられる粘性侵入長 η の範囲内である。この場合簡単のためセルの
壁間は η より小さく,常流動成分はすべてセルと一体となって運動しているとする。す
なわち,空の状態から比較するとセルの慣性モーメントは液体成分 IHe だけ増加する。
この状態で冷却すると,試料容器内の 4 He が超流動転移することで超流動成分が発生
し,これが非回転状態に落ち込み,容器の振動に追従していた 4 He が振動から離脱して
それが容器の慣性モーメントの減少として観測される。発生する超流動密度を ρs とする
と液体の慣性モーメントは以下のように温度低下とともに減少する。
(
)
ρs (T )
Is (T ) = IHe 1 −
ρ
(2.4.5)
共振周波数はこの慣性モーメントの変化を受けて,Tc 以下で立ち上がり上昇する。超
22
Frequency
2.5 静電容量型圧力計を用いた圧力測定
ⓨߩ࡞
ᘠᕈࡕࡔࡦ࠻
∆F(T)
4Heዉ࡞
ᵹേ
Ᏹᵹേ
Tc
ᘠᕈࡕࡔࡦ࠻
Temperature
図 2.7 ねじれ振り子による超流動観測の概略を示す。4 He の慣性モーメントにより
空の状態から大きく減少した共振周波数は,超流動成分が発生することで慣性モーメ
ントが減少し,上昇する振る舞いを見せる。
流動転移に伴う周波数の変化量は,一次の近似範囲で
)
√
κ
κ
−
Icell + IHe (1 − ρs (T )/ρ)
Icell + IHe
v
√
1
κ u
1
u
(
)
=
t
ρ
(T
)
2π Icell
He
1 + IIcell
1 − sρ
1
∆(T ) =
2π
≃
(√
fcell IHe ρs (T )
2 Icell ρ
(2.4.6)
(2.4.7)
(2.4.8)
となり,発生する超流動密度 ρs (T ) に比例することがわかる。
2.5 静電容量型圧力計を用いた圧力測定
温度圧力相図を求めるためには同時に試料の圧力を測定する必要がある。本実験では
バルクの 4 He の固化圧以上の温度圧力領域で測定を行う必要があるが,この領域では試
料導入キャピラリの中で 4 He が固化し,管路が閉塞する。すると室温部に設置した圧力
計では低温部の試料空間の圧力を知ることはできない。本実験では極低温の箇所に設置
し精度良く圧力を測定することができる圧力計として,Straty と Adams が考案した圧
力によるダイヤフラムの変形を静電容量の変化として読み取る,静電容量型圧力計を製
作し利用した [20]。
23
第 2 章 実験理論
スペーサー
電極
コンデンサーギャップ
ダイヤフラム
試料空間
図 2.8
静電容量型圧力計の構造
2.5.1 静電容量型圧力計の原理
静電容量型圧力計の構造と原理を説明する。図 2.8 は静電容量型圧力計の構造の概略
を示したものである。圧力計本体はサンプルスペースの壁の一部が 1 mm 程度の厚さに
加工され,試料の圧力によって弾性的に変形する金属ダイヤフラムを形成している。ダ
イヤフラムの外側には電極が設置され,ダイヤフラム中心の変位に合わせて移動するよ
うになっている。ダイヤフラムの可動電極に対向する位置に固定電極が設置され,数十
µm 程度の厚さのスペーサーにより,可動電極と固定電極の間にコンデンサーギャップが
形成されている。
ダイヤフラムは内部の圧力を受けて弾性的に変形し,その変形の大きさは圧力の関数
である。円周を固定されたダイヤフラムが圧力 P を受けて変形するとき,中心における
変形量 y は,厚み t,直径 r ,材料のヤング率 E とポアソン比 ν によって次式で計算さ
れ,静電容量圧力計に形成されたコンデンサーギャップの間隔の変化 ∆a と一致する。
y=
3(1 − ν)r4 P
= −∆a
16Et3
(2.5.1)
またこの時,ダイヤフラムにかかる応力は次式となる。
γ=
24
3r2 P
4t2
(2.5.2)
2.5 静電容量型圧力計を用いた圧力測定
実際の測定においては,低温状態で室温部の圧力計と内部の試料空間の間が開通し圧力
媒体(4 He)が移動できる状態で静電容量と圧力の関係を測定し,圧力と静電容量の関数
を得て圧力計に価を付ける校正作業が必要である。なお圧力変化と静電容量の変化の間
には,圧力によるダイヤフラムの変位が十分小さい範囲での近似で,次式の関係がある。
∆C
∆P
=
C
P
(2.5.3)
静電容量型圧力計は,測定装置としての感度を高くするために圧力の変化に対する電
極間隔の変化量の割合が大きいことが望ましい。しかしそのためにはダイヤフラムの厚
さを薄くするか直径を大きくする必要がある。式 2.5.2 から,感度を高めようとダイヤフ
ラムを薄くしたり直径を大きくすることにより,圧力によってダイヤフラムに生じる応
力は大きくなることが分かる。またダイヤフラムを薄くし圧力に対する変形の大きさを
大きくすると,圧力によって固定電極と可動電極が接触する可能性もある。実際の設計
においては,測定に必要な圧力の領域と材料が耐えられる応力(この材料固有の値につい
ては金属材料の特性表で得ることができる),また実験装置に拘束される幾何学的な条件
などを考慮してダイヤフラムの直径と厚みなどを決定し,圧力計を設計することになる。
25
第3章
実験準備
3.1 多孔体試料 Gelsil
本研究で用いた多孔体試料 Gelsil は共同研究者の慶應義塾大学白濱研究室より提供を
受けた物であり,同一ロットの試料について山本らにより比表面積や特性が測定されて
いる [12]。Gelsil は Geltech 社*1 の多孔質高シリカガラス材料であり,シリコンアルコ
キシドを原料に sol-gel 法により作製される。測定に先立ち,多孔質ガラスの表面に付い
た水を除去する目的で,真空ガラス炉内にて加熱処理を行った。実験の進行順に,RUN1
では 150 ◦ C で 1.5 時間,RUN2 では 2.5 時間の真空電気炉での乾燥を行った。
表 3.1 測定に用いた多孔質ガラス試料 Gelsil の諸元
成分
SiO2
平均孔径
2.5 nm
直径
5.2 mm
比表面積
4.87 ×102 m2 /g
音速
∼ 1900 m/s
RUN 1
RUN 2
質量
55.5 mg
51.5 mg
試料長
2.11 mm
1.84 mm
1.5 時間
2.5 時間
熱処理(150◦ C,真空中)
*1
Geltech Co., 3267 Progress Drive Orlando FL 32826 USA.
27
第 3 章 実験準備
図 3.1
本研究に用いた Gelsil 試料
3.2 超音波測定試料の準備
多孔体ガラス Gelsil はサンドペーパーとラッピングペーパーを用いて両端面を平坦に
研磨した。研磨は乾式で行った。研磨後の試料は超音波測定を行うためには,研磨後の両
端面間の平行度が音波の波長の 1/10 以下の精度となるよう研磨する必要がある。RUN1
においては 2.11 mm,RUN2 においては 1.84 mm の厚さに仕上げた。測定後に両端面
間の距離をダイヤルゲージを用いて測定し平行度の確認を行った。今回用いた試料は研
磨後の測定により,∆l = 5 µm 程度の誤差で平行に研磨できていることを確認した。
その後,試料両端に LiNbO3 横波超音波振動子を貼り付けた。接着剤に脱オキシム一
液型 RTV ゴム(信越化学工業,品名 KE44T)をガラス端面に薄く塗布し,固定した。
接着剤の固化を促進するために電気炉内において 80◦ C 前後で固着するまで(1 時間前
後)加熱した。図 3.2 に実際に測定に用いた試料の写真を載せる。
3.2.1 LiNbO3 超音波振動子
本測定では電気信号を振動に変換するために超音波振動子を用いた。超音波振動子は
水晶や今回用いた LiNbO3 など,圧電性を持つ物質を適当な結晶方位にカットしものに
電極を取り付けたもので,圧電効果を利用し超音波の励起,検出に用いられる。圧電効果
とは圧電性結晶に電圧をかけた時に結晶に歪みが生じるもので,本測定ではこの性質を
利用した LiNbO3 の超音波振動子を試料に貼り付けて利用している (付録 A を参照)。超
音波振動子はその厚みにより発生する超音波の周波数帯域が決定される。本測定では基
本波 10MHz の横波超音波振動子を用いている。
28
3.2 超音波測定試料の準備
図 3.2
超音波測定の準備を行った Gelsil 試料。白い部分がガラス部分で, 両端に
LiNbO3 超音波振動子を貼り付けてある。高圧試料容器に金属製ホルダーを設置し,
そこに試料を固定した。
Ag Wire
Au Electrode
図 3.3
本測定で用いた LiNbO3 超音波振動子
超音波振動子は適当な結晶方位と形状にカットされた LiNbO3 に金電極を図のように
スパッタしたものである。電極は結晶を挟むようにスパッタされ,片面から信号を取
れるよう側面に回り込む形で電極が作製されている。振動子には基本波の周波数や縦
波,横波の区別など種類があり適切な超音波振動子を選択し用いた。
29
第 3 章 実験準備
Cryostat
Attenuator
Computer
Gated
Amplifier
sample
Pulse
Generator
G
P
│
I
B
wide-band
Amplifier
PSD
Synthesizer
:NF1944
PD
Frequency
Divider
QH
0°90°
PD
DBM
DBM
LPF
LPF
Delay
Generator
Boxcar System
図 3.4
パルスエコー法の測定ブロックダイヤグラム。信号発生器
3.2.2 超音波測定装置の構成
図 3.4 は本実験に用いたパルスエコー法による測定のブロックダイヤグラムである。測
定系は音波を生成する部分と,音波を検波して音速変化を捉える部分とに分かれている。
信号発生器から出力される正弦波はゲートアンプによって切り出され波束として出力さ
れる。信号は超音波トランスデューサにおいて音波に変換され試料に入射される。試料
を伝播した音波は試料反対面のトランスデューサで検出され,検波回路に導入されて音
速変化を捉える。
図 3.5 に本研究に用いた共鳴法測定系のブロックダイヤグラムを示す。発信器から励
起信号を発信し,励起側超音波振動子により試料内に超音波を入射する。この励起信号
により試料内に定在波を励起する。検出側超音波振動子により試料内を伝搬した音波を
電気信号に変換し,高周波ロックインアンプを利用して検波する。検波の際,励起信号と
同位相の信号を参照信号とし,参照信号との位相差も振幅と同時に測定する。
30
3.3 高圧試料容器
Temperature
controlle
system
Cryostat
ATT.
Sample
RF Lock-in Amplifier
excite signal
Synthesizer
reference signal
GP-IB
Computer
図 3.5
共鳴法による超音波測定ブロックダイヤグラム
3.3 高圧試料容器
超音波測定単独で行った RUN 1 の測定は圧力計を付属した高圧試料容器内で行った。
図 3.6 は実際に測定に用いた試料容器の設計図面である。試料は円筒形の試料容器の中
に固定する。4 He は 25 気圧以上の高圧下で固体となる。この圧力領域で測定を行うため
にはそれ以上の高い圧力で仕込を行い冷却する操作が必要となるので,その高圧に耐え
る容器を用いる必要がある。今回は広い圧力範囲で測定を行うため,以下のように 200
気圧以上の内圧に耐える容器を作製した。試料容器の耐圧設計は,圧力によって部材に
働く応力と材料が耐えられる耐力を比較し,十分な余裕のある安全率を考慮した設計を
行った。また蓋を固定するネジについてもネジに働く引っ張り力に対してねじ山が耐え
ることを材料工学的な計算の上で安全を確認してある。試料容器本体の材質はベリリウ
ム銅を用いた。ベリリウム銅は切削性が良く比較的加工が容易な材料であり,極低温に
おける熱伝導性にも優れている。またベリリウム銅の特製として切削加工後に熱による
析出硬化処理を行うと,ベリリウムが結晶粒界に析出し(時効硬化)硬度,耐力が増す。
これにより高圧に耐える耐力が得られる。測定に用いた容器は,切削加工後に 310◦ C,3
時間の人工時効硬化処理を行った。試料容器の蓋には,測定に用いる信号の同軸線コネ
クタポートが 2 つと,試料のヘリウムを出し入れするためのサンプルポートが 1 つ作製
した。蓋はガスケットとしてインジウムシールを用いた。試料容器の底面にはダイヤフ
ラムを作製し,静電容量圧力計として利用した。多孔質ガラス試料は試料容器の蓋に取
り付けた黄銅の支柱に糸を用いて固定し,試料容器内で動かないよう設置した。図 3.2 は
31
第 3 章 実験準備
図 3.6 高圧試料容器の設計。試料容器はベリリウム銅合金により作製した。
測定に用いた試料を容器蓋に固定した様子である。
3.3.1 同軸線導入ポートの製作
高圧試料容器に電気信号を導入するために,200 気圧以上の圧力でも漏れのない高圧に
耐えるポートを作製した。ポートの製作過程を図 3.7 に示す。コネクターは MMCX を
用い,同軸線は UT20-SS を用いた。高圧試料が外部に漏れ出さぬように製作過程におい
32
3.3 高圧試料容器
(1)
(2)
UT20-SS
Stycast 2850
MMCX 外部電極
Stycast1266
MMCX 内部電極
(3)
(4)
Stycast 2850
試料容器
黄銅製電極ケース
図 3.7
高圧試料容器に信号を導入するためのポートの製作。(1)MMCX の内部電極
と同軸線の心線をハンダ付けした後,Stycast 2850 を用いて気密を確保した。(2)で
は MMCX の外部電極の中に (1) で製作した内部電極と同軸線を固定し,外部電極の
接続のために導線のハンダ付けを行った。(3)試料容器には黄銅で作成した電極ケー
スをあらかじめ銀ロウ付けしておく。(4)で MMCX コネクタと同軸線を試料容器に
固定し,隙間に Stycast 2850 を流し込み気密を確保する。
て工夫したシールを施してある。リークのパスとなる可能性がある同軸線の心線部分に
ついては,コネクタ内で心線がむき出しになっている箇所においてスタイキャストを用
いてシールを行った。また電極を試料容器に固定する際,接着剤のスタイキャストと試
料容器との間の熱膨張率の違いを吸収するため,黄銅を用いた鞘を作製し電極ケースと
して用いた。薄い金属板の弾性により歪みが吸収され,熱収縮に伴うリークを防ぐこと
ができる。このような工夫をすることでヘリウム温度においても 200 気圧以上の耐圧を
持つポートを作製することができる。
33
第 3 章 実験準備
3.3.2 静電容量圧力計の製作
高圧試料容器の底面には切削加工によりダイヤフラムを形成し,ここを静電容量圧力
計として利用できるようにしてある。試料容器のダイヤフラム中央の変位を取り出すた
めにヘソ状の突起を設け,ここに可動電極を接着した。電極の接着には Stycast 2850 を
用いた。電極と本体との絶縁を取るために薄い紙片を挟み込む必要があるが,本実験で
は薬包紙を用いた。電極にはあらかじめハンダ付けによって同軸線を接続しておく。こ
のとき同軸線の外皮が GND に接続しないよう適切に先端を処理しておく。対向する固
定電極も同様に工作を行って固定部品に接着を行う。
コンデンサーギャップの形成は,固定電極の保持部品と試料容器との間にマイカの切
片を挟み込むことで平行な隙間を作った。あらかじめ固定側電極と試料容器の電極をサ
ンドペーパーとラップフィルムで研磨し,周囲の固定部品と同一面となる平滑な平面を
形成しておく。電極の研磨は鏡面仕上げまで行う。マイカは 20 µm 程度の欠片から切り
出し,同一の厚さの切片を用意する。マイカは電極固定部品に 3 カ所等間隔に接着し,電
極間の隙間が平行になるよう固定を行った。
静電容量の測定はキャパシタンスブリッジによって行う。今回の実験では Andeen 社
の 2550A を用いて測定した。
3.4 超音波ねじれ振り子同時測定装置
本研究では多孔体ガラス Gelsil 中の超流動の観測に際して,その観測周波数に依存す
る可能性について検討を行う。そのため,前述したねじれ振り子の試料容器に超音波測
定の準備を施した試料を適用し,同時刻でねじれ振り子共振周波数と音速を測定,孔内
4
He の超流動を測定できる装置を開発した。図 3.8 に測定装置の振り子ヘッド部分の構
造を示す。
3.4.1 超音波ねじれ振り子同時測定装置の製作
超音波測定とねじれ振り子の測定装置は,超音波試料をねじれ振り子装置の試料容器
に格納する構造である。ねじれ振り子の試料容器に格納できる超音波測定試料の作製と,
振り子の共振に影響を与えることなく超音波信号を外に取り出す構造に特色がある。
超音波信号は同軸線をねじれロッドの中を通して取り出し,ここは試料導入ラインを
兼ねる。Gelsil 試料には超音波トランスデューサを接着し,信号を取り出すための同軸線
34
3.4 超音波ねじれ振り子同時測定装置
Coaxial cables
Electrode (Brass)
Stycast 1266
Transducers
(LiNbO3)
BeCu
Gelsil
図 3.8 ねじれ振り子と音速の同時測定装置
も導電性接着剤(ドータイト)を用いてトランスデューサの電極に固定される。同軸線は
直径 0.3 mm の UT8 を用いた。試料をねじれ振り子装置に固定するためのケースは固化
した Stycast 1266 を切削加工し,組み立てもスタイキャストを接着剤として用いて行っ
た。試料は同軸線が試料の外側を回り込む形に整え,スタイキャストケースに固定した。
固定には RTV ゴムを用いた。これは熱収縮による破壊を回避するためである。加工後の
資料の写真を図 3.9 に示す。白く見えるのがスタイキャストケースで,上部から延びる線
は超音波信号を導出する同軸線である。
ねじれ振り子装置は高 Q 値が得られ熱伝導性がよい,ベリリウム銅合金を切削して作
成した。測定に用いる振り子は,式 2.4.8 における Icell が小さい方が ρs (T ) に対する周
波数変化が大きくなるので,この値が小さくなるような設計を行う。共振周波数は 1kHz
前後になるよう,式 2.4.1,式 2.4.2,式 2.4.3 から形状やロッドの外径,内径を設計した。
切削時には,特にロッド部分の加工には注意が必要である。旋盤における加工では通常の
胴側面の加工のようにバイトを横に動かす加工では Q を高くすることができない。突っ
切りバイトを用いてロッド部分を削り出すようにした。切削加工後,時効硬化処理を施
した。ねじれ振り子のロッドの中心には試料の 4 He 導入ラインと同軸線取り出し経路を
兼ねた貫通穴が加工されている。加工後の写真を図 3.10 に示す。
超音波測定の用意を施した多孔質ガラス Gelsil 試料を格納した試料ケースは,このね
じれ振り子の試料空間に設置される。同軸線はロッド内を通し振り子の外まで導出する。
振り子ヘッド内への固定には前述した理由により RTV ゴムを用いた。試料を固定した
後,振り子の試料容器部分を同様にベリリウム銅合金で切削加工したキャップを用いて
35
第 3 章 実験準備
図 3.9
同時測定装置に用いた超音波測定試料。超音波測定用の準備を施した多孔体試
料 Gelsil を,スタイキャストで作成した試料ケースに格納し,固定している。超音波
信号は極細い同軸線を用いて外部に取り出す。
封止した。接着にはスタイキャストを用いて行い,リークを起こさぬようシールに万全
を期した。
ねじれ振り子装置の組み立てでは共振 Q 値を落とさぬよう配慮する必要がある。本測
定では複雑な構造の試料を試料容器に収めるため,振動を吸収し共振を妨げる可能性があ
る箇所が多くある。Q 値を高めるため,まず試料容器内の固定は完全に行った。試料空
間内の同軸線は導電性接着剤を用いて動かぬよう固定してた。試料容器自体も接着剤で
固定される。装置を冷凍機に設置する際には外部からの振動ノイズを遮断するローパス
フィルターとして,質量の大きな銅のプラットフォームを介して冷凍機に固定する。試
料空間のシールには,ガスケットとしてインジウムシールを用いた。
また共振を妨げる要因として,ねじれロッド内を経由する同軸線とねじれロッドとの
干渉が上げられる。ロッド内で同軸線が内壁面に接触することで吸収が発生し振動を妨
げることになる。それを防ぐために同軸線は貫通穴の中心を通るように加工し,ロッド
の上下で完全に固定するようにした。
36
3.4 超音波ねじれ振り子同時測定装置
図 3.10 同時測定装置に用いたねじれ振り子。図 3.9 で示した超音波測定用の準備を
施した試料はこのねじれ振り子の試料容器内に固定される。同軸線はロッド内を経由
して信号を外に取り出す。
3.4.2 ねじれ振り子測定装置の駆動(検出)電極
ねじれ振り子測定では平板コンデンサーを振り子本体と外部の固定電極との間に形成
し,静電的な機構で振り子の駆動と検出を行う。振り子側の電極は黄銅の切削加工によ
り製作し,Stycast 1266 によって振り子のヘッド部分に固定した(図 3.11)。
外部の固定電極は無酸素銅を加工して製作した。図 3.12 に構造を示す。円筒状の外
部電極の中に円錐形の内部電極が固定されている構造である。外部と内部の電極はテー
パーではめあわせになるように加工した。電極間の絶縁を確保するためにカプトンテー
プの切片を挟み込んである。内部電極と同軸線の心線をハンダ付けし,外部電極も同軸の
シールドと導通を取る。内部に Stycast 1266 を流し込んで固化させ,内部電極を固定す
る。振り子の電極と対向する面は Stycast 固化後に平面を切削加工により削りだし,サ
ンドペーパーとラップフィルムによって電極面を鏡面加工した。
固定電極と振り子の電極間のコンデンサーギャップは十数分の 1 mm 程度になるよう,
適当な隙間基準を用いて距離を管理,かつ固定電極と振り子電極との間が平行を保つよ
うに固定を行う。
37
第 3 章 実験準備
(1)ねじれ振り子本体
(2)キャップ
(3)電極
図 3.11 同時測定に用いたねじれ振り子の設計
Stycast 1266
同軸線
内部電極
絶縁層(カプトン)
図 3.12
38
ねじれ振り子の固定電極の構造
3.5 温度の制御
TGHCTGPEG
.QEMKP#OR
5[PVJGUK\GT
%T[QUVCV
%
&GVGEV
%#
4#
6QTUKQP
2TG#OR
&TKXG
4
8*
.QY2CUU(KNVGT
%5
&TKXG
%$
&GVGEV
図 3.13 ねじれ振り子測定のブロックダイヤグラム
3.4.3 ねじれ振り子装置の構成
ねじれ振り子は外部の固定電極と振り子の電極との間に平板コンデンサーが形成され
ている。振動の検出と振り子の駆動はいずれも電気的に行われ,電極間に働く電気力を
用いて振動を励起し,同様に電極間隔の変化を静電容量の変化として電気的に検出する。
図 3.13 はねじれ振り子測定の電気回路の概略と測定装置をブロックダイヤグラムに示し
たものである。駆動電極には 100V 程度の BIAS 電圧が印加されており,外部の信号発
生器から発生させたサイン波の電圧を BIAS 電圧に加えることで電極間に周期的外力を
発生させ,振り子がねじれる方向に力を加えることができる。また振動の検出側も同様
に電極には BIAS 電圧を印加してあらかじめ電荷が蓄えられた状態にあり,振り子がね
じれる方向に変位すると電極間隔が変化することで,回路に電流が発生し,その電流を電
流 AMP で増幅することで,振り子のねじれ変位を検出することができる。
3.5 温度の制御
3.5.1 極低温の生成
本実験は 50mK∼3K という広い温度域で測定を行った。極低温の生成には鈴木研究室
自作の 3 He -4 He 希釈冷凍機を用いた (図 3.14)。広い温度域で安定した温度調整を行う
ためには以下のように温度域によって慎重な操作が必要である。
39
第 3 章 実験準備
1. 0.8mK 以下
この極低温領域では,希釈冷凍機による冷却を行う。低い最低到達温度を得るた
めに,3 He -4 He mixture の循環量を調節する必要がある。その為に冷凍機の分留
器 (Still Pot) 付近に取り付けた Still ヒーター,その上部配管に取り付けた Fillm
ヒーターに適当な電流を流し,ガスを意図的に蒸発させ循環量を増やす。ガスの
循環はロータリーポンプにより行う。油拡散ポンプによるブースターを用いて循
環量を増加させ最低到達温度を下げることも可能であるが,そのことにより温度
調節が不安定になることがある。また冷凍機内を循環するガスの総量を調節する
必要があり,適宜 GHS(Gas Handring System) のガスタンクにガスを戻したり,
逆に冷凍機内にポンプにより押し込んで液化させるなどしてガス量を調節する。
2. 0.8K∼1.5K
この温度域では希釈冷凍機の混合器 (Mixing Chamber) において液体 3 He -4 He
mixture の相分離温度を越えるため,冷却能力が不安定になり,温度を安定させ
る事が非常に難しくなる。対策としてはガスの流量を調整し希釈冷凍機内のガス
循環量を減らすことで冷却能力を多少安定させることができる。その為に Still,
Fillm ヒーターの出力を切り蒸発量を減らし,ガスの循環量を調節するバルブをで
きるだけ小さく絞ることでガス流量を小さくする。
3. 3K∼1.5K
この温度域では希釈冷凍機による冷却能力を必要としない。3 He -4 He mixture ガ
スの循環を止め,ヘリウムの気化熱を利用した 1K 冷凍機の冷却能力による冷却を
行う。ただし 1K 冷凍機と試料ステージとの間は距離が大きく離れており,配管や
配線,構造物による熱伝導だけで試料を冷却することが難しい。そのため,希釈冷
凍機の配管内に適当に 3 He -4 He mixture ガスを導入して封じ,配管内に液体の被
膜を張らせることによって熱伝導を確保する必要がある。これにより,1K 冷凍機
の冷却能力を液体の熱伝導により試料ステージまで伝えることができる。
3.5.2 温度測定とヒーター制御
安定した温度制御を行うためには,現在の温度を正確に測定し,その結果を適切に
フィードバックしてヒーター出力を制御する必要がある
40
3.5 温度の制御
1K Pot
Still Pot
Mixing Chamber
Sample Stage
図 3.14
測定に用いた鈴木研究室の 3 He -4 He 希釈冷凍機
41
第 3 章 実験準備
温度測定
試料容器付近には酸化ルテニウム抵抗温度計が取り付けてある。この温度計は温度に
より変化する電気抵抗を測定することで温度計として用いられるものである。現在の電
気抵抗とあらかじめ得られている校正表とを比較することで現在の温度を知ることがで
きる。電気抵抗の測定には 4 端子法による交流ブリッジで電気抵抗を測定する温度制御
装置(Lake shore 340)を用いた。極低温では電気抵抗測定の測定電流による温度計の発
熱が無視できない程度に測定に影響を与える。そのため極低温領域では測定電流を小さ
くしないと温度が正確に測定できなくなるので注意が必要である。
ヒーター制御
試料の温度を任意の温度に設定し,なおかつその温度に安定させるためには試料を加
熱するヒーターを適切に制御する必要がある。今回測定に用いた温度制御装置では試料
ヒーター制御に PID 制御を利用している。PID 制御は温度制御だけではなく圧力制御な
ど広く使われる制御方法である。
3.6 試料ガスの導入と多孔体試料の孔内の状態
3.6.1 多孔体中の 4 He
本測定では多孔体試料 Gelsil の孔内に 4 He を導入し,孔内の 4 He が薄い膜状の吸着膜
の状態にある条件,加圧液体が満たされている条件,孔内に固体の 4 He が生成されてい
る条件において測定を行った。図 3.15 は試料導入に伴う孔内の状態の変化を模式的に表
したものである。
基板壁に何も付いていない状態に 4 He を導入すると最初に基板に吸着する第一層は基
板と強く結びつき固相のように振る舞う不活性層となる。4 He 導入量を増やしある一定
の面密度を超えると薄膜 4 He は超流動性を示す液相膜を作る。多孔質対の表面積は既知
であるので導入 4 He 量を制御することで面密度条件をコントロールすることができる。
液相膜の状態からさらに 4 He を導入すると,孔内が液体 4 He で満たされた状態にな
る。この条件では配管で接続された室温部に置かれた圧力計,あるいは内部に設置して
いる静電容量型圧力計により液体 4 He 試料の圧力を得ることができる。
さらに圧力の高い領域では孔内の 4 He は固相に転移する。試料ガスは 4 K において導
入,液化並びに加圧を行ったが,試料圧力を 2.5 MPa 以上に加圧すると低温でヘリウム
の凝固圧力を超える。試料を冷却するための冷凍機の稼働時,導入細管の経路の途中に
42
3.6 試料ガスの導入と多孔体試料の孔内の状態
He ガス導入,面密度増加
面密度ゼロ
不活性層
不活性層 + 液相膜
液体 He 導入,キャピラリブロック法による加圧
不活性層 + 液相膜
液体
固体
He 導入時の細孔内の様子。空の状態から 4 He を導入することで吸着膜の状
態になり,さらに導入量を増やすことで孔内に液体 4 He が満たされる。さらにキャピ
ラリブロック法による加圧で孔内に固体 4 He が満たされた状態を作る。
図 3.15
4
最低温度領域があり,そこから試料の 4 He の固化が始まり細管が閉塞する。このような
状態では試料導入細管内の 4 He が固化するため外部から加圧を行うこと,内部の圧力を
知ることはできない。そのため,高圧域での測定ではキャピラリブロック法により試料
の圧力条件の制御を行った。これは,冷凍機を停止し試料を高温にした状態で目標とす
る圧力より高い圧力に調整し,冷凍機を作動させて配管の 4 He が固化した後に最終的に
到達した圧力を試料圧力とするものである。
,キャピラリブロック法による試料の圧力は,
冷凍機内部,試料容器に設置してある静電容量型圧力計で測定する。
3.6.2
4
He の試料への導入と制御
測定に用いる試料ガス(4 He)は以下の要領で導入した。試料容器には内径 0.2mm の
キュプロニッケル製細管を接続してあり,クライオスタットの外から試料ガスを導入で
きるよう配管してある。内径が非常に小さいので高圧力の下で管が受ける応力は小さく,
43
第 3 章 実験準備
Press. Gauge
Vent Valve
To Sample
To Vac.RP
Sample Gas
LN2 Trap
To He Bottle
図 3.16 試料ガス導入用 GHS
ヘリウムボンベから導入した試料ガスは液体窒素トラップを通り不純物を除去され試
料容器へ導かれる。圧力は接続されたガスボンベの圧力レギュレータを用いて調整を
行った。 導入圧力の測定は GHS 付属の圧力計を用いた。
本測定で用いる高圧力に十分耐えることができる。冷凍機内に設置されている細管の全
長は約 3m であり,細管同士の接続,また試料容器への導入ポート部ではハンダ付けによ
り接続を行っている。
試料ガスの操作には図 3.16 のようなガス操作システム (Gas Handling System, GHS)
を製作し測定に用いた。GHS は操作性よく試料ガスの制御,測定作業を行えるよう設計
する。GHS はパネルにバルブ,配管や圧力計など必要な機器が配置され,試料容器への
ガスライン,試料ガス源の 4 He ガス容器,排気系(油回転真空ポンプ,油拡散真空ポン
プ)など必要な機器に接続される。配管内部の容積は,外部に体積が既知の標準体積を接
続し,ガスを導入して圧力変化を測定することで知ることができる。試料ガスの試料容
器への導入に際しては,4 He ガス中の不純物を除去して純度を確保し,細管が水などの不
純物による閉塞するなどのトラブルを防ぐ必要がある。試料 4 He ガスの精製には液体窒
素トラップ(コイル状の銅パイプを液体窒素に漬けた構造。パイプ内を通るガスを液体
窒素で冷却,水など固化する不純物を取り除く)を通し,不純物を取り除いた。
多孔体試料に薄膜 4 He を生成し面密度を制御するためには面積に応じた物質量の 4 He
を導入する必要があるが,実際に多孔体試料に吸着した導入試料ガスの計量は,配管内の
44
3.6 試料ガスの導入と多孔体試料の孔内の状態
体積と試料導入時の圧力変化から求める。また,加圧領域での試料 4 He の加圧操作には,
4
He ガスボンベの内圧を適当に減圧し利用した。圧力の調節はボンベに取り付けた高圧
レギュレーターと GHS の Setra 社製の圧力計により行った。
45
第4章
結果と議論
本研究では超音波測定による音速測定(RUN 1)と,ねじれ振り子と超音波測定を同
時刻に行う同時測定(RUN 2)の,二段階の測定を行った。RUN1 と RUN2 は同一の試
料を用い,試料準備段階での熱処理方法が異なっている。本章では,各測定方法の基本的
な諸元の取得結果について説明を行い,そして多孔体試料に 4 He を導入し孔内に 4 He を
閉じ込めた状態で行った超流動測定の結果を,吸着膜状態,加圧液体および固体状態につ
いて説明する。同時測定においては超流動性の観測方法依存性について結果の評価を行
う。また RUN1 と RUN2 の結果を比較し,試料の熱処理の違いが多孔体試料に与えた影
響と,孔内の 4 He の超流動性に与える影響について,音速測定の結果を基に議論を行う。
4.1 超音波とねじれ振り子の同時測定装置
本節では RUN2 として行った,超音波とねじれ振り子の同時測定による測定の結果を
説明する。ねじれ振り子と超音波の同時測定装置は今回初めて開発を行ったものである
ので,まず最初に本測定装置でそれぞれの測定が正しく測定されることを確認する必要
がある。ねじれ振り子は共振カーブを測定し振り子が共振することを確認することで振
り子が正常に動作していることを確認する。また共振の品質を評価する Q 値を共振カー
ブから計算し,同時測定のために振り子のセルの中に超音波試料を設置したことが振り
子の共振に悪影響を与えていないことを共振の Q 値から確認する。
また,超音波測定に関してはパルスが検出され音速測定が可能な状態にあるか確認を
行う。同時測定に用いる超音波試料はねじれ振り子の試料容器の中に収めるため,複雑
な構造の試料カプセルに固定されており,信号を取得する同軸線が複雑な経路を通って外
部に取り出されている。まず最初に支障なく超音波信号を試料まで到達させ透過させる
47
第 4 章 結果と議論
ことができるかどうか,また透過した信号を外部に取り出し正常に検出できるかの確認を
行う。音波の透過と検出を確認した後,パルス波形を取得し音速の絶対値を求め,PSD
検波による音速測定が可能であることを確認する。
4.1.1 ねじれ振り子の共鳴曲線の測定
ねじれ振り子測定では振り子の共振周波数の変化を捉える測定方法であるのでまず共
鳴周波数を知る必要がある。ねじれ振り子を電気回路を用いてフィードバックループに
組み込む形式で構成する測定系では振り子は自発的な発振を始める [18]。しかし本測定
では振幅を PSD により位相検波し,位相成分の値から PC により計算した結果を GP-IB
の通信線を通して発信器にフィードバックする方式で測定を行うので,あらかじめ初期
の共振周波数が分からないと共振周波数を追跡することができない。したがって測定の
始めに共振周波数を探り当てる必要がある。
共振周波数を探り当てるには,設計で想定した周波数帯の範囲で振り子の励起信号の
周波数を変化させ,検出される振り子の振幅を測定する。振り子の振幅は,振り子の外力
を参照信号としてロックインアンプにより検出する。図 4.1 に励起信号の周波数を連続
して変化させて測定したねじれ振り子の振幅の周波数依存性,いわゆる共振カーブを示
す。約 0.1 K においてヘリウムガスが導入されていない状態で測定した。ロックインア
ンプの位相検波により得られた,振り子の励起信号に対する位相が 90◦ 成分と 0◦ 成分の
信号を,それぞれ色を変えて描いている。振り子の設計段階において,目標とする共振周
波数(およそ 1 kHz から 2 kHz)をあらかじめ想定し,式 2.4.1 と式 2.4.2 により各所の
寸法を決定して設計を行っている。正しく工作されたねじれ振り子の共振周波数は設計
からそれほど大きくずれることはあまりなく,共振周波数を探る共振カーブ測定はその
目標周波数の周辺を探索することになる。外力を受けて強制振動の状態にあるねじれ振
り子は外力により振幅が励起されるまでの緩和時間が長く,特に Q 値が大きな振り子の
場合は数十秒から数百秒に達することがある。共振カーブの測定では,励起信号の周波
数を設定した後この緩和時間を考慮した待ち時間を置きながら測定を行った。
同時測定装置の共振の Q 値は,共振カーブから式 2.4.4 を用いて次のように計算さ
れる。
Q=
2428.658 [Hz]
= 2.7 × 105
0.009 [s]
(4.1.1)
今回測定に用いたねじれ振り子の Q 値は空の状態で 2.7 × 105 程度であった。ねじれ振
り子で超流動測定を行うには十分な Q 値であり,同時測定装置のねじれ振り子は正常に
48
4.1 超音波とねじれ振り子の同時測定装置
Q : 2428.658/0.009 = 2.7E5
4.28 uV
4e-05
∆ : 0.009 Hz
Amp. (µV)
2e-05
2428.658
0
-2e-05
-4e-05
2428.65
2428.7
Freqency (Hz)
図 4.1 ねじれ振り子の共鳴曲線。横軸が励起信号の周波数,縦軸が検出されたねじれ
振り子の振幅。90 度位相が異なる 2 成分を示してある。
動作していると言える。
4.1.2 パルスエコー法による音速の絶対値の測定
図 4.2 は Gelsil 試料を透過し検出側トランスデューサで検出されたパルス信号である。
測定は,試料が空の状態で 0.1 K に設定した状態で行った。横軸は実時間で,音波発生ト
リガーの時刻をゼロとして描画している。トリガーから実際に音波が試料に入射される
までわずかな遅れが存在するので,入射した時刻は波形に混信した入射信号の立ち上が
りを入射した時刻として基準とする。ここから音波が到達した時刻までの ∆t と試料長 L
から音速の絶対値 v0 を次にように求めた。
v0 [m/s] =
1.84 [mm]
= 1.9 × 103 [m/s]
0.95 [µs]
(4.1.2)
なお,同時測定においては超音波測定に適用されている超音波の周波数は 8.5MHz 前
後である。定位相法による測定を行ったので,測定周波数は音速の変化にあわせてわず
かに変動している。
49
第 4 章 結果と議論
Amp. (mV)
20
0
-20
0
2000
Time (nS)
4000
図 4.2 長さ 1.84 mm の Gelsil 試料を透過した波形。横軸が同期信号による音波発生
トリガーからの時刻,縦軸が検出された波形信号の振幅である。パルスのトリガーか
ら実際に波形が検出されるまでの時間にもクロストークの波形が測定されており,こ
の間にパルスが入射している。
4.2 同時測定による多孔質ガラス Gelsil 細孔中の 4 He の超流
動の観測
ねじれ振り子の共振周波数と超音波の音速の同時測定を,試料が空の状態,薄膜 4 He
を吸着させた状態,液体加圧状態で行った。加圧状態の測定は 2.41MPa までの圧力領域
で行った。
4.2.1
4
He 吸着膜状態での同時測定
図 4.3 に,超音波測定で測定した音速温度依存性と,ねじれ振り子の共振周波数の温度
依存性を示す。温度の下降に伴い,共振周波数と音速には薄膜 4 He の超流動転移に伴う
明確な立ち上がりが観測されている。同じ膜厚においては超流動転移温度は両測定にお
いて一致している。Tc は膜厚を増加させると高温側にシフトしている。
Gelsil 基板に吸着した薄膜 4 He の液層の総量から,超流動転移に伴って基板から離脱
する成分を求める。図 4.3 の挿入図は,1 K と 0.1 K における空の状態から試料導入に
50
4.2 同時測定による多孔質ガラス Gelsil 細孔中の 4 He の超流動の観測
(a)
-0.2
∆f (Hz )
0.45
-0.3
F - 2428 (Hz)
22.4
23.2
-0.4
24.1
0.40
0.1 K
1K
20
30
2
n (µmol/m )
24.9
25.8
26.6
27.4
28.3
0.35
29.1
0
0.5
T (K)
1
(b)
-1.0
-1.2
-1.5
∆v/v (%)
22.4
-1.4
-2.0
23.2
0.1 K
1K
20
24.1
24.9
-1.6
25.8
26.6
27.4
28.3
29.1
-1.8
0
図 4.3
30
0.5
T (K)
1
吸着膜状態での音速とねじれ振り子の共振周波数一覧
(a) ねじれ振り子の共振周波数の温度依存性。数字は膜厚で単位は µmol/m2 。横軸は
温度で縦軸は共振周波数。2428 Hz からの差分で示している。挿入図は試料が空の状
態からの共振周波数の変化量の膜厚依存性。1 K と 0.1 K における結果を重ねている。
(b) 超音波測定による音速の温度依存性。各膜厚で (a) と同時に測定を行ったものであ
る。横軸は温度。縦軸は空の状態での音速からの変化率を表している。挿入図は試料
が空の状態からの音速の面密度依存性。1 K と 0.1 K における結果を重ねている。
51
第 4 章 結果と議論
24.9 µmol/m2
Fraction of decoupled mass (%)
40
20
0
27.4 µmol/m2
40
20
0
0
Ultrasound
Torsional Oscillator
0.5
T (K)
1
図 4.4 同時測定で観測された基板から離脱する吸着膜の質量の割合の比較
伴う音速と共振周波数の変化量について,膜厚ごとに図示したものである。ねじれ振り
子測定では,膜厚がおよそ 23.2 µmol/m2 までは両温度で膜厚に比例した降下量を示し,
それ以上の膜厚では 0.1 K での値は折れ曲がり別の直線に乗る振る舞いが見られる。こ
れは超流動転移に伴い,吸着膜の基板振動からの離脱が発生していることが原因である。
二つの温度での値から,実際に基板に存在する 4 He 液層膜のうち,超流動転移に伴い離
脱している割合はおよそ 25% と見積もった。一方超音波測定においては超流動転移にと
もなう離脱以外に,4 He が基板に吸着したことによる弾性定数の変化とこれに伴う音速
の変化を観測している。低温域での音速降下量は,基板の弾性定数の変化により抑制さ
れている。0.1 K の音速降下量は 23.2 µmol/m2 で上向きに折れ曲がり,これ以上の膜厚
ではほぼ直線に乗る振る舞いを示す。この直線の傾きから,吸着している液体膜の総量
のうち 40% の離脱に相当する音速変化であると求められた。
超音波測定とねじれ振り子測定では,基板から離脱する質量の割合が異なって観測さ
れている。図 4.4 に膜厚 22.4 µmol/m2 と 27.4 µmol/m2 の測定について,基板からの
離脱量温度依存性の,両測定での比較を示す。音速測定については,Tc より高温側の弾
性定数変化に伴う音速変化について直線であると仮定し差し引いている。図に示される
ように,観測にかかる離脱量の温度依存性は二測定の間で異なっている。
52
4.2 同時測定による多孔質ガラス Gelsil 細孔中の 4 He の超流動の観測
40
Superfluid
n (µmol/m2)
30
20
Nomal fluid
10
0.0
0.5
1.0
1.5
T (K)
図 4.5
吸着膜領域での 4 He の超流動相図。比較に山本らの報告を ˜ に示してある。
薄膜領域での超流動転移温度相図を図 4.4 に示す。比較のために山本らの報告を重ね
て示してある。
4.2.2 加圧液体領域での同時測定
図 4.6 に,加圧液体状態で測定した,ねじれ振り子測定の共鳴周波数,並びに同時に超
音波測定で測定した音速の温度依存性を示す。音速,ねじれ振り子とも孔内の 4 He の超
流動転移に伴う立ち上がりが Tc において観測されており,Tc は圧力の増加とともに低
温側にシフトしている。
ねじれ振り子の共振周波数は多孔体試料 Gelsil の孔内に導入される 4 He の量に比例
する形で減少する。孔内が 4 He で満たされた後圧力の上昇に従い共振周波数は減少する
が,これは試料容器の内側表面や Gelsil の表面に存在する液体 4 He の粘性侵入長分の
質量が,振り子の慣性モーメントに寄与するものである。ねじれ振り子の共振周波数,
約 2.43 kHz では,粘性侵入長は約 1.3 µm で,超音波測定の周波数約 8.35 MHz では
23 nm 程度であり,バルク液体 4 He の寄与はねじれ振り子測定で大きく観測されている。
ねじれ振り子と超音波測定,二つの測定方法の間で超流動の観測量の比較を行う。こ
の場合,多孔体試料外に存在する 4 He が超流動に転移する分の寄与を差し引く必要があ
る。ねじれ振り子測定では試料容器内の常流動成分の寄与を周波数変化から差し引く。
その後,それぞれの圧力について,バルク 4 He の超流動転移温度で規格化し,温度を基
53
第 4 章 結果と議論
(a) Torsional oscillator
-0.65
Tc
F - Fempty (Hz)
0.13 MPa
-0.7
0.6 MPa
0.9 MPa
1.2 MPa
-0.75
1.5 MPa
1.8 MPa
2.1 MPa
-0.8
2.4 MPa
2.45 MPa
0
Tλ
1
2
T (K)
(b) Ultrasound
-1.8
Empty
∆v/v (%)
0
-2
-0.2
Tc
-2.2
0.13 MPa
-0.4
-2.4
2.45 MPa
0
1
-0.6
2
T (K)
図 4.6
加圧領域で測定したねじれ振り子共振周波数と音速の温度依存性の一覧。(a)
ねじれ振り子共振周波数は空の状態での周波数からの差分で示してある。(b) 音速は
空の試料の音速 v0 を基準にした変化量 ∆v/v0 である
54
4.2 同時測定による多孔質ガラス Gelsil 細孔中の 4 He の超流動の観測
(a) Ultrasound
(b) Torsional oscillator
-1.5
0.17
∆v / v0 (%)
TC
0.17
0.65
0.96
1.26
1.88
-3.0
0
0.65
0.96
1.26
1.88
-1.6
1
2
Tλ
2.31
2.31
T (K)
図 4.7
TC
F-F0 (Hz)
-2.0
0
1
2
T (K)
加圧領域で測定したねじれ振り子共振周波数と音速の温度依存性。数字は超流
動転移温度における圧力。ねじれ振り子共振周波数については空の状態で 2K の共振
周波数 f0 (2428.684 Hz) からの差分で示してある。音速の図中の点線は欠陥の寄与に
よる音速変化。
準に密度比 ρ(1.88 MPa)/ρ(P ) を周波数変化に乗じた。適当に調整を行った周波数変化
は,各圧力とも高温側の振る舞いが一つの曲線上に乗る。これをバルク 4 He の超流動の
寄与として差し引くことができる。バルク 4 He の寄与を差し引き,多孔体中の 4 He の超
流動の寄与 ∆fp を求めた。
超音波測定については,音速変化の背景には多孔体表面の 4 He 不活性層がアモルファ
ス固体として振る舞うことによる影響が寄与しており,これは格子欠陥の移動にともな
う音波の緩和現象として説明される。Gelsil より孔径の大きな多孔質 Vycor ガラスの測
定では,孔内の 4 He の寄与による音速と吸収の変化から格子欠陥の影響が観測されて
いる [11]。不活性層としての 4 He の影響については報告されていないが,孔内に在する
4
He の総量の内,不活性層として存在する割合の違いによると考えられる。Gelsil の場
合,単位体積あたりの表面積が 603 m2 /cm3 と大きく,孔内に在する 4 He の中の不活性
層の割合も 60% と大きいことから不活性層中の格子欠陥の量も大きいことが期待され
る。図 4.7 では欠陥の寄与による音速変化を点線で示してある。温度低下とともに音速
の上昇として寄与し,低温域では飽和する振る舞いを示す。これを全体の音速変化から
差し引くことで孔内の 4 He の超流動転移にともなう音速変化 ∆vp を求めた。
55
第 4 章 結果と議論
図 4.8 に,圧力 0.96 MPa と 2.04 MPa における ∆vp と ∆fp の温度依存性を示す。孔
内の 4 He の総量に対する比率で比較するため,4 He で孔内が満たされることによる音速
と共振周波数の変化量 ∆vf ull と ∆ff ull で除した割合で比較する。ここで ∆vf ull は圧力
0.17MPa の結果から,∆ff ull は,ねじれ振り子内に在するバルク 4 He の影響を考慮して
面密度 33 µmol/m2 で孔内が 4 He に満たされた状態での結果から求めた [12]。いずれの
圧力でも,超流動転移温度からおよそ 0.5 K までの間では両測定では離脱量の割合はほ
ぼ一致している。この同時測定の結果から,多孔体試料中の 4 He について,観測される
超流動成分の割合の温度依存性は測定方法に依存していないことが示される。観測され
た超流動成分の割合が一致していることから,Gelsil 中の 4 He の観測では観測周波数に
よって χ ファクター,すなわち超流動転移後にも基板から離脱しない成分の割合は測定
周波数(ねじれ振り子は kHz オーダー,超音波測定では MHz オーダー)に依存してい
ないことが示される。ねじれ振り子測定では観測された超流動成分の割合は 0.8K 以下の
領域では温度依存性が小さくなり,0.5K 以下ではほぼ一定となる。一方超音波測定にお
いては,0.5 K においても上昇が観測され,およそ 0.8 K から立ち上がるように観測され
た。0.8 K 以下の温度域での音速変化の振る舞いは圧力に依存していないので,これは超
流動成分の寄与によるものではなく差し引かれていない背景の音速変化があることを示
唆する。空の試料での音速測定では,ガラス固有の二準位系(TLS)に由来する音速の
ピークを 0.15 K 付近に観測している。TLS による寄与が低温域における温度依存性に
影響を与えていると思われる。
図 4.9 に,超流動転移温度 Tc の圧力依存性を示す。超流動転移温度は両測定で一致し
ていることが分かる。これは山本らのねじれ振り子測定による Gelsil 内の超流動の相図
との相違は観測方法が異なることによるものでは無いことを示している。これらの Tc の
相違は室温にて行った熱処理が異なることが影響していると考えられる。
観測される超流動成分の割合,∆fp /∆ff ull と ∆vp /∆vf ull の圧力依存性について
は,0.5K における結果を図 4.9 に示した。この温度以下では ∆fp /∆ff ull は温度依存
性が小さく一定で,絶対零度における超流動成分の割合を示していると期待される。
∆fp /∆ff ull は圧力上昇とともに単調に減少している。音速変化の圧力依存性について
はねじれ振り子の結果と同様な振る舞いを見せるが,全圧力領域については約 1.5% 異
なっている。この違いは前述した,音速の温度依存性の背景にある音速変化によるもの
であると考えられる。音速に寄与する TLS の影響を除いて,観測される孔内の 4 He 超流
動成分の圧力依存性は両測定で一致していると言える。
56
4.2 同時測定による多孔質ガラス Gelsil 細孔中の 4 He の超流動の観測
0.96 MPa 0.1
∆vp / ∆vfull
∆fp / ∆ffull
0.1
Tortional oscillator
Ultrasound
0
0
0.1
2.04 MPa 0.1
∆fp / ∆ffull
∆vp / ∆vfull
0
0
0
0.5
1
1.5
T (K)
図 4.8
同時測定による観測にかかる超流動成分の比較。ねじれ振り子の共振周波数の
温度依存性と音速温度依存性から求めた,観測にかかる超流動成分の割合を比較する。
(a)
1
0.5
Torsional oscillator
Ultrasound
0
8
8
(b)
6
6
4
4
2
2
0
0
1
2
0
3
∆vp(0.5K) / ∆vfull (%)
∆fp (0.5K) / ∆ffull (%)
TC (K)
1.5
P (MPa)
図 4.9 (a)観測された Tc の圧力依存性。両測定で一致している。(b)観測された
超流動成分の圧力依存性。
57
第 4 章 結果と議論
4.2.3 同時測定による超流動転移温度の詳細な比較
ねじれ振り子と超音波測定は測定周波数が大きく異なっており(ねじれ振り子は kHz
オーダー,超音波測定では MHz オーダー),このことが超流動の観測温度に変化をもた
らしているか検証する。図 4.10 と図 4.11 に,同時測定で測定を行った吸着膜状態での測
定と,加圧液体状態での測定の,音速と共振周波数の比較を示す。いずれも超流動転移温
度近傍を拡大して示している。
拡大して比較すると,いずれの面密度,圧力においても,測定分解能の範囲内で両測定
の超流動転移温度は一致している。本研究の測定では超流動観測に観測周波数の影響は
見られないと言える。
4.3 共鳴法による音速測定
本節では RUN1 として行った,音速測定(共鳴法)にる測定について説明する。共鳴
法による音速測定ではまずはじめに多孔質ガラス Gelsil 試料の共鳴曲線を取得し,試料
の共鳴周波数を得て音速測定が可能であることを確認する。また,高圧試料容器に設置
してある静電容量型圧力計の静電容量と圧力との関係を測定し,圧力計に値を付ける校
正作業を行う。
4.3.1 超音波試料の共鳴曲線の測定
図 4.12 に励起信号の周波数を連続して変化させて測定した試料内の振幅の周波数依存
性,すなわち共振カーブを示す。試料の Gelsil は厚さ 2.11mm で,音波は横波である。
約 3 K においてヘリウムガスが導入されていない状態で測定した。ロックインアンプに
より励起信号に対して位相が 90◦ 成分と 0◦ 成分に分けて PSD 検波したものを,それぞ
れ色を変えて描いている。10 MHz 付近の大きなピークは超音波振動子固有の共振が観
測されたものである。細かく見えるピークは試料の共鳴が観測されたもので,共振点は
音速の関数である。本実験ではこの試料固有の共鳴周波数の変化を測定することで音速
の変化を測定した。
図 4.13 は共鳴曲線の一部を拡大したものである。前図と同様に 0◦ と 90◦ の位相成分
を色を変えて描いている。0◦ 成分がゼロとなる共鳴周波数が確認できる。またその時の
0◦ 成分の値が振幅である。測定器が検出する信号は参照信号に対して位相回りがあり,
また,外部からの雑音などが含まれる。そのままでは正確な試料内の定在波の振幅を求め
58
4.3 共鳴法による音速測定
23.2 µmol/m2
T.O.
U.S.
-1.4
-0.28
T.O.
∆v/v (%)
∆f (Hz)
-0.27
-1.4
∆f (Hz)
-1.3
∆v/v (%)
24.1 µmol/m2
U.S.
-0.29
-0.3
0.277 K
0
0.2
0.39 K
-1.5
0.4
T (K)
0.6
0
0.2
0.4
T (K)
24.9 µmol/m2
0.6
25.8 µmol/m2
-0.29
-1.4
-0.3
T.O.
T.O.
∆f (Hz)
U.S.
-1.5
∆v/v (%)
∆f (Hz)
∆v/v (%)
-1.5
U.S.
-0.31
-0.32
-1.6
0.54 K
0.2
0.4
0.6
T (K)
0.64 K
0.8
0.4
0.6
T (K)
0.8
1
27.4 µmol/m2
26.6 µmol/m2
T.O.
T.O.
-1.6
-0.33
∆f (Hz)
U.S.
∆v/v (%)
∆f (Hz)
∆v/v (%)
-0.32
-1.6
U.S.
-1.7
-1.7
0.79 K
0.72 K
0.4
0.6
0.8
T (K)
1
-0.34
0.4
0.6
0.8
T (K)
1
28.3 µmol/m2
28.3 µmol/m2
T.O.
T.O.
-1.7
U.S.
U.S.
-0.35
∆f (Hz)
∆f (Hz)
-1.7
∆v/v (%)
-0.34
∆v/v (%)
-0.35
-1.8
1.01 K
0.93 K
-1.8
0.6
0.8
T (K)
1
-0.36
1.2
0.6
0.8
T (K)
1
-0.37
1.2
図 4.10 薄膜領域で測定したねじれ振り子共振周波数と音速の温度依存性。音速は空
の試料の音速 v0 を基準にした変化量 ∆v/v0 である。
59
第 4 章 結果と議論
0.13MPa
0.6MPa
T.O.
T.O.
-2.2
-0.71
-2.2
-0.69
U.S.
-2.3
∆f (Hz)
∆v/v (%)
∆f (Hz)
∆v/v (%)
U.S.
-2.3
-0.73
1.42 K
1.2
1.4
T (K)
1.34 K
-0.71
1.6
1
1.2
1.4
T (K)
1.6
1.2MPa
0.9MPa
-2.2
-2.2
T.O.
T.O.
-0.73
∆f (Hz)
-2.3
∆v/v (%)
U.S.
∆f (Hz)
∆v/v (%)
U.S.
-0.74
-2.3
-0.75
-0.76
1.28 K
-2.4
1
1.2
1.4
T (K)
1.22 K
-2.4
1.6
1
1.2
T (K)
1.4
1.5MPa
1.8MPa
-2.2
T.O.
T.O.
-0.76
U.S.
∆f (Hz)
-2.3
-2.3
∆v/v (%)
∆f (Hz)
∆v/v (%)
U.S.
-0.77
-0.79
-2.4
1.86 K
1.15 K
-2.4
0.8
1
1.2
T (K)
1.4
-0.78
0.8
2.4MPa
-0.79
-2.2
1
1.2
T (K)
1.4
2.45MPa
-2.2
T.O.
-2.3
U.S.
0.90 K
0.8
1
T (K)
∆f (Hz)
∆v/v (%)
∆f (Hz)
∆v/v (%)
-2.3
-2.4
0.6
-0.78
T.O.
U.S.
0.89 K
1.2
-0.81
-2.4
0.6
0.8
1
T (K)
1.2
-0.8
図 4.11 加圧領域で測定したねじれ振り子共振周波数と音速の温度依存性。音速は空
の試料の音速 v0 を基準にした変化量 ∆v/v0 である。
60
4.3 共鳴法による音速測定
ᝄ [ǴV]
100
0
-100
5
10
ᵄᢙ [MHz]
図 4.12
長さ 2.11 mm の Gelsil 試料の共鳴曲線
横軸が励起信号の周波数,縦軸が試料内に励起された定在波の振幅である。大きなピー
クは超音波振動子固有の共振が現れたものである。細かく見えるピークが試料の音速
にかかわる試料固有の共鳴を示している。
Amp. (uV)
10
0
-10
5
5.5
6
f (MHz)
図 4.13
共鳴曲線の一部を拡大すると,励起信号で共振している箇所を確認できる。
励起信号の位相に対し,0◦ と 90◦ の位相成分に分けてプロットしている。ゼロにおい
て急な傾きで交差している線が位相成分が 0◦ の振幅である。本測定では共鳴点すなわ
ちこの 0◦ 成分がゼロになる点に励起信号の周波数を変化させフィードバックをかけ,
測定を行った。
61
第 4 章 結果と議論
(1/25.56482)−(1/C)
0.002
0.001
0
0
1
Pressure [MPa]
2
図 4.14 1K で測定した,静電容量圧力計の静電容量と圧力の関係。
られないので,適当な補正を行う必要がある (付録 C.2 と図 C.1 を参照。)。音速の温度
依存性の測定では,音波の位相成分の 0◦ 成分をゼロにするように周波数にフィードバッ
クをかけ,共鳴周波数を連続的に測定した。
4.3.2 静電容量型圧力計の較正
高圧試料容器に設置されている静電容量型圧力計は,試料の圧力を静電容量の関数と
して求めるために較正を行う必要がある。試料温度が 1 K にある状態で外部の配管に接
続された圧力計と静電容量との関係を測定し,静電容量圧力計の値付けを行った。
測定された値と式 2.5.3 から,最小二乗法を用いたフィットにより以下の圧力と静電容
量の関係を得た。
P [MPa] = 43.66405 −
62
1116.2636
C [pF]
(4.3.1)
4.4 音速測定による多孔質ガラス Gelsil 細孔中の 4 He の超流動の観測
Év â10 3
v
0.2
Run 2
0
Run 1
-0.2
-0.4
10 -1
10 0
T (K)
図 4.15 試料に 4 He が吸着していない,空の状態での多孔体試料 Gelsil の音速温度依存性
4.4 音速測定による多孔質ガラス Gelsil 細孔中の 4 He の超流
動の観測
音速測定による超流動の測定は,Gelsil 試料に 4 He が付いていない状態,吸着させた
状態,孔内が液体,および固体となる加圧状態で測定を行った。固体 4 He の測定におい
てはキャピラリブロック法による試料仕込により試料準備を行ったが,その際の試料圧
力測定は試料に近い低温箇所に設置した静電容量型圧力計によって行った。
4.4.1 Gelsil の音速の温度依存性
図 4.15 は RUN1 において,4 He 薄膜が付いていない状態で測定を行った多孔質ガラ
ス Gelsil 試料の音速の温度依存性である。RUN2 の結果を重ねて示してある。空の状態
での音速は 0.1 K においては 1.98×103 m/s であり,0.35 K 付近にピークを示した。
図 4.16(a) に Gelsil 基板上に 4 He を吸着した状態で測定した音速温度依存性を示す。
孔内への 4 He の導入に伴い音速は低下し,降下量は試料の導入量に比例している。音速
が最大となる温度は試料の導入とともに低温側にシフトし,この最大となる温度より高
温側の音速の傾きは大きくなる。試料の 4 He の面密度 23.9 µ/m2 より厚い領域では,薄
膜 4 He の超流動に伴う音速の立ち上がりが温度 Tc において明確に観測されている。Tc
は試料面密度の増加に伴い高温側に移動している。細孔内が 4 He に満たされるに伴い Tc
63
第 4 章 結果と議論
1984
0.0 µmol/m2
1960
1950
23.0
1982
23.9
1980
25.4
1940
(a)
31.0
v
(m/s)
(b)
1940
MPa
0.06
0.38
0.85
1.54
2.01
2.30
2.95
3.57
4.21
5.06
1930
1920
0
1
T (K)
2
図 4.16 (a) 吸着膜状態と (b) 加圧状態での音速温度依存性。(a) の数字は面密度を表
し,(b) の数字は圧力である。加圧状態のデータは最低圧の 0.06 MPa を除き見やす
いように垂直方向の平行移動を行っている。
は 1.4K 付近に至り,音速は空の状態からおよそ 2.1% 遅くなっている。これら 4 He 導入
に伴う音速の変化量と,Gelsil の密度(1.25 g/cm3 ),4 He の密度(0.145 g/cm3 )から
多孔質ガラス Gelsil の空孔率を 0.4 と求めた。
図 4.16(b) に加圧状態で測定した音速の温度変化の概略を示す。2 K において,
0.06 MPa から 2.30 MPa への圧力増加に伴う音速の減少は 0.1 % にとどまっている。
これは加圧による密度の増加から求められる音速の減少の量よりも小さい。この食い違
64
4.4 音速測定による多孔質ガラス Gelsil 細孔中の 4 He の超流動の観測
いは細孔中の 4 He の弾性定数 C が増加していることを示している。
0.06 MPa では,2 K から温度下降に伴い音速は徐々に上昇し,Tc(1.43 K)で立ち上
がり,低温側では大きな傾きをもって変化している。この音速上昇は孔内の 4 He の超流
動転移に伴い超流動成分が振動から離脱したことによるものである。圧力を増加させる
と Tc は低温側にシフトし,Tc より低温側の音速変化量は大きくなった。圧力 3.75 MPa
より高圧側では,孔内の 4 He は固化しており [13],Tc の音速上昇は不鮮明になる。孔内
に液体が存在せず超流動に伴って離脱する成分が存在しないこの圧力においてもなお,温
度低下に伴う音速の上昇が低温域において観測されている。
4.4.2
4
He 吸着膜状態での音速測定
多孔質ガラス Gelsil の表面に 4 He を吸着させた状態で観測される音速変化について,
超流動に伴う薄膜 4 He の離脱と基板の TLS の寄与により説明する [21, 22]。
トンネル効果モデルでは,TLS を非対称な二重井戸型ポテンシャル中の粒子として取
り扱う。二つの固有状態のエネルギー差は E =
√
∆2 + ∆20 で,ここで ∆ はポテンシャ
ルの非対称性で,∆0 はトンネル振幅を表す。TLS の分配関数は
P (E, u) =
P0
u(1 − u2 )(1/2−µ)
(4.4.1)
と書かれ,ここで P0 は平均状態密度,u = ∆0 /E である。
低温領域では共鳴相互作用が支配的であり,音速の変化は次のように表される。
( )
∆v
T
A
=
ln
v res
1 + 2µ
T0
(4.4.2)
ここで T0 は任意の参照温度で,A は
A=
P0 γ 2
.
ρv02
(4.4.3)
である。ここで γ は one-phonon-TLS 結合係数,ρ は多孔質ガラスの密度,v0 は T0 での
音速である。今回の測定温度領域では共鳴による吸収の温度変化は小さいと考えられる。
高温領域では熱フォノンによる緩和の寄与が重要である。音速の変化と対数減衰率は
65
第 4 章 結果と議論
次のように書かれる。
√
∫
∫
∆v
A
1 − u2
=−
dE
du
v ph
2
ukB T
(
)
E
1
× sech2
2
2kB T 1 + ω 2 τph
√
∫
∫
1 − u2
αph = A dE du
ukB T
(
)
E
ωτp
2
× sech
2 ,
2kB T 1 + ω 2 τph
(4.4.4)
(4.4.5)
ここで ω は音波の角周波数である。フォノンによる緩和時間 τph は
−1
τph
(
2
3
= Ku T F3
E
2kB T
)
(4.4.6)
である [23]。ここで
3
4kB
γ2
π~4 ρv 5
F3 (x) = x3 coth(x).
K=
(4.4.7)
(4.4.8)
である。
共鳴と緩和の寄与による音速変化 ∆v/v|TLS = ∆v/v|res + ∆v/v|ph は音速のピーク
をもたらす。図 4.15 に示した 4 He を吸着させていない空の状態の Gelsil の音速温度依
存性では,音速は温度の下降に伴って対数的に上昇し,ある温度で最大値をとる。この振
る舞いは TLS の寄与により説明できる。ここで定数 A と K はフィッティングパラメー
ターで,µ = 0.2 として適当に選んだ。
4
He を吸着させた状態では,4 He の導入で音速が最大となる温度が空の状態での 0.35 K
から 0.10∼0.15 K に下降した。この変化は音速の温度依存性に対する TLS の寄与にお
いて,異なる定数 A と K を適用することで説明できる。
図 4.17 に膜厚 25.4 µmol/m2 で測定を行った音速と吸収の温度依存性を示す。Tc 以下
では薄膜は超流動を示している。Tc 以下の音速は TLS による音速変化の寄与 ∆v/v|TLS
において,パラメーター A = 5.0 × 10−4 , K = 2.4 × 1010 K−3 s−1 で説明できる。Tc の
前後では音速が 7.0 × 10−4 だけシフトしているが,これは超流動 4 He の振動からの離脱
によるもので ∆v/v|sup とする。一方,音波の吸収については,計算よりも明らかに大き
な振る舞いが見られた。この食い違いは吸収については薄膜 4 He の超流動転移に伴う別
の機構が寄与しているためと考えられる [24, 25]。このように 4 He を吸着させた薄膜領
域での音速の振る舞いについては TLS と超流動転移転移による離脱により説明できる。
66
4.4 音速測定による多孔質ガラス Gelsil 細孔中の 4 He の超流動の観測
(a)
Év
â103
v
0
-2
ëâ103 (Np)
-4
A = 5.0â10 4
T0 = 0.088 K
4v = v
sup
= 7.0â10 - 4
(b)
60
40
20
0
10-1
100
T (K)
図 4.17
吸着膜領域での音速と吸収の温度依存性。面密度は 25.4 µmol/m2 。
実 線 は 本 文 中 の フ ィ ッ テ ィ ン グ 計 算 に よ る も の で ,点 線 は 超 流 動 転 に 伴 う 変 化
∆v/v|sup だけ移動した線である。
4.4.3 加圧状態 4 He での音速測定
加圧された 4 He を多孔体に閉じ込めた状態でも超流動転移に伴う離脱が音速に影響を
与えている。しかし低温領域においては,4 He の超流動成分が飽和していることから,超
流動転移に伴う音速の温度依存性はそれほど大きくないと期待される。吸着膜での実験
で見られた音速のピークは加圧状態での実験でも観測されている。そしてこのピークと
なる温度と,0.5 K 以下の温度領域における音速温度依存性には圧力の変化に依存する
振る舞いはみられていない。つまり,TLS により低温側の音速温度依存性を説明する際,
TLS の寄与が圧力に大きく依存していないことがわかる。
一方 Tc 以上の温度領域では,音速温度依存性は圧力の変化に依存しており,圧力の増
加に伴い音速変化の傾きも増加している。この振る舞いは TLS の寄与に影響を与える,
他の機構の存在を示唆している。0.5 K より高い温度領域では TLS の寄与と実験データ
67
第 4 章 結果と議論
との違いが顕著に見られる。
この 0.5 K より高温領域における温度依存性を説明する機構は明らかでないが,一つ
の可能性として格子欠陥の拡散に伴う音波の緩和現象があげられる。この機構では音速
変化と対数減衰率は次のように書かれる。
∆v
1
= − ϵ∞ C ·
,
v d
2σ0 1 + ω 2 τd 2
πϵ∞ C
ωτd
αd =
·
,
σ0
1 + ω 2 τd 2
(4.4.9)
(4.4.10)
ここで τd は緩和時間で,ϵ∞ は応力 σ0 がかけられたときに釣り合う歪みに対応する。C
は弾性定数である。熱活性化過程を仮定し,アレニウス則により τd を
(
τd = τ0 exp
∆E
kB T
)
,
(4.4.11)
とする。ここで ∆E は活性化エネルギーで τ0 は頻度因子である。
図 4.18 に圧力 4.21MPa での音速温度依存性と吸収を示す。この圧力領域では孔内
の 4 He は完全に固化しているので,液体の超流動成分が存在しておらず音速変化に
寄与しない。0.5 K 以下の領域では TLS による音速変化 ∆v/v|TLS と吸収の大きさ
の振る舞いが再現している。TLS のフィッティングパラメーターは A = 6.4 × 10−4 ,
K = 2.4 × 1010 K−3 s−1 となる。TLS の寄与は図 4.18 では破線で示されるものである。
一方高温領域では音速変化は TLS 寄与から大きく離脱している。この差異を式 4.4.9 で
フィッティングする。TSL の寄与 ∆v/v|TLS と ∆v/v|d との和を実線で示すと,音速変
化を全温度領域において説明できることがわかる。適用した ∆v/v|d のフィッティング
パラメーターは ϵ∞ C/2σ0 = 0.0094, ∆E = 0.9 K and τ0 = 1.8 × 10−8 s である。
細孔内の 4 He が完全に固化せず液体成分が残っている圧力領域についても同様な解析
を行う。3.57MPa 以下の圧力領域では,超流動転移温度 Tc において超流動転移に伴う
振動からの離脱による音速の立ち上がりが観測されている。高圧で細孔内が完全に固化
している圧力領域から,液体が残存している領域まで,音速の温度依存性は連続的な変化
を見せている。また高圧の領域では完全に孔内が固化している状態と非常によく似た音
速変化の振る舞いが観測された。このことから完全に固化した圧力領域で見られる音速
変化の機構を,液体 4 He が孔内に残っている領域に適用できるものと思われる。
0.5K 以 下 の 低 温 側 の 領 域 では 音 速変 化 は ∆v/v|TLS ,Tc 以上 で は ∆v/v|TLS と
∆v/v|d の和,超流動転移に伴う音速変化 ∆v/v|sup が寄与する。ここで超流動転移
による離脱に伴う音速の変化の寄与 ∆v/v|sup は絶対 0 度まで外挿したものである。Tc
以上の温度域において,音速の温度依存性はこれらの和でよく説明できることがわかる。
68
4.4 音速測定による多孔質ガラス Gelsil 細孔中の 4 He の超流動の観測
Év
â103
v
0
-2
60
ëâ103 (Np)
4v = v
-4
-6
d
TLS
(a)
(b)
40
αd
20
0
0
図 4.18
4v = v
α TLS
1
T (K)
2
孔内の 4 He が下善に固化した固化領域での音速温度依存性。図中の各線は本
文中のフィッティング計算によるものである。
このように,孔内に 4 He を加圧状態で閉じ込めた状態では,TLS による寄与と超流動転
移に伴う離脱に加え,熱活性過程による機構により音速の温度依存性を説明できること
がわかる。
4.4.4 熱処理による音速への影響の検討
これまでの議論を受け,RUN1 と RUN2 の音速変化から室温での実験準備段階で試料
に施した熱処理による影響を明らかにする。今回の測定では多孔質 Gelsil は,RUN1 で
は 150 ◦ C で 1.5 時間,RUN2 では 2.5 時間の真空電気炉での乾燥を行った。Gelsil は熱
処理に影響を受け変化し,TLS の寄与にわずかな変化があった。
図 4.19 に RUN1 と RUN2 で測定した加圧状態での音速温度依存性の比較して示す。
いずれの測定でも Tc 以上の温度での温度依存性は圧力の増加に伴い大きくなる傾向が見
える。しかし近い圧力で比較すると RUN2 での温度依存性は RUN1 よりも小さいこと
がわかる。この違いは,前述の音波の緩和の量に対応するパラメーター ϵ∞ C/2σ0 の違
69
第 4 章 結果と議論
0
Run 1
Run 2
MPa
MPa
0.13
0.06
0.66
4v
â103
v
0.40
0.97
0.85
-10
1.57
1.54
2.03
2.01
2.41
2.95
3.57
4.21
-20
5.06
0
1
T (K)
20
1
T (K)
2
図 4.19 RUN1 と RUN2 における音速温度依存性の比較。実線は本文中のフィッ
ティング計算によるものである。
いにより説明できる。この図で実線は ∆v/v|TLS と ∆v/v|d の和を表している。
図 4.20 にフィッティングパラメーターの概要を示す。薄膜領域での測定と加圧領域で
の測定を並べてある。RUN1 と RUN2 のデータをそれぞれ ◦ と 3 で示した。TLS のパ
ラメーター,K と A について,4 He の導入に伴い完全に空の状態から比較して一桁以上
増加する。薄膜領域の A については 4 He 導入にともなう膜厚依存性が見られる。一方加
圧領域においては A と K に圧力依存性は見られていない。
熱活性過程に伴うフィッティングパラメーター ϵ∞ C/2σ0 については,∆E=0.9 K,
τ0 = 1.8 × 10−8 s として計算を行った。ϵ∞ C/2σ0 は薄膜領域ではゼロで,加圧状態に
おいて圧力の上昇に伴い増加する傾向が見られた。また,パラメーターの圧力依存性は
70
4.4 音速測定による多孔質ガラス Gelsil 細孔中の 4 He の超流動の観測
n (µmol/m 2 )
P (MPa)
(a)
4
(b)
Run 1
Run 2
(c)
solid
liquid
2
0
30
20
10
0
10 9
10 10
0
K
5â10 -4 0
A
0.005
0.01
" 1C 2û 0
図 4.20 フィッティングパラメーターの面密度,および圧力依存性。RUN1 と RUN2
のデータをそれぞれ ◦ と 3 で示してある。
RUN1 が RUN2 より大きい。注目すべき点として,この緩和の量を示すパラメーターの
圧力依存性は細孔内の 4 He が固化する時点においても不連続な変化を見せず,単調に増
加している点が上げられる。すなわちこのパラメーターには,孔内の固体液体 4 He の周
囲,基板との間に存在する何らかの緩和過程の寄与があるものと考えられる。
4.4.5 多孔質 Vycor ガラスとの比較
これらの結果を多孔質 Vycor グラスの観測結果と比較する。多孔質 Vycor に 4 He を
吸着させた状態で音速を測定した結果では,音速がピークを持つ温度は空の状態で 1K
だったものが,34 µmol/m2 まで 4 He を導入することで 0.3K に変化することが報告され
ている [22]。この変化は TLS の緩和が増加することによるとされる。一方で孔内の 4 He
が固化する加圧状態においては,格子欠陥の拡散による応力緩和が存在する [11]。この活
性化エネルギーは 14.2 K と求められており,この値は加圧下のバルク 4 He の中の格子欠
陥の拡散についての値と一致している [26]。
今回,多孔質 Gelsil に 4 He 吸着させた測定では,同様の振る舞いが観測されている。
71
第 4 章 結果と議論
音速が最大となる温度は真空状態での 0.35 K から,4 He の導入に伴い 0.1 K から 0.15 K
付近までシフトしている。そして加圧領域では超音波応力の緩和現象が見られる。しか
しながら,本実験においては活性化エネルギー ∆E は 0.9 K であったが,これは多孔質
Vycor に 4 He を閉じ込めたケースと比較すると一桁以上小さい。Beamish らは活性化エ
ネルギーを吸収ピーク温度の周波数依存性から求めており,本研究においては活性化エ
ネルギーを低温領域での音速温度依存性から求めた。求められるエネルギーは低い方の
極限であることが考えられる。音速の温度依存性は単一の活性化エネルギーでよく説明
されており,これは今回の測定条件下においては低い活性化エネルギーによる緩和現象
が発生していることを示している。起源としては,不活性 4 He 層か,不活性層との境界
面に由来すると考えられる。この機構の寄与による音速変化が,孔内の 4 He が圧力増加
に伴い液体から固体に変わる領域でも連続的な変化を示すこととも整合する。
4.5 細孔内の 4 He の超流動と試料状態依存性
図 4.21 に,本研究で得られた Gelsil 中の 4 He の超流動相図を示す。RUN1 と RUN2
の超流動転移温度 Tc をそれぞれ ¤ と ◦ で示してある。また比較のため山本ら報告の超
流動転移温度と固化融解曲線を重ねて示している [12, 13]。低圧域では二つの測定ではほ
ぼ同じ Tc を観測しているが,超流動転移温度の圧力依存性は,RUN1 に対して RUN2
には大きな圧力依存性があり,圧力により大きく超流動が抑制されていることが分かる。
図 4.22 で,RUN1 と RUN2 で観測された超流動の振る舞いについて比較する。薄膜
領域においては,Tc の膜厚依存性については二つの測定でほぼ一致している。このこと
から試料の熱処理の影響は表面積には影響を与えていないと言える。その一方で,超流
動転移に伴う音速の変化 ∆v/v|sup については,RUN2 は 1.45 倍した量が RUN1 と一致
している。これは,超流動転移後にも基板の振動から離脱しない成分,χ ファクターが熱
処理によって減少したことを示唆している。RUN2 においては 1 − χ,すなわち超流動の
測定にかかる成分の割合はおよそ 25 % と見積もられる。加圧領域においては,低圧では
RUN1 と RUN2 ではほぼ同じ Tc を示すが,加圧に従って 2 測定の Tc は離れ,RUN2 の
方が超流動の抑制がより大きく観測された。 ∆v/v|sup も同様な振る舞いが観測された。
このように,事前の熱処理が異なる試料を比較すると,超流動の抑制はそれぞれで異な
る振る舞いを見せることが分かった。低圧の圧力領域ではその違いは小さなものである
が,圧力の増加とともにその違いは大きくなる。また音波の緩和にかかるパラメーターが
熱処理の差異で増減することが分かる。この機構の寄与による音速変化が,孔内の 4 He
が圧力増加に伴い液体から固体に変わる領域でも連続的な変化を示すことから,この緩
72
4.5 細孔内の 4 He の超流動と試料状態依存性
5.0
Tfo*
Tmc*
P (MPa)
4.0
Tc*
3.0
Tc (Run 1)
2.0
Tc (Run 2)
1.0
0.0
0.0
図 4.21
1.0
T (K)
2.0
多孔質ガラス Gelsil 中の 4 He の超流動相図。RUN1 と RUN2 の超流動転移
温度 Tc をそれぞれ ˜ と ◦ で示した。比較のため山本ら報告の超流動転移温度と凝固
融解曲線を*に示した [12, 13]。
和機構の起源は不活性 4 He 層か,不活性層と孔内 4 He との境界面に由来すると考えられ
る。基板の熱処理の差異は基板表面ポテンシャルの状態に影響を与え,そこからさらに
基板に吸着した 4 He 不活性層の状態に差異をもたらしていると考えられる。
ここで,図 4.23 に,Tc と前述の緩和の量を表すフィッティングパラメーター ϵ∞ C/2σ0
との関係を示す。ここから分かるように,ϵ∞ C/2σ0 と Tc は,RUN1 と RUN2 ともに同
じ線上に一致することが分かる。試料の熱処理の差異による超流動抑制の振る舞いの変
化は,表面状態に関連した緩和に関わるパラメーターで説明できる。つまりこの緩和に
関わるパラメーターが同一であるなら,試料の熱処理,基板の状態の変化に依存せず,超
流動の抑制が決定されると言える。これは超流動の抑制現象には,緩和機構の起源であ
る不活性層と孔内 4 He との境界面の状態が強く関与していることを示唆するものである。
この場合考えられる描像としては,孔内で超流動に転移する液体 4 He4 He が壁から感じ
る,有効な孔径が不活性層の増減により変化している可能性が考えられる。圧力の変化
により有効な孔径の増減が起こり,超流動の抑制量に変化が発生するというものである。
また,1.3.2 節で述べたように,この多孔質ガラス Gelsil 中の 4 He の超流動抑制現象は
73
第 4 章 結果と議論
n (µmol/m 2 )
P (MPa)
(a)
(b)
Run 1
Run 2
4
2
0
30
20
10
0
0
Run 2â1.45
0.001 0.002 0
4v=v
図 4.22
sup
0.5 1 1.5
Tc (K)
熱処理が異なる試料の 4 He 超流動性の比較
LBEC による説明が提案されている。LBEC との関連では,多孔質ガラス Gelsil の表面
ポテンシャルの状態が LBEC の発現に大きく関与しているといえる。
74
4.5 細孔内の 4 He の超流動と試料状態依存性
Tc (K)
2
Run 1
Run 2
1.5
1
0.5
0
0.005
0.01
" 1C 2û 0
図 4.23 超流動転移温度を観測された緩和の量の関数として示す。熱処理の条件が異
なる RUN1 と RUN2 で,超流動転移温度が一線上に一致し,緩和の量と超流動転移
温度との間に強い関連があることが分かる。
75
第5章
結論
本研究では多孔体ガラスである Gelsi ガラスに 4 He を閉じ込め,超音波とねじれ振り
子を組み合わせた手法を用いて超流動現象の測定を行った。
同時測定の結果,多孔体ガラス Gelsil の中に閉じ込めた 4 He の超流動に関して,音速
変化とねじれ振り子による測定から圧力温度相図を詳細に確定した。測定周波数にかか
る影響は認められなかった。
超音波測定により,多孔体ガラス Gelsil に 4 He を吸着させた状態では音速の温度依存
性が TLS の寄与と超流動 4 He の離脱により説明できることを明らかにした。薄膜領域
では TLS の効果は 4 He の面密度に依存して大きくなり孔内が完全に 4 He で満たされる
と一定となった。
多孔体内の 4 He が固化した状態では,音速は温度低下とともに上昇し,ある温度で吸
収は最大化した。この振る舞いは音波の応力の緩和現象により説明できた。またこの緩
和現象は 4 He が液体の状態の圧力領域でも観測されている。これらの振る舞いから,こ
の緩和現象は Gelsil ガラスの孔表面に在する 4 He の不活性層に由来するものであると言
える。
事前の準備にかかる熱処理方法が異なる試料の比較により,熱処理の違いが引き起こ
す基板表面の状態の変化が緩和現象の圧力依存性に影響を与えていることを明らかにし
た。また Gelsil 細孔中の 4 He の超流動抑制現象は,この不活性層に由来する緩和の量に
よって説明できた。多孔質ガラス Gelsil 中の 4 He の超流動抑制の機構は,緩和現象の起
源である不活性層との境界の状態に依存していることが明らかになった。超流動の抑制
現象を説明する LBEC と,基板表面のポテンシャルの状態との関連が深いことを示唆す
るものである。この研究により制限された空間に置かれた 4 He の超流動現象について,
その基板の状態が超流動に影響する機構の一端を明らかにできたと言える。
77
謝辞
本論文は筆者が電気通信大学大学院,量子・物質工学専攻の博士後期課程に在籍して
いた期間に行った研究成果をまとめたものです。研究を総括するにあたり,長期間にわ
たった研究生活でお世話になりました沢山の方々に深く感謝申し上げます。
まず主任指導教員である鈴木勝先生にお礼申し上げます。先生には卒業研究からの長
期にわたり,物理の初歩から実験技術,最後の論文執筆まで,あらゆる面でご指導と激励
をいただきました。日頃の行いがとても良くない学生,院生だった私を見捨てることな
く,この学位論文の完成まで導いてくださいました。心より深く感謝申し上げます。
副指導教官の浅井吉蔵先生には,常日頃から気にかけていただき,研究生活に関する助
言と励ましをいただきました。また,隣接分野での共同研究の機会を与えて頂き,私の持
つ実験技術で貢献することができました。これは非常によい経験となりました。深く感
謝申し上げます。
鈴木研究室の谷口淳子先生には,研究に関する様々な相談に乗っていただき,また論文
執筆に関して多大なご協力をいただきました。先生のご助力と激励,助言のおかげで私
は学位論文の執筆までたどり着くことができました。深く感謝申し上げます。
慶應義塾大学の白濱圭也先生には,本研究の要となる試料をご提供いただきました。ま
た研究を進めるにあたり慶應大の研究グループの皆様には何度も議論の時間を取ってい
ただき,研究方針に関するアドバイスをいただきました。厚く御礼申し上げます。
研究室で共同して研究を行った,当時学部から博士前期課程に在籍していた深沢聡君,
齋藤順倫君に深く感謝申し上げます。止まることのない長期間にわたる連続実験を乗り
切るためには,信頼できる共同研究者の存在がとても重要です。深澤君らは安心して実
験を分担できる,とても優秀な共同研究者でした。ありがとうございました。
低温室の成澤孝敏先生と技術職員の島浩一さんには,実験を行うにあたり大量に必要
となる寒剤を絶えることなく安定して供給していただきました。盤石の寒剤供給体制の
おかげで,安心して心おきなく低温実験を進めることができました。厚く御礼申し上げ
ます。
79
第 5 章 謝辞
隣接分野で共同研究を行った当時浅井研究室の大学院生だった Thant Sin Naing 君,
当時青山学院大学の堀金和正博士にも感謝申し上げます。自分の実験技術を生かすこと
のできる多様な分野の研究に携わることができ,非常によい経験となりました。
私と関係した全ての皆さんに感謝申し上げます。先輩である木村敏昭さんとは共に超
音波測定技術を初歩から勉強しました。自由奔放な木村先輩の研究生活から学んだこと
はたくさんあります。細見斉子博士には研究に関する助言や励ましをいただき,また趣
味のネコの話まで,様々な面でおつきあいいただきました。大学院同期の滝沢伸次君,渡
和久君にも感謝申し上げます。博士後期課程への進学を決めた時,また単位取得退学を
決めた時,私を激励してくださいました。共に楽しい研究生活を送ることができた,沢山
の皆さんに感謝いたします。
最後に,先の見通しを立てられず,諦め悪くあがいていた私の研究生活を最後まで物心
両面で支えてくれた両親と弟妹に,心より深く感謝申し上げます。またいつも側にいて
心の支えとなってくれたさゆりさんにも,この場を借りて感謝申し上げたいと思います。
80
付録 A
圧電現象と圧電体の振動
本測定では超音波の励起と検出のために,圧電体である LiNbO3 を超音波振動子とし
て利用した。この章では,圧電現象と圧電体の振動について説明する。[27, 28]
A.1 圧電現象とは
結晶性の物質に応力を加えると,結晶のひずみによって結晶内の電荷の相対位置が変
位する。ここで,結晶が対称中心を持つものであれば歪みも対称的となり分極しないが,
そうでない結晶では電気分極が生じる。
このとき内部では,機械的なエネルギーが電気的なエネルギーに変換された事になる。
このような性質を一般に圧電性と呼び,圧電性を持つ物質を圧電体という。また,逆に圧
電体に電場をかけると,イオンが電場に引かれて変位するため結晶に歪みが生じる。この
場合は電気的なエネルギーが機械的なエネルギーに変換されたといえる。この性質は逆
圧電性と呼ぶ。これらの性質を利用した物が超音波測定で利用した超音波振動子である。
A.2 異種現象間の結合
一般に 2 系に結合がある場合,相互作用はエネルギーの変換の一種である。ここでは
結合は,物理的変数の変化という形で行われる。このエネルギー変換は準静的変換に分類
され,この場合系の自由エネルギー F は 2 系の物理的状態変数によって一義的に決まる。
今,その系の状態変数(示量変数)を η, χ とする。2 系に結合があるという事は自由
エネルギーをこの 2 変数で微分したもの ∂ 2 F/∂η∂χ がゼロでないということである。
81
付録 A 圧電現象と圧電体の振動
F (η, χ) を展開すると
F (η, χ) =
このとき,一般に k 2 =
a212
a11 a12
1
1
a11 η 2 + a12 ηχ + a22 χ2
2
2
(A.2.1)
を結合係数という。
■ 次に, η, χ に共役な力を(示強変数) H, X とすると,自由エネルギーの全微分は
dF = Hdη + Xdχ
(A.2.2)
と与えられ,H と X は
H=
∂F
,
∂η
X=
∂F
∂χ
(A.2.3)
となり,具体的にこの場合では
H = a11 η + a12 χ,
X = a12 η + a22 χ
(A.2.4)
2 式をつなぐ係数 a12 が系同士の結合を表す。また a11 , a22 は,2 つの系のおのおの独立
な定数でスチフネス定数(逆感受率)と呼ばれる。結合がない,2 系が独立している場合
では,測定される逆感受率は a11 , a22 であるが,結合がある系でも η あるいは χ を一定
にして測定すれば同様の定数が得られる。
η
χ
ただしこの場合では,一定にした変数を肩に添えて a11 , a22 と書く。これらは,相手
方の示量変数の変化を抑制した条件で測定したものであるので,それぞれの系の本来的
なスチフネス定数と考えられる。
■ ところで,式 A.2.4 は独立変数を (η, χ) にとったが,他に
(η, X), (H, χ), (H, X) にとることができる。式 A.2.4 を (H, χ) 型に変換すると次のよう
になる。
(
η=
1
aX
11
)
(
H−
a12
aX
11
)
(
χ,
X=
a12
aX
11
)
(
H+
aη22
a2
− 12
aX
11
)
χ
(A.2.5)
X の表式の χ の係数は,前出の結合係数を利用すると次のように表す事ができる。
η
aH
22 = a22 −
a212
= aη22 (1 − k 2 )
X
a11
(A.2.6)
これは H 一定の条件で測定される χ 一定のスチフネス定数である。この場合では,相
手の系の示量変数が一定のスチフネスと示強変数が一定のスチフネスは,結合係数によっ
て 1 − k 2 でつながる事がわかる。
82
A.2 異種現象間の結合
A.2.1 結合のない系の表現
実際の物理の系で独立したものを考え,状態式をどのように表現できるか考察する。
■力学系の表現
力学系の状態を表す変数には,示量変数では歪み Sij ,示強変数では
応力 Tij がある。いずれも 2 階のテンソルで次のように定義される。
1
Sij =
2
(
∂uj
∂uj
+
∂xi
∂xi
)
(A.2.7)
ここで ui は変位である。
応力と歪みの間には弾性的な関係があり,次式で関連づけられる。
Tij = cijkl Skl ,
Sij = sijkl Tkl
(A.2.8)
ここで cijkl , sijkl はそれぞれ弾性スチフネス定数,弾性コンプライアンス定数で 4 階の
テンソルである。(B.1 を参照されたい。)
■電気系の表現
電気系の状態を表す変数には,示量変数では電束密度 Di と分極 Pi ,
示強変数では電界 Ei がある。いずれもベクトルで次式で関連づけられる。
Di = εij Ej ,
Ei = βij Dj
(A.2.9)
誘電率 εij と,逆誘電率 βij は 2 階のテンソルである。
A.2.2 複数の系の結合の表現
電気系と力学系に結合がある場合を考える。この場合先に扱ったように熱力学関数か
ら出発してエネルギーのやりとりのある 2 系の結合を考察する。
独立変数として示強変数の組,応力と電場 (T, E) をとると,これに対応する熱力学関
数はギプスの自由エネルギー G(T, E) である。内部エネルギーを歪みと電束密度(示量
変数)の関数 U (S, D) とすると
G = U − Tij Sij − En Dn
(A.2.10)
dG = −Sij dTij − Dn dEn
(A.2.11)
全微分は
83
付録 A 圧電現象と圧電体の振動
で与えられ,
(
Sij = −
∂G
∂Tij
)
(
,
Dn = −
E
∂G
∂En
)
(A.2.12)
T
2 系が線形で結合している範囲では (0, 0) 付近で次式で展開できる。(式 A.2.1 に対応
する。)
1
G=
2
(
)(
)
∂
∂
∂
∂
+ En
+ Em
Tij
Tkl
G
∂Tij
∂En
∂Tkl
∂Em
(A.2.13)
式 A.2.12 にこの展開された関数を適用すると,歪みと電束密度について次の関係式を得
られる。
Sij = sE
ijkl Tkl + dmij Em
(A.2.14)
Dn = dnkl Tkl + εTnm Em
(A.2.15)
ここで係数 d は圧電定数で,次のように定義される。
(
dnij = −
∂2G
∂Tij ∂En
)
(
=
∂Dn
∂Tij
)
(A.2.16)
E
これは電束密度の変化から応力の変化を結ぶ定数であるが,逆に歪みの変化から電場
の変化を結ぶ定数 d′nij を考える。
d′nij
(
=
∂Sij
∂En
)
(A.2.17)
T
これは逆圧電効果である。効果,逆効果の間に相反則が成り立つので d′nij = dnij となる。
A.3 圧電基本式
前節で求められた関係式,式 A.2.14 と式 A.2.15 は,独立変数に(応力,電場)を選び
導き出された,(歪み,電束密度)との間の関係式である。選ぶ独立変数に応じて熱力学
関数を適切に選べば,同様の種々の関係式が得られる。これらを圧電基本式という。
独立変数をどのように選ぶかによって,圧電基本式の元になる熱力学関数が変わり,求
められる基本式の型も違ってくる。図 A.1 にまとめて示す。電束型と分極型との違いは,
電気的変数の示量変数に電束密度を選ぶか分極を選ぶかの違いによる。
A.4 圧電体の振動
圧電体を振動子として用いる際,振動の特性は素子の形状などの境界条件から決まる。
素子の特性を,境界条件と圧電基本式から求める方法について述べる。
84
A.4 圧電体の振動
図 A.1
図 A.2
圧電基本式の諸形式 [28]
圧電体の板の縦効果厚み振動
A.4.1 板の縦効果厚み振動
振動の解析の一例として,図 A.2 の形状の圧電体を考える。この圧電体は電場を x 軸
に加えると x 軸方向で厚みが変わる方向に変形する (縦効果)。本測定で用いた縦波の超
音波振動子の運動に対応するものである。
85
付録 A 圧電現象と圧電体の振動
適当な圧電基本式と境界条件,運動方程式から振動と電気的特性を求める。
力学的,電気的条件は,側面は固定され歪みがゼロ,電束密度は縦方向に均一である。
S2 = S3 = 0,
∂D1
=0
∂x1
(A.4.1)
また,厚み方向の電位差 V は
∫
t
2
V =
− 2t
E1 dx1
(A.4.2)
この条件を考慮して,圧電基本式は (S, E) 型を選ぶ。歪み,電束密度について,1 軸
方向のみ考える。
■運動の解析
T1 = cE
11 S1 − e11 E1
(A.4.3)
D1 = εS11 E1 + e11 S1
(A.4.4)
圧電基本式を変形して,1 軸方向の変位について以下の運動方程式を考
える。
ρ
∂ 2 u1
∂T1
=
2
∂t
∂x1
式 A.4.3 から電場 E1 を変形により消去し,S1 =
(A.4.5)
∂u1
∂x1
である事に注意すると,この運動
方程式は
2
∂ 2 u1
D ∂ u1
=
c
11
∂t2
∂x21
(A.4.6)
cE
11
,
1 − kt2
(A.4.7)
ρ
と変形できる。ここで cD
11 は
cD
11 =
kt2 =
e211
S
cD
11 ε11
kt2 は電気機械結合定数である。
境界条件は,電極は自由端だとすると
t
x1 = ± の時, T1 = 0
2
u1 (x1 , t) = u10 (x1 )ejωt のように時間分離して考えると,運動方程式の解は
(ω )
e11 D10
1
(
)
(
)
u10 (x1 ) = D S ω
sin
x1
v
c11 ε11 v cos ωv 2t
(A.4.8)
(A.4.9)
√
但し v(音速)=
86
cD
11
ρ
(A.4.10)
A.4 圧電体の振動
■電気系の解析
電束密度の時間変化を D1 = D10 ejωt と分離する。
回路を流れる電流は,電極の面積を S とし,電束密度を電極表面で積分して
∫
∫
b
I1 = jω
b′
dx2
0
dx3 D1 = jωSD1
(A.4.11)
0
すると D1 は
I1
, あるいは
jωS
D1 =
D10 =
I10
jωS
(A.4.12)
圧電基本式??を電場について変形する。
1
e11 ∂u1
− S
S
ε11
ε11 ∂x1
E1 =
(A.4.13)
但しここでは,歪みを微分で表している。
この式 A.4.13 を式 A.4.2 に代入して実際に計算する。時間変化を分離すると,次のよ
うになる。
∫
V0 =
t
2
− 2t
[
( )
(
)]
e11
t
t
E10 dx1 = S D10 − S u10
− u10 −
2
2
ε11
ε11
t
(A.4.14)
これに A.4.12 を代入して,適当に変数をまとめると,電極間電位差と電流の関係式を作
れる。
1
V0 =
jωC0
(
)
2 tan β
1 − kt
I10
β
(A.4.15)
但しここでは
C0 =
εS11 S
,
t
β=
ωt
,
v2
kt2 =
e211
S
cD
11 ε11
(A.4.16)
アドミッタンスは
Y =
I10
jωC0
=
β
V0
1 − kt2 tan
β
(A.4.17)
Y = Y0 + Yp とすると,それぞれの成分は
Y0 = jωC0 ,
Yp = jωC0
β
kt2 tan
β
β
1 − kt2 tan
β
(A.4.18)
87
付録 A 圧電現象と圧電体の振動
Y0 は圧電体が元から持つ静電容量によるアドミッタンス成分,Yp は振動する圧電体が持
つ機械的なアドミッタンスである。
共振する条件は, Yp が最大になることである。式 A.4.18 を変形して Yp が最大にな
る条件を求める。
1
Yp = jωC0
1
β
kt2 tan
β
−1
(A.4.19)
この式から, Yp が最大になる条件は
1
β
kt2 tan
β
−1=0
(A.4.20)
kt2
=0
β
(A.4.21)
すなわち
cot β −
この条件に合う β を求めたいが,簡単には解けないので以下のように近似する。結合定
数 kt2 は一般に小さい。そこで kt2 を無視して β0 を出す。
β0 =
cot を
π
2 (2n
π
(2n + 1)
2
(A.4.22)
+ 1) のまわりで展開する。
cot
(π
2
)
(2n + 1) + ∆β = −∆β
(A.4.23)
式 A.4.21 を用いて式変形すると
∆β = −
2
kt2
π (2n + 1)
β = β0 + ∆β なので,共振振動数を ωRM とすると
)
(
ωRM t
π
4
kt2
β=
= (2n + 1) 1 − 2
v 2
2
π (2n + 1)2
となる。
88
(A.4.24)
(A.4.25)
付録 B
試料内を伝播する音波
試料内に伝搬する超音波の伝播方程式を説明する。その後付録 C において理想的な試
料の振幅周波数依存性,すなわち共鳴カーブを計算により求める。計算では図 2.5 のよう
な,平行な端面に超音波振動子を取り付け,片方から超音波を入射しもう片方から音波を
検出するような状態を考える。
B.1 固体中を伝播する超音波
固体中を伝わる超音波の伝播方程式について説明する [29]。考える固体は簡単のために
均一な連続体と見なし,内部の歪みと働く応力との間の関係について,図 B.1 のような直
方体を例に考える。ある面 j に働く i 方向の応力を Tij と書くことにする。i, j = 1, 2, 3
とし,それぞれ (x, y, z) の直交座標に対応させる。歪み Sij は, 回転するだけで物質にな
んら変形が起こらない場合 (∂ui /∂xj と ∂uj /∂xi の大きさが等しく異符号の場合) を取
り除くために, 次式で定義される.
1
Sij =
2
(
∂ui
∂uj
+
∂xj
∂xi
)
(B.1.1)
ここで ui は i 方向の変位である。この式は対称性から Sij = Sji となり,独立な S の
成分は次式で示す 6 個である。
S11
S12
S13
S12
S22
S23
S13
2S1
1
S6
S23
=
2
S5
S33
S6
2S2
S4
S5
S4
2S3
(B.1.2)
ここで右辺と左辺の表現の違いは,左辺が Sij といったテンソル表記であるのに対して,
右辺は添え字が 1 つの表現「工学的表記」と呼ぶものである。
89
付録 B 試料内を伝播する音波
x3
-T11(x1)
T11(x1+dx1)
x1
dx3
x1 dx
2
dx1
x1+dx1
図 B.1
x2
弾性体に働く応力
続いて応力についてその表現方法を説明する。固体に働く力,応力を表現するために
は,ベクトルとしての力(向きと大きさ)だけではなく力が働く面を定義する必要があ
り,テンソル(あるいは添え字 1 つの工学的表記)で表現する。図 B.1 のように,外力
を与えられた物体の内部に任意の体積を考える。このとき,+xi 面に +xj 方向に作用す
る単位面積当たりの力を応力と呼び Tij で表す。なお,この考えている任意の体積の面
には正負の符号があり,−xi 側の面は −xi 面と呼ばれる。この固体が静止しているとす
れば,並進運動に対する平衡条件から
Tij = T−i−j
(B.1.3)
であるとともに, 回転運動に対する平衡条件から
Tij = Tji
(B.1.4)
が導かれる. よって, Tij の独立な個数は 6 個になるから, 歪み Sij と同様に工学的表記で
T11
T12
T13
T12
T22
T23
T1
T13
T23 = T6
T5
T33
T6
T2
T4
T5
T4
T3
(B.1.5)
と書ける。
変位である歪み S と力である応力 T の間には,応力が十分に小さい範囲ではフックの
法則,比例関係が成り立つ。(バネにおけるバネ定数と力,変位の関係と同じものである)
そしてバネ定数に対応するのが弾性体の場合,次式の行列で表現される定数である。
90
B.1 固体中を伝播する超音波
T1
T2
T3
T4
T5
T6
=
c11
c12
c13
c14
c15
c16
c12
c22
c23
c24
c25
c26
c13
c23
c33
c34
c35
c36
c14
c24
c34
c44
c45
c46
c15
c25
c35
c45
c55
c56
c16
c26
c36
c46
c56
c66
S1
S2
S3
S4
S5
S6
(B.1.6)
ここに現れた 6 × 6 個の cij を弾性 (スティフネス) 定数という。固体に内部摩擦を含む
場合は cij は複素数となる。ただし cij = cji の関係が成立するので,このうち独立なも
のは 21 個である。さらに結晶方位の対称性を考慮すると独立な弾性定数を減らして考え
ることができる。例として,六方結晶の物体を考える。座標軸と結晶軸と同一方向に選
んだ場合,弾性定数は次式の行列の形に省略化することができる。
c11
c12
c13
0
0
0
c12
c11
c13
0
0
0
c13
c13
c33
0
0
0
0
0
0
c44
0
0
0
0
0
0
c44
0
0
0
0
0
0
c66
(B.1.7)
このとき 2c66 = c11 − c12 の関係が成立し,独立な弾性定数は 5 個に減っている。
これと同様に立方晶の結晶を考えると,次式の行列の形に省略化される
c11
c12
c12
0
0
0
c12
c11
c12
0
0
0
c12
c12
c11
0
0
0
0
0
0
c44
0
0
0
0
0
0
c44
0
0
0
0
0
0
c44
(B.1.8)
独立な弾性定数は 3 個となった。
本測定で用いたようなガラス材料は,結晶方位を持たない等方性の媒体である。この
ような物体の場合弾性定数は 2c44 = c11 − c12 が成立し,独立な弾性定数は 2 個にまで
省略化することができる。
変位と力の関係が得られたので,運動方程式を立てて超音波の伝播方程式を求めるこ
とができる。図 B.1 のような微少体積要素を考える。x1 方向に働く応力成分は T11 , T12 ,
T13 である。x1 方向に垂直な面,すなわち 1 面では,次式の正味の力が面積 dx2 dx3 に
働く。
T11 (x1 + dx1 ) − T11 (x1 ) ≃
∂T11
dx1
∂x1
(B.1.9)
91
付録 B 試料内を伝播する音波
他の応力成分にもついても同様な関係が成り立ち,x1 方向に働く正味の力 F1 は各成分
を足し上げ,
(
F1 =
∂T11
∂T12
∂T13
+
+
∂x1
∂x2
∂x3
)
dx1 dx2 dx3
(B.1.10)
となる。微少体積要素の質量は,物体の密度を ρ とすると ρdx1 dx2 dx3 である。これら
を用いると運動方程式を次のように立てることができる。
ρ
∂ 2 u1
∂T11
∂T12
∂T13
=
+
+
2
∂t
∂x1
∂x2
∂x3
(B.1.11)
成分について一般化して,次のように表現する。
∑ ∂Tij
∂ui
ρ 2 =
∂t
∂xj
j=1
3
(B.1.12)
これが音波伝播方程式である。本測定のような等方性の媒質にこの方程式を適用すると,
次のように計算できる。平面波が x1 方向に伝播しているとき,この平面波はこれ以外の
面,x2 , x3 面には力を及ぼさない。つまり
∂
∂
=
=0
∂x2
∂x3
(B.1.13)
この時,式 B.1.12 は次のように簡略化される。
ρ
∂ 2 ui
∂Ti1
=
2
∂t
∂x1
(B.1.14)
次に歪みの定義式 B.1.1 に式 B.1.13 を代入すると
S2 = S3 = 0
(B.1.15)
このときの応力を書き下すと,
T11
T22
T33
T23
T13
T12
=
c11
c12
c12
0
0
0
c12
c11
c12
0
0
0
c12
c12
c11
0
0
0
0
0
0
c44
0
0
0
0
0
0
c44
0
0
0
0
0
0
c44
S11
0
0
S23
S13
S12
(B.1.16)
この式から T11 , T12 , T13 を求めて式 B.1.14 に代入すると,音波伝播方向と変位方向が同
じ縦波 (longitudinal wave) は
ρ
92
∂u1
∂u1
= c11
2
∂t
∂x1
(B.1.17)
B.1 固体中を伝播する超音波
であり, 音波伝播方向に対して垂直に変位する横波 (transverse wave) は,
ρ
∂u2
∂u2
= c44
2
∂t
∂x1
(B.1.18)
ρ
∂u3
∂u3
= c44
2
∂t
∂x1
(B.1.19)
となる。これらの式から,縦波と横波の伝播速度 vl , vt は次のようになる。
√
vl =
√
vt =
c11
ρ
(B.1.20)
c44
ρ
(B.1.21)
なお,縦波は歪みと共に体積変化を生じるが,横波は体積変化しない成分である。一般に
縦波と横波では弾性定数が異なる。横波より縦波の方が音速が速いことが多い。
93
付録 C
音波の共鳴状態の解析
C.1 試料内を往復する超音波
超音波振動子が角周波数 ω で連続して振動しているとする。この時振動子により励起
された超音波は試料内を伝搬しもう一方の端面に達し,そこで反射し元の端面に戻り反
射し・・・を繰り返し試料内に音波が往復する。
往復する音波を,片道づつ書き下す。試料長は l とする。
(1)
a exp (iωt − iλx)
(2)
(3)
a exp (iωt − iλ (2l − x))
a exp (iωt − iλ (x + 2l))
(4)
..
.
a exp (iωt − iλ (4l − x))
(2n − 1)
(2n)
..
.
a exp (iωt − iλ (x + 2 (n − 1) l))
a exp (iωt − iλ (2nl − x))
(C.1.1)
ここで a は任意定数,n は自然数である。試料内の音波は,これら独立の音波の重ね合
95
付録 C 音波の共鳴状態の解析
わせで表現できる。
Y = a exp (iωt)
[∑
exp (−iλ (x + 2 (n − 1) l))
∑
]
exp (−iλ (2nl − x))
= a exp (iωt)
[
]
∑
∑
× exp (−iλ (x − 2l))
exp (−2iλnl) + exp (iλx)
exp (−2iλnl)
∑
= a exp (iωt) [exp (−iλ (x − 2l)) + exp (iλx)]
exp (−2iλnl)
(C.1.2)
今回は基板に吸収があるので,λ は複素数である。
λ = k − iα
(α ≥ 1)
(C.1.3)
これを C.1.2 に代入すると,
Y = a exp (iωt) [exp (−i (k − iα) (x − 2l)) + exp (i (k − iα) x)]
∑
×
exp (−2i (k − iα) nl)
= a exp (iωt) [exp (− (α + ik) (x − 2l)) + exp ((α + ik) x)]
∑
×
exp (−2 (α + ik) nl)
= a exp (iωt) exp ((α + ik) l) [exp (− (α + ik) (x − l)) + exp ((α + ik) (x − l))]
∑
×
exp (−2 (α + ik) nl)
(C.1.4)
ここで B =
∑
exp (−2 (α + ik) nl) , Z =
∑
exp (−2 (α + ik) l) とおいて
∑
Zn
(
)
1 − Z n+1
−1
= lim
1−Z
Z
=
1−Z
B=
すなわち
B=
96
exp (−2 (α + ik) l)
1 − exp (−2 (α + ik) l)
(C.1.5)
C.1 試料内を往復する超音波
これを C.1.4 に代入する。
Y = a exp (iωt) exp ((α + ik) l) [exp (− (α + ik) (x − l)) + exp ((α + ik) (x − l))]
exp (−2 (α + ik) l)
1 − exp (−2 (α + ik) l)
= a exp (iωt) [exp (− (α + ik) (x − l)) + exp ((α + ik) (x − l))]
×
exp (− (α + ik) l)
1 − exp (−2 (α + ik) l)
= a exp (iωt) [exp (− (α + ik) (x − l)) + exp ((α + ik) (x − l))]
1
×
exp ((α + ik)) − exp (− (α + ik))
×
(C.1.6)
さらにここで次のように置き換える。
C = exp (− (α + ik) (x − l)) + exp ((α + ik) (x − l))
(C.1.7)
D = exp ((α + ik) l) − exp (− (α + ik) l)
(C.1.8)
すると,
Y =a
C
exp (iωt)
D
(C.1.9)
この振幅は
A=
aC
D
(C.1.10)
となる。この C を変形すると,
C = exp (− (α + ik) (x − l)) + exp ((α + ik) (x − l))
= exp (−α (x − l)) exp (−ik (x − l)) + exp (α (x − l)) exp (ik (x − l))
(C.1.11)
ここで次のように置き換える。
b = exp (α (x − l)) + exp (−α (x − l)) = 2 cosh {α (x − l)}
(C.1.12)
d = exp (α (x − l)) − exp (−α (x − l)) = 2 sinh {α (x − l)}
(C.1.13)
すると
C=
b+d
b−d
exp (−ik (x − l)) +
exp (ik (x − l))
2
2
(C.1.14)
97
付録 C 音波の共鳴状態の解析
これをさらに変形する。
b
(exp (ik (x − l)) + exp (−ik (x − l)))
2
d
+ (exp (ik (x − l)) − exp (−ik (x − l)))
2
= b cos {k (x − 1)} + id sin {k (x − 1)}
C=
(C.1.15)
d, b をそれぞれ代入して,
C = 2 [cosh {α (x − l)} cos {k (x − l)} + i sinh {α (x − l)} sin {k (x − l)}]
(C.1.16)
一方 D についても,同様の変形を行う。
D = exp ((α − ik) l) − exp (− (α − ik) l)
= exp (αl) exp (ikl) − exp (−α) exp (−ikl)
(C.1.17)
ここで次のように置き換える。
b = exp (αl) + exp (−αl) = 2 cosh {αl}
(C.1.18)
d = exp (αl) − exp (−αl) = 2 sinh {αl}
(C.1.19)
すると D は
b+d
b−d
exp (ikl) +
exp (−ikl)
2
2
b
d
= (exp (ikl) + exp (−ikl)) + (exp (ikl) − exp (−ikl))
2
2
= d cos {kl} + ib sin {kl}
D=
(C.1.20)
d, b をそれぞれ代入して,
D = 2 [sinh {αl} cos {kl} + i cosh {αl} sin {kl}]
(C.1.21)
以上より求められた C, D を A に代入する。
A=
cosh {α (x − l)} cos {k (x − l)} + i sinh {α (x − l)} sin {k (x − l)}
a
sinh {αl} cos {kl} + i cosh {αl} sin {kl}
(C.1.22)
x = l では
a
sinh {αl} cos {kl} + i cosh {αl} sin {kl}
sinh {αl} cos {kl} − i cosh {αl} sin {kl}
=
a
sinh2 {αl} cos2 {kl} + cosh2 {αl} sin2 {kl}
A=
98
(C.1.23)
C.2 共振カーブの位相回りの補正
αl ≪ 1 と仮定すると
A=
αl cos {kl} − i sin {kl}
2
{αl} cos2 {kl} + sin2 {kl}
a
(C.1.24)
ここで
k=
nπ
+ ∆k
l
(C.1.25)
とおくと,
A=
αl cos {nπ + ∆kl} − i sin {nπ + ∆kl}
a
2
{αl} cos2 {∆kl} + sin2 {∆kl}
αl cos {∆kl} − i sin {∆kl}
n
=
(−1) a
2
2
2
(αl) cos {∆kl} + sin {∆kl}
(C.1.26)
ここで ∆kl ≪ 1 より
A=
αl − i∆kl
2
n
2
(αl) + (∆kl)
(−1) a
(C.1.27)
ところで,この A は,式 C.1.9 の振幅,すなわち往復する超音波の振幅を複素数表現
した時の振幅であった。共振の条件はこの振幅が最大になる点であるので,∆kl = 0 で
ある。この複素振幅を 0◦ と 90◦ の位相成分に分離して表記すると次式になる。
A0 =
∆kla
2
(αl) + (∆kl)
2
A90 =
αla
2
2
(αl) + (∆kl)
(C.1.28)
この式は周波数 (k) と振幅の関係を意味している。すなわち共鳴カーブの概形の表現で
ある。共振の条件は複素振幅の 0◦ 成分がゼロとなる点であることが計算により確認で
きた。
C.2 共振カーブの位相回りの補正
C.1 で計算した共振カーブは,実際の試料の内部での共振時の音波の振幅を理想的に表
現するものであるが,外部の励起発信器と試料の振動子との距離,検波用超音波振動子か
ら検出 Lock-in Amplifier までの距離を信号が伝搬する間に位相が回り,検出される信号
は計算で得られる理想的な共鳴カーブとは異なる形に観測される。この状態では試料内
の音波の共鳴を正確にとらえることが出来ないので,信号の位相を戻してやる必要があ
99
付録 C 音波の共鳴状態の解析
る。またバックグラウンドの信号の影響でゼロ点がずれていることもあるので,これも
オフセットとして補正する。
検出された信号を 2 つの位相成分の和として,次式のように表記できる。(式 C.1.9
より)
(
)
´
Ý = a A90 − iÁ0 exp (iωt)
(C.2.1)
この振幅が,位相が θ だけ遅れているとすると,位相をそれだけ回して戻してやることで
実際の試料内の振幅を求めることが出来る。位相を θ だけ進ませると,
)
´
Ý exp (iθ) = a A90 − iÁ0 exp (iθ) exp (iωt)
(
)
= a A´90 − iÁ0 {cos θ + i sin θ} exp (iωt)
{(
)
(
)}
´
´
= a exp (iωt) A90 cos θ + iÁ0 sin θ − i Á0 cos θ − A90 sin θ
(C.2.2)
(
よって,位相を戻された位相成分は,それぞれ以下のようになる。
A0 = Á0 cos θ − A´90 sin θ
(C.2.3)
A90 = A´90 cos θ + Á0 sin θ
(C.2.4)
バックグラウンドをずらしているオフセットの補正は,この位相を補正する計算を行う
前にそれぞれの位相成分から差し引くことにより行う。0◦ 成分のオフセットを Xof f set ,
90◦ 成分のオフセットを Y0f f set とすると,最終的な補正は以下の計算を適用することで
求められる。
(
)
(
)
A0 = Á0 − Xof f set cos θ − A´90 − Y0f f set sin θ
(
)
(
)
A90 = A´90 − Y0f f set cos θ + Á0 − Xof f set sin θ
(C.2.5)
(C.2.6)
図 C.1 は,位相回りの補正計算の一例である。点線は直接観測された共鳴カーブをプ
ロットしたもので,理想的な共鳴カーブとは異なる形を示している。このままでは正確
な共鳴点を求めることができないので,上式を適用して位相回りとオフセットを補正す
る。補正した結果は実線でプロットされたグラフである。
位相回り,オフセットともに,最適な値の決定は実際に計算を試行して「見た目」が最
適になるように求めた。
100
C.2 共振カーブの位相回りの補正
2e-05
(A)
Amplitude [V]
1e-05
0
-1e-05
8.05
8.1
8.15
8.2
Frequency [MHz]
2e-05
(B)
Amplitude [V]
1e-05
0
-1e-05
8.05
8.1
8.15
8.2
Frequency [MHz]
図 C.1
位相調節の前後の共鳴カーブ。信号が経路を伝わり検出器で検波されるまで
の経路長の違いなどにより,検出される信号の位相が実際の値より回った状態で観測
される。(A) が実際に測定された共鳴カーブで,(B) 理想的な共鳴カーブの形になる
よう位相回りとオフセットを調節した後の曲線である。
101
付録 D
ヘリウム吸着膜のスリップ現象
超流動性を示さない低密度の 4 He の吸着膜について,4 He が基板振動から離脱し摩擦
を持って運動するスリップ現象が起こることが知られている。これは 4 He の原子間力が
小さいため 4 He 原子と基板との結合が離れやすく,基板の振動により基板との結合が切
り離されるものである。本研究の超音波とねじれ振り子の同時測定において,Gelsil 基板
に低密度の 4 He が吸着した状態で,4 He 吸着膜と Gelsil 基板との間の摩擦現象が観測さ
れた。
D.1 超音波測定による He 吸着膜の摩擦の観測
4
He の吸着膜の摩擦現象の観測は音速測定によって行うことが出来る。音波による基
板の振動から吸着膜が離脱し摩擦を持ってスリップすることで音速と吸収に変化が現れ
る。檜枝らは二次元多孔質基板であるヘクトライト基板上の He 吸着膜について,超音波
測定(パルスエコー法)による音速測定を行い,He のスリップ現象を報告した [30, 29]。
音速測定による基板と 4 He との間の界面摩擦現象の測定は,基板振動から 4 He が離脱し
摩擦を持って運動することで発生する有効密度の変化と吸収を,試料を透過する音波の
音速と吸収の変化で捉えるものである。界面での摩擦に粘性摩擦を仮定すると,スリッ
プ時間 τ と超音波の音速の変化 ∆v/v0 ,吸収の変化 ∆α は次式で与えられる。
{
}
∆v
∆ρ
1
=−
χn +
(1 − χn )
v0
2ρsub
1 + ω2 τ 2
ωτ
∆ρω
·
(1 − χn )
∆α =
2ρsub v0 1 + ω 2 τ 2
(D.1.1)
(D.1.2)
ここで ρsub は多孔体試料の密度,∆ρ は吸着膜の音速に寄与する有効密度,v0 は多孔体
試料の音速,ω は超音波の角振動数である。χn は幾何学的な条件などで決まる定数(χ
103
付録 D ヘリウム吸着膜のスリップ現象
図 D.1
超音波測定によるヘクトライト基板上の He 吸着膜の基板振動に対する応答
状態図 [29]。低密度領域では界面摩擦が観測され,デカップリング温度 TD は面密度
が増加すると低温側に移動する。ある密度以上では超流動転移が観測されており,4 He
の超流動転移温度は記号 + で示してある。
因子)で,界面摩擦が完全にゼロになってもなお基板振動から離脱しない成分の割合で
ある。式 D.1.2 が最大となる,すなわち ωτ = 1 となる温度をデカップリング温度 TD と
し,この時音速の変化は 1/2 となる。
図 D.1 に,檜枝ら報告のヘクトライト基板上に吸着した 4 He と 3 He の基板振動に対
する応答状態図を示した。面密度が低い領域では基板からの離脱と界面摩擦が観測され,
TD は面密度の増加に伴い低温側に移動する。ある面密度で TD は見えなくなり,さらに
高面密度の領域では 4 He の超流動転移が観測されている。超流動転移温度は面密度の増
加に伴い高温側に移動している。
D.2 Gelsil 基板上の 4 He のスリップの観測
本研究 RUN2 の同時測定において,多孔質ガラス Gelsil の基板に吸着した薄膜 4 He が
超流動性を示さない低密度の領域で 4 He の摩擦現象が観測された。図 D.2 は RUN2 の
超音波とねじれ振り子測定の同時測定で観測した,音速の温度依存性とねじれ振り子の
共振周波数の温度依存性である。数字は 4 He の面密度で,22.4 µmol/m2 以下の面密度
では 4 He が不活性層として基板に吸着していて超流動に伴う明瞭な立ち上がりは見られ
104
D.2 Gelsil 基板上の 4 He のスリップの観測
(a) 超音波測定
(b) ねじれ振り子測定
-0.20
-1.0
TD
2
µmol/m
17.9
2
µmol/m
18.7
19.9
20.7
-1.4
19.9
-0.25
∆f (Hz)
∆v/v (%)
18.7
17.9
-1.2
20.7
21.6
21.6
23.2
22.4
22.4
23.2
24.1
-1.6
TC
0
1
24.9
TC
25.8
T (K)
図 D.2
24.1
-0.30
24.9
25.8
2
0
1
2
T (K)
同時測定による Gelsil 基板に吸着した 4 He 吸着膜のスリップ現象の観測。
(a) の超音波測定で測定した音速の温度依存性には 4 He のスリップに伴う音速の上
昇が観測されている。上向き矢印はデカップリング温度 TD に対応する。下向き矢印
は超流動転移温度 TC を示す。(b) のねじれ振り子測定では摩擦に伴う変化は見られ
ない。
ない。しかし音速測定においては,低い面密度の測定で超流動転移とは異なる形の音速
の上昇が観測された。一方,同時に測定しているねじれ振り子測定においては,音速測定
で立ち上がりが見られた面密度,温度でも,明確な変化が見られなかった。
面密度が増加すると音速の立ち上がる温度は低温側に移動し,面密度が 20 µmol/m2
を超えた範囲では立ち上がりが不明瞭となる。この音速の振る舞いは 4 He が基板上を滑
るスリップ現象によるものと思われる。摩擦に伴う音速の上昇は低い面密度の測定にお
いては明確に観測されたが,面密度が増加するに従って上昇が不明瞭である。面密度が
低く音速上昇が明確である 3 つの面密度の測定について高温側から低温側への音速上昇
が 1/2 となる温度をデカップリング温度とし,図 D.2 に上向き矢印で示した。
図 D.3 に本研究において観測された Gelsil 基板上の振動応答に関する相図を示す。低
密度の面密度範囲には 4 He と Gelsil 基板との間で振動から離脱するデカップル相が存在
し,そのデカップル温度は密度が増加すると低温側に移動する。そしておよそ 23 mol/m2
でデカップル相が消滅し,その近傍から高密度の領域では薄膜 4 He による超流動相が観
測された。
105
付録 D ヘリウム吸着膜のスリップ現象
40
n (µmol/m 2 )
30
Superfluid
TC
TD
20
Nomal fluid
Decoupled film
10
0.0
0.5
1.0
1.5
T (K)
図 D.3 超音波測定による Gelsil 基板上の He 吸着膜の基板振動に対する応答状態図。
低密度領域では界面摩擦現象が観測され,デカップリング温度は面密度が増加すると
低温側に移動する。ある密度以上では超流動転移が観測されている。
106
参考文献
[1] 山田 一雄,大見 哲巨 著,『超流動』 (培風館,1995).
[2] P. Kapitza, Nature 141, 74 (1938).
[3] 生嶋 明,シリーズ「液体ヘリウム」,固体物理, vol.11, No.2, 79 (1976).
[4] L. D. Landau, J. Phys. USSR 5, 71 (1941).
[5] L. D. Landau, J. Phys. USSR 11, 91 (1947).
[6] D. G. Henshaw and A. D. B. Woods, Phys. Rev. 121, 1266 (1961).
[7] C. Lie-zhao, D. F. Brewer, C. Girit, E. N. Smith, and J. D. Reppy, Phys. Rev. B
33, 106 (1986).
[8] J. R. Beamish, A. Hikata, L. Tell, and C. Elbaum, Phys. Rev. Lett. 50, 425
(1983).
[9] D. J. Bishop, J. E. Berthold, J. M. Parpia, and J. D. Reppy, Phys. Rev. B 24,
5047 (1981).
[10] E. D. Adams, K. Uhlig, Yi-Hua Tang, and G. E. Haas, Phys. Rev. Lett. 52,
2249 (1984).
[11] J. R. Beamish, N. Mulders, A. Hikata, and C. Elbaum, Phys. Rev. B 44, 9314
(1991).
[12] K. Yamamoto, H. Nakashima, Y. Shibayama, and K. Shirahama, Phys. Rev.
Lett. 93, 075302 (2004).
[13] K. Yamamoto, Y. Shibayama, and K. Shirahama, J. Phys. Soc. Jpn. 77, 013601
(2008).
[14] K. Yamamoto, Y. Shibayama, and K. Shirahama, Phys. Rev. Lett. 100, 195301
(2008).
[15] A. V. Lopatin and V. M. Vinokur, Phys. Rev. Lett. 88, 235503 (2002).
[16] Jacques Bossy, Jonathan V. Pearce, Helmut Schober, and Henry R. Glyde Phys.
Rev. B. 78, 224507 (2008).
107
参考文献
[17] I. Iwasa, H. Koizumi, T. Suzuki, Rev. Sci. Instrum. 59, 356 (1988).
[18] 白濱 圭也, 固体物理, vol.30, No.6,532 (1995)
[19] J. D. Reppy, Physica 126B, 335 (1984).
[20] G. C. Straty and E. D. Adams, Rev. Sci. Instrum. 40, 1393 (1969).
[21] W. A. Phillips, J. Low Temp. Phys. 7, 351 (1972). See also, P. Esquinazi (Ed.),
Tunneling Systems in Amorphous and Crystalline Solids (Springer, 1998).
[22] N. Mulders, E. Moltz, and J. R. Beamish, Phys. Rev. B 48, 6293 (1993).
[23] Jäckle, Z. Physik 257, 212 (1972).
[24] D. J. Bishop and J. D. Reppy, Phys. Rev. Lett. 40, 1727 (1978).
[25] N. Mulders and J. R. Beamish, Phys. Rev. Lett. 62, 438 (1989).
[26] B. A. Fraass, P. R. Granfors, and R. O. Simmons, Phys. Rev. B. 39, 124 (1989).
[27] 細見 斉子, 『グラファイト基板上の He 吸着膜のスリップ現象』学位論文, 電気通信
大学 (2003)
[28] 池田 拓郎 著,圧電材料学の基礎 (オーム社,1984)
[29] 檜枝 光憲, 『ヘリウム吸着膜の摩擦』学位論文, 電気通信大学 (2001)
[30] M. Hieda, T. Nishino, M. Suzuki, N. Wada, and K. Torii, Phys. Rev. Lett. 85,
5142 (1989).
108
関連論文の印刷公表の方法及び時期
1. T. Kobayashi, J. Taniguchi, A. Saito, S. Fukazawa, M. Suzuki, K. Shirahama:
“Ultrasound Measurements of 4 He Confined in a Nano-porous Glass”
Journal of Physical Society of Japan, Vol. 79, No. 8, 084601 (August 2010).
2. T. Kobayashi, A. Saito, J. Taniguchi, M. Suzuki, K. Shirahama:
“Simultaneous Measurements of an Ultrasound and a Torsional Oscillator for
Pressurized 4 He in a Nanoporous Glass”
Journal of Low Temperature Physics, Vol. 158, No. 1-2, pp. 250-255 (January 2010).
3. T. Kobayashi, J. Taniguchi, M. Suzuki, K. Shirahama:
“Simultaneous Measurements of an Ultrasound and a Torsional Oscillator for
4
He in a Nanoporous Glass”
Journal of Low Temperature Physics, Vol. 148, No. 5-6, pp. 797-801 (September 2007).
著者略歴
小林 利章 (こばやし としあき)
1981 年 1 月 29 日 長野県に生まれる
2003 年 3 月
電気通信大学 電気通信学部
量子・物質工学科 卒業
2003 年 4 月
電気通信大学大学院 電気通信学研究科
量子・物質工学専攻 博士前期課程入学
2005 年 3 月
電気通信大学大学院 電気通信学研究科
量子・物質工学専攻 博士前期課程修了
2005 年 4 月
電気通信大学大学院 電気通信学研究科
量子・物質工学専攻 博士後期課程入学
2009 年 3 月
電気通信大学大学院 電気通信学研究科
量子・物質工学専攻 博士後期課程 単位修得のうえ退学
© Copyright 2026 Paperzz

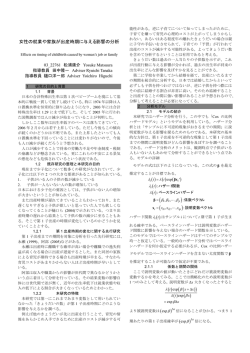
![名前:解答例 問題6 (1) 純アルミニウムにおいては、 eV /atom]、ASV /R](http://s3.paperzz.com/store/data/005656799_1-6de218d9e340e146495f2f9cbf2e9e02-250x500.png)