情報通信と符号化
韓 承鎬
2016 年 7 月 5 日
1
目次
第1章
情報通信の歴史と発展
2
1.1
電信以前の通信 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2
1.2
電信の発明 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3
1.3
海を越えた通信の実現 . . . . . . . . . . . . . . . . . . . . . . . . . . .
4
1.4
電話機の発明 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5
1.5
マルコーニの無線電話 . . . . . . . . . . . . . . . . . . . . . . . . . . .
5
1.6
通信のデジタル化
. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5
第2章
現代通信システムの構成
7
2.1
標本化 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7
2.2
量子化 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8
2.3
情報源符号化/復号化 . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9
2.4
暗号化/暗号復号化 . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
10
2.5
通信路符号化/復号化 . . . . . . . . . . . . . . . . . . . . . . . . . . . .
11
2.6
変調/復調 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
12
2.7
多重化/逆多重化 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
12
2.8
通信路 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
12
確率
15
3.1
標本空間と事象 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
15
3.2
確率 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
17
3.3
確率変数 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
18
加法性白色ガウス雑音通信路での最適受信
22
4.1
加法性雑音通信路モデル . . . . . . . . . . . . . . . . . . . . . . . . . .
22
4.2
最適な MAP 受信機 . . . . . . . . . . . . . . . . . . . . . . . . . . . .
25
4.3
加法性白色ガウス雑音 (AWGN) 通信路での受信 . . . . . . . . . . . . .
26
信号のスペクトル
29
二次元平面での基底 . . . . . . . . . . . . . . . . . . . . . . . . . . . .
30
第3章
第4章
第5章
5.1
2
目次
5.2
三角関数基底 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
31
5.3
複素指数基底とフーリエ変換
. . . . . . . . . . . . . . . . . . . . . . .
33
5.4
三角関数基底と複素指数基底の比較 . . . . . . . . . . . . . . . . . . . .
35
5.5
周期方形波のスペクトル . . . . . . . . . . . . . . . . . . . . . . . . . .
38
5.6
非周期方形波信号のフーリエ変換 . . . . . . . . . . . . . . . . . . . . .
42
5.7
信号の周期性と離散特性 . . . . . . . . . . . . . . . . . . . . . . . . . .
43
標本化定理
46
6.1
インパルス信号 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
46
6.2
畳み込み . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
48
6.3
標本化定理 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
52
量子化
56
線形量子化 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
57
ディジタル変調方式
60
8.1
MASK 変調 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
61
8.2
MFSK 変調 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
66
8.3
MPSK 変調
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
67
8.4
QAM 変調 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
70
8.5
ビットラベリング
. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
74
第9章
多重アクセス方式
76
9.1
周波数分割多重アクセス (FDMA) . . . . . . . . . . . . . . . . . . . . .
77
9.2
時間分割多重アクセス (TDMA) . . . . . . . . . . . . . . . . . . . . . .
78
9.3
符号分割多重アクセス (CDMA) . . . . . . . . . . . . . . . . . . . . . .
80
情報源符号化
83
第6章
第7章
7.1
第8章
第 10 章
10.1
情報源符号化定理
. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
83
10.2
情報源符号化の例
. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
84
10.3
Kraft 不等式 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
86
10.4
Huffman アルゴリズム . . . . . . . . . . . . . . . . . . . . . . . . . . .
87
通信路符号化
89
第 11 章
11.1
パリティ検査による誤り検出
. . . . . . . . . . . . . . . . . . . . . . .
90
11.2
二重パリティ検査符号による誤り訂正 . . . . . . . . . . . . . . . . . . .
91
11.3
最小距離復号 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
94
11.4
一般的なパリティ検査符号 . . . . . . . . . . . . . . . . . . . . . . . . .
96
3
第1章
情報通信の歴史と発展
1.1 電信以前の通信
電信や伝書鳩以前,通信は視覚に頼ったものが多かった.ギリシャでは,松明リレーで
戦果を伝え,アジアの日本や中国では狼煙台を立てて,煙で外敵の侵攻を知らせた.当時
の政府にとって通信の保持は,軍隊の維持と同じように国家の統治上,欠かせないもの
だったのであった.
1790 年には,フランス人技師クロード・シャツプ(Claude Chappe)が考案した腕木
通信機が実用化に成功し,18 から 19 世紀にかけて欧米の主な通信方式となった.100 年
後の 1890 年頃になると,フランスは総距離 4800km をカバーする 556 の腕木信号局網を
有していたが,それは図. 1.1 のように,柱に上下に動けるようにした腕木をつけた腕木
通信機を数十 km ごとに配置したものであった.そして,文字を腕木の形状に対応させ,
図 1-1
腕木通信機
第 1 章 情報通信の歴史と発展
その形状の変化を望遠鏡*1 で読みとり,リレー 式に伝達していくという通信方法である.
1.2 電信の発明
1831 年,イギリスではマイケル・ファラデー(Michael Faraday)が電磁誘導の実験を
行い,電磁場の基礎理論を確立すると,高速に伝わる電気を使った通信方式の研究が始
まった.
その翌年,歴史画家として名が知られていたサミユエル・モールス (Samuel Finley
Breese Morse) は,大西洋横断中の船内で,電磁気学の話を聞き,電信機の開発に加わる.
そして,1836 年に人間の言葉を「トン」と「ツー」のわずか二種類の符号の組み合せに置
き換えて通信を行う電信機を開発し,改良を加えた上に 1840 年には特許を取得する.そ
れから,モールスは各国に自分の電信機の売り込みに走っていたが,フランスは腕木信号
局網があり,イギリスではウィリアム・クック(William Fothergill Cooke)が発明した
五針電信機による電信網の開通を待っていた.
五針電信機電信は,1837 年 5 月にクックとチャールズ・ホイートストン(Charles
Wheatstone)が共同に特許を取得しているが,最初に商業化された電信とされている.
それは図.1-2 のように盤面に五個の磁針をならベ,電気の強弱で動く針の組み合せによっ
て文字を送るものであリ,1839 年にパディントン駅からウェスト・ドレイトンまでの間,
約 21km にわたってグレート・ウェスタン鉄道の線路を利用して敷設された.
モールスの通信機は,フランスとイギリスでは実用化されなかったが,捨てる神あれば
拾う神あり( When one god deserts you, another will pick you up)と,モールスはつ
いにアメリカ政府直営の通信業務開始にこぎつけた.そして,1845 年元日,ワシントン
から約 64km 離れた港湾都市ボルチモアとの間の電信開通式に参加し,「トン・ツー 」と
電文で聖書の中にある言葉をボルチモアへ送った.
“What hath God wrought!”
118 年後の 1963 年 8 月 23 日,アメリカは宇宙にシンコム通信衛星を打ち上げ,全世界
との即時通話を実現するが,開通記念通話にあたり,ケネディ大統領は,モールスが打っ
た電文と同じ言葉を,最初のメッセージにしている.
モールス通信機は,五針電信機のような文字盤方式に直接文字を読み取れるのもではな
く,モールス符号を覚えないとならなかったので,発明当初は人気がなかった.ところ
が,電信の出現に先立って産業革命の旗手として 1830 年に運行が始まった鉄道が急速に
ヨーロッパ全土に普及し,電信は列車の安全運行のために,列車運行を一元的に確保する
手段として使われていた.その結果,電信は鉄道の普及に平行し,鉄道沿線に拡大され,
各地をつなぐ電信網を形成するようになり,1852 年のイギリスは全長 6500km の電信網
*1
望遠鏡は,オランダの眼鏡屋ハンス・リッペルスハイ(Hans Lippershey)によって 1608 年に発明され
たが,イタリアのガリレオ・ガリレイ(Galileo Galilei)はこれを改良し,天体観測を行った.
4
第 1 章 情報通信の歴史と発展
5
図 1-2
五針電信機
を有し,ヨーロッパの他の国も 1845 年から 1852 年かけて電信網を完成した.
遠距離伝送と,電信の商業化により通信文が多量になると,電流を「トン・ツー」と打
つだけで伝送するモールス方式が,故障も少なく電信線の長距離建設が容易であることよ
り電信の王座を独占してしまう.
1.3 海を越えた通信の実現
陸で繋がっているところへの通信が実現できると,人類は海を越える電気通信の時代に
踏み込む.1851 年,イギリス人のジョン・ブレット(John Brett)によって英仏海峡の
カレーとドーバー間約 50km に海底電線が敷設され,英国とヨーロッパは情報面で一体化
されたことになる*2 .
ドーバー海峡に海底電信を敷設してから 6 年後,サイラス・フィールド(Cyrus West
Field)は大西洋横断ケーブルの敷設に挑戦する.フィールドは 1857 年から,アメリカと
イギリスの船で米巡洋艦ナイヤガラと英船アガメムノンは,ニューファンドランドとアイ
ルランドの間に海底ケーブル敷設のため出航する.二度のケーブル切断事故に遭って,翌
年にケーブル敷設するが,二ヶ月後には通信ができなくなる.結局,海底電信の大西洋横
断に成功するは,8 年後の五度目の挑戦である.
*2
パリで通信社に勤めていたロイターは,ドーバー海峡横断電信開設を聞きつけると,パリの通信社をやめ
て翌年ロンドンに移り,今日の世界的通信社であるロイター通信を設立する.
第 1 章 情報通信の歴史と発展
1.4 電話機の発明
モールス符号は,長距離電信に適しているが,符号を取扱うには技術を習得するための
訓練が必要である.それで,だれでもがすぐに扱える通信機械として,文字よりも手っ取
りばやい音声そのものの伝達手法の開発が始まる.しかし,当時の物理学者や電気学者の
大勢は,周波数の高い人聞の声を電気を使って伝達することに否定的であった.
このような学界の常識にお構いなく,聾者教育に従事していたアレクサンダー・グラハ
ム・ベル(Alexander Graham Bell)は,音波と同じ波形の電流を生成するための実験を
行い続ける.そして,28 歳の時羊皮紙をぴんと張り,鉄心に電線を巻いたコイルを接続し
て,送話器とする電磁石式電話機ー「絞首台電話機」を発明し,1876 年 2 月 14 日ワシン
トンの特許局に特許申請を行った.その後,ベルは雑音の多い電磁石式電話機から実用化
できる液体電話機を発明し,アメリカ建国 100 周年を祝う建国記念博覧会に液体電話機を
出品した.翌年の 4 月 3 日にはボストンーニューヨークの間に電話が開通されるが,翌々
年には発明王エジソンが炭素を使って送話器の性能を飛躍的に向上させたので,電話の普
及は一段と早まった*3 .
1.5 マルコーニの無線電話
電線を使って電信と電話の実用化に成功したら,つぎは電線を使わないで同様のことが
できないかと考える.1887 年,ドイツの物理学者ハインリヒ・ルドルフ・ヘルツ(Heinrich
Rudolf Hertz)が電磁波の存在を実験的に証明すると,1896 年にイタリアの物理学者グ
リエルモ・マルコーニ(Guglielmo Marconi)は,電気火花による電磁波で「トン・ツー 」
のモールス符号を送る無線通信を発明した.マルコーニに 1 年先立って,ロシアの Popov
が無線通信に成功するが,自国のロシア政府への献策が入れられなかった.それに対し
て,マルコーニはイタリアで彼の成果に興味を持つ者は少ないと,時第一の工業国の英国
に渡り事業化に成功する.
1901 年,英国のイングランドから発信した無線のニューファンドランドでの受信に成
功し,大西洋横断を果たすと,1906 年には発明王エジソンの助手をしていたレジナルド・
オーブリー・フェッセンデン(Reginald Aubrey Fessenden)は,持続して電波の出る周
波数発生器を製作し無線電話を発明する.
1.6 通信のデジタル化
ベルやエジソンの発明した送話器を使うと音声の波を同じ波形の電気信号に変換するこ
とができるので,電話回線通じてその信号を遠く離れたところへ届け受話器を鳴らせば,
*3
当初は複雑な電話機を一般人が操作できるか,記録が残らないので大事なことを託すことができるか,な
ど否定的意見も多かった.
6
第 1 章 情報通信の歴史と発展
もとの音声を復元できる.
人間の音声は,50Hz∼20kHz の振動があるが,現在の電話回線では,人間の声を 300Hz
∼3400Hz の周波数の範囲でとらえて送るように国際的に取り決めている.アナログ方式
と呼ばれている従来の方式では,音声の娠動を 300Hz∼3400Hz の周波数の電気信号に置
き換えて,受話者側に伝送され受話器で音声に復元される.
アナログ方式では,いったん波形が崩れると,受信側には波形の原形がどのようなも
のか判断できないので修正の方法がない.このようなアナログ方式の欠点を克服すべ
く,1937 年,アメリカの ITT (国際電信電話会社)パリ研究所のイギリス人リーブス
(Alec Harley Reeves)は,アナログ信号をデジタル信号に変換する PCM(pulse code
modulation)通信方式の理論を完成し特許を取得した.しかし,デジタル方式は処理が
複雑になる欠点はあったため,発明同時は実現が困難となり,PCM 理論が実用化される
までには,さらに 20 年*4 ほどの歳月が必要だった.
1946 年ペンシルパニア大学で,重量 30 トン,長さ 30m の世界最初の電子計算機ーエ
ニアック(ENIAC)が誕生すると,二年後にベル電話研究所のウィリアム・ショックレイ
(William Bradford Shockley Jr.)が,トランジスタを発明するが,それはまた 1959 年
の集積回路 IC (Integrated Circuit)へ発展し,LSI(Large Scale IC)時代に突入する.
コンピュータとの結合を技術的に好都合にさせているなどの理由より,デジタル方式の
• 保存が容易
• 軽度の損傷は修復可能
• 処理が容易
• 処理中の品質劣化が起こらない
などの利点が顕著になり,通信もデジタル時代を迎える.
一方,1948 年にクロード・シャノンが “A Mathematical Theory of Communication”
で数学の道具を通信に導入し,情報理論の学問分野を確立したら,それは効率の良い通信
を実現するための灯台となる.
*4
リーブス自身もこの発明を「はやすぎた発明だった」と,後日語っている.
7
8
第2章
現代通信システムの構成
一昔のアナログ通信システムでは,人の声や送信したい画像を電流の強弱に変換し,通
信路を通して送信していたが,現在ではほとんどの通信システムがデジタル通信方式を取
り入れている.図.2-1 はデジタル通信システムの基本構成とその機能を示す.
デジタル通信システム
標本化
連続値
連続時間
信号
情報源
符号化
量子化
連続値
離散時間
信号
補完
離散値
離散時間
信号
暗号化
情報源
符号語
情報源
復号化
通信路
符号化
通信路
符号語
暗号
符号語
暗号
復号化
変調
通信路
復号化
多重化
通信路
復調
逆多重化
図 2-1 現代の通信システム
我々が現在取り扱う信号には,イーザーネットで送受信されるパソコンからの信号のよ
うなデジタル信号と,映像や声などのアナログ信号がある.図.2-1 で示したデジタル通信
システムの部分で送受信するには,入力された信号が時間的に離散化され、有限な集合か
ら値を取るデジタル信号である必要がある.その故に,パソコンからのデジタル信号はデ
ジタル通信システムで直接取り扱うことができるが,アナログ信号については標本化と量
子化が必要となる.以下,各構成要素の機能を述べる.
2.1 標本化
図 2-2 で 示 し た よ う な 時 間 的 に 連 続 な 信 号 x(t) を 離 散 的 な 時 間 で の x(t) の 値 ,
x(t0 ), x(t1 ), · · · , を用いて表現することを標本化と呼ぶ.その目的は,時間的に連続
なアナログ信号をデジタル通信システムで送信できるように時間軸上で離散化することで
あるが,直感的には標本化間隔を狭くすると復元した信号と元の信号の歪みは少なくなる
第 2 章 現代通信システムの構成
9
x
x(t)
t0 t1 · · ·
図 2-2
t
標本化/補完
が,伝送すべき標本値が多くなる.それで,Nyquist (1924) はいかに少ない標本値で,元
の信号を歪みなく復元できるかを考え,次の定理を与えた.
定理 1. 標本化定理情報信号 x(t) の帯域を B とすると,時間間隔 Ts ≤
1
2B
で抽出
した標本から情報信号を完全に復元できる.
定理では触れてないが,標本値を sinc 関数と呼ばれる波形で補完を行えば,元の信号が
歪みなく復元できるのである.
2.2 量子化
図 2-2 での標本値,x(t0 ), x(t1 ), · · · , は通常実数の値を取り,このようなデータはデジ
タル通信システムで送信できない.デジタル通信システムで扱うには {0, 1} のように,値
が取り得る集合が有限である必要があり,このような実数の値から有限集合の値に変換す
る操作を量子化と呼ぶ.
ここで注意したいことは,信号の集合が有限であることで,信号の値が有限である必要
はない.
第 2 章 現代通信システムの構成
babababababababababababababababab
例えば,次の五つの場合を考える.
1. x(t) ∈ R
2. x(t) ∈ [0 1]
3. x(t) ∈ Z+
4. x(t) ∈ {π/2, π}
5. x(t) ∈ {0, 1}
1. は実数から値を取るので,デジタル通信システムで扱えないが,2. の場合に
も 0 から 1 の有限の区間には無限の数が含まれているので,この場合にもデジ
タル通信システムで送信できない.3. の場合にも正の正数となる数は無限にあ
るが,現れる確率の分布によってはデジタル通信システムで扱える場合があるa .
4. は値自体が無理数なので送信される数字が無限に続くが,送信側で π/2 → 0,
π → 1 に置き換え,受信側で逆の操作をすると,5. と同じく扱える.
a
2. の場合と異なり,この無限集合は加算的 (countable) である.
標本化と異なり,歪みなく元の値を復元できる量子化の方法はないが,信号の出力が
−∞ < x(t) < ∞ と有界である場合,x(t) の最小値と最大値を同じ間隔で区切り,一番近
い区切りの値で x(t) を近似する線形量子化の場合,量子化ビットが 1 ビット増えると信
号対雑音比は 6dB 改善する.
2.3 情報源符号化/復号化
量子化された有限集合に M 個の要素があると仮定し,各要素を 0, 1, 2, · · · , M − 1 と
番号付け,各々の要素を送信する代わりに,各要素の順序を送信し,受信側で元の要素を
復元すれば,デジタル通信方式で扱う情報は,0, 1, 2, · · · , M − 1 の整数を二進数展開し
たビット列として考えることができる.この時に,情報を冗長な表現を省いたもっとも短
いビット列で表すことが望ましい.このように情報源からの入力を圧縮する操作を情報源
符号化と呼ぶ.
10
第 2 章 現代通信システムの構成
11
babababababababababababababababab
情報源 X = {x0 , x1 , x2 , x3 } を
E1 (x0 ) = 00
E1 (x1 ) = 01
E1 (x2 ) = 10
E1 (x3 ) = 11
と符号化すると,各情報源の出現確率に関係なく,平均符号長は 2 である.し
かし,情報源の確率が
1
2
1
Pr{X = x1 } =
4
1
Pr{X = x2 } =
8
1
Pr{X = x3 } =
8
Pr{X = x0 } =
となる場合,符号器
E2 (x0 ) = 0
E2 (x1 ) = 01
E2 (x2 ) = 011
E2 (x3 ) = 111
の平均符号長は
L̄2 =
1
1
1
7
×1+ ×2+2× ×3=
2
4
8
4
となり,符号器 E1 よりさらに効率よくなる.
情報源符号化は復号後に歪みがあるかによって,無歪み符号化と歪み符号化に分類さ
れ,情報源の冗長度がない場合,0 と 1 は独立で出現確率は同じになる.
2.4 暗号化/暗号復号化
情報の安全性を必要とする通信システムでは,情報源の符号語に対して暗号化を実施す
る.初期の段階では,メッセージを送る人が鍵を作成し,安全な通信路を通じて受け取り
側に鍵情報を渡した.
第 2 章 現代通信システムの構成
babababababababababababababababab
シフト暗号は,平文の英文字を k 個ずらした文字を送る方法である.例えば,
k = 2 のシフト暗号で HELLO を暗号化すると JGNNQ になる.
英文字の順序
ABCDEFGHIJKLMNOPQRSTUVWXYZ
このように,送信側と受信側が鍵を密かに共有する暗号化方式を秘密鍵暗号と呼ぶが,
秘密鍵暗号は鍵の伝送途中漏れる可能性がある上,頻度解析などで鍵が破れるリスクが
ある.
それで,1970 年代に開発されたのが,SSH などで使われている公開鍵暗号である.公
開鍵暗号では,メッセージを受け取る側が公開鍵(錠)と秘密鍵(鍵)を作り,公開鍵は
誰にでも公開する.メッセージを受け取るには秘密鍵が必要となるが,その鍵は公開鍵か
らは計算できない仕組である.
2.5 通信路符号化/復号化
情報源符号語もしくは暗号文は,その後通信路符号化を行うが,その目的は入力された
ビット列に組織的に冗長度を加えることで,雑音や干渉への耐性を強めることである.
babababababababababababababababab
通信路符号器に入力されるのは,ビット列であることから,入力された 0 か 1
を奇数回繰り返す繰り返し符号を考える.
1. 0 が現れたら (000) を, 1 が現れたら (111) を出力する.
2. 0 が現れたら (00000) を, 1 が現れたら (11111) を出力する.
符号化される前は雑音の影響で 0 が 1 に受信されたら,判定誤りを引き起こす
が,1. の 3 回繰り返し符号の場合,雑音の影響で (000) が (010) と受信された
場合には多数決で送信ビットが 0 であると判定できる.送信ビットを 5 回繰り
返す 2. の場合には,訂正できる符号語ビット数が 2 ビットに増える.
情報ビット k ビットを n ビット,n ≥ k ,の符号語に変換した場合,取り入れた冗長度
は符号化レート k/n で評価できる.一般的に,符号化レートが低いほど雑音に強くなる
が情報ビットの伝送速度は遅くなる.
12
第 2 章 現代通信システムの構成
13
2.6 変調/復調
符号化されたデータは,変調器で通信路の上で伝搬しやすい形に変換され,通信路を通
じて伝送される.実際のほぼすべての通信は電気/電磁波信号で行われているため,変調
の主要な目的はビット列を電気信号の波形に変換することである.例えば,通信路符号器
から 0 が出力されたら波形 s0 (t) を送信し,1 が出力された場合には s1 (t) を送信する.
このような,符号語の各ビットを単独に通信路で送信される方式を二値変調と呼ぶ.一
方,変調器は M = 2Q 個の異なる波形 si (t), i = 0, 1, · · · , .M − 1, M > 2 を用いて一回
に Q ビットの符号語列を送信することもできるがこのような方式は多値変調と呼ぶ.
通信路はそれぞれ通しやすい周波数があり,信号は基本的に正弦波(余弦波)
s(t) = A cos(f t + θ)
(2-1)
の形式で通信路に送信されるが,(2-1) が振幅,周波数,位相の変数を持つことから変調
方式も振幅変調,周波数変調,位相変調及び正弦波と余弦派の変数を組み合わせた直行振
幅変調 (QAM) 方式などが存在する.
2.7 多重化/逆多重化
複数のユーザが同一の通信路を通じて通信を行うとき,情報を希望の相手に届けるため
には多重化が必要となる.携帯電話の場合,第一世代のアナログ通信で使われた FDMA
方式では,周波数を同時に通信するユーザに重複なしに割り当て,受信機でフィルタを用
いることで希望信号を取り出した.第二世帯からデジタル通信方式となるが,最初に使わ
れた TDMA 通信方式では,通信路を使用する時間を複数のスロットに分割して各ユーザ
に割り当てることでユーザ間の干渉を抑制した.その後に登場した CDMA と呼ばれる第
三世代通信方式では,ユーザを区別するために拡散系列と呼ばれる符号を割り当てたが,
ユーザ間干渉を完全に抑えることが困難のことから現在の第四世帯では直行周波数分割
(OFDM) 方式と呼ばれるシステムが採用されている.
2.8 通信路
信号が送信機から受信機に伝わるに必要な電話線,同軸ケーブル,電磁波,光ファイ
バーなどの物理的な媒体を通信路と呼ぶ.これらの通信路の共通な特性は雑音の影響を受
けることである.その原因は,受信機の熱雑音,人為的な妨害,大気雑音など様々である
が,どちらも固定の値を持たず,ランダム性を持つ.
雑音の他にも,通信路は帯域制限があるため送信された信号は歪んでしまう場合が多
く,高速移動時にはドップラー効果により、事変性をもつ厳しい通信環境となる.
通信システムの特徴を簡潔に記述する数学モデルでよく使われているのは次の三つで
ある.
第 2 章 現代通信システムの構成
14
2.8.1 加法性雑音通信路
最も簡単な通信路は図 2-3 で示した送信信号 s(t) に可能性ランダム雑音 n(t) が加わっ
たものである.物理的に,加法性雑音は受信機の電子装置と増幅器などから入るが,電子
Channel
r(t) = s(t) + n(t)
+
s(t)
n(t)
図 2-3 AWGN 通信路
装置に起因する雑音は熱雑音の特性を持つ.統計的に熱雑音はガウス過程に属するので,
この種の通信路を加法性ガウス雑音通信路と呼ぶ.
2.8.2 線形フィルタ通信路
電話線などの物理的な通信路ではユーザ間干渉を防ぐために,信号の送信時にフィルタ
を用いる.このような通信路は図 2-4 で示した加法性雑音を伴う線形フィルタ通信路とな
る故に,入力信号 s(t) に対して,出力信号は
r(t) = ∫
s(t) ∗ c(t) + n(t)
∞
=
−∞
c(τ )s(t − τ )dτ + n(t)
(2-2)
となる.ここで,c(t) は線形フィルタのインパルス応答で ∗ は畳み込みを示す.
s(t)
Linear
filter
c(t)
Channel
図 2-4
+
r(t) = s(t) ∗ c(t) + n(t)
n(t)
加法性雑音を伴う線形フィルタ通信路
2.8.3 線形時変フィルタ通信路
水中や電離層などを介した信号は時変多重反射の影響を受けるので,この種の通信路は
線形時変フィルタと等価である.フィルタのインパルス応答を c(τ ; t) で表すと,これは
第 2 章 現代通信システムの構成
15
時間 t における時刻 t − τ のインパルスに起因する応答である.図 2-5 で示す加法性雑音
を伴う線形時変フィルタ通信路で,入力信号 s(t) に対する通信路出力は
r(t) = ∫
s(t) ∗ c(τ ; t) + n(t)
∞
=
−∞
c(τ ; t)s(t − τ )dτ + n(t)
(2-3)
となる.
Linear
time-variant
filter c(τ ; t)
s(t)
+
n(t)
Channel
図 2-5
r(t)
加法性雑音を伴う線形時変フィルタ通信路
電離層や移動通信での通信路は,(2-3) の特殊な場合で
c(τ ; t) =
L
∑
ak (t)δ(τ − τk )
(2-4)
k=1
となる.ここで {ak (t)} と {τk } はそれぞれ,L 個のパスの中の k 番目のパスの振幅と遅
延を表す.この場合,(2-4) を (2-3) に代入し
c(τ ; t) =
L
∑
k=1
が得られる.
ak (t)s(t − τk ) + n(t)
(2-5)
16
第3章
確率
一枚のコインを N 回投げ,表が出た回数 fN を数えると,N が大きくなるにつれて,
fN /N は一つの値 0.5 に近づいていく.フォン・ミーゼス(1882-1953)はその収束先を
もって,確率を次のように定義した.
確率の頻度概念
定義 1. 同一の条件で,繰り返し実験が可能なときに,当該事象 E に対する相対度数
fN が,N が大きくしたときに一定値に収束するならば,その値をもって当該の事象
の確率
P = lim fN /N
n→∞
を与える.
3.1 標本空間と事象
サイコロを投げる実験のように,結果がランダムに起きるような実験を試行もしくはラ
ンダムな実験と呼び,試行の結果生じうる個々の結果を標本点とか根本事象と呼び ω で
表す.標本点の全体の空間を標本空間と呼び Ω で表す.
babababababababababababababababab
上記の例では,各標本点に番号をつけ,ωi =(i の目) とおくと,標本空間は
Ω = {ω1 , ω2 , ω3 , ω4 , ω5 , ω6 }
となる.
サイコロを投げて出た目が偶数である確率を求める場合,標本点の集まりを
E = {ω2 , ω4 , ω6 }
(3-1)
第 3 章 確率
17
とおくと,この E は,“偶数の目が出た” という事象を表す.実験の結果,E の中の標本
点が生じれば,事象 E が起きたという.このように,ある性質をもったいくつかの標本点
の集合を事象と呼ぶ.空集合 ∅ は空事象とよび,Ω は全事象と呼ぶ.
標本空間 Ω での2つの事象 E,F に対して,次のような事象を定義する.
1. 和事象:E ∪ F
事象 E もしくは F の標本点のどれかが生じたときに和事象が生じたという.
2. 積事象:E ∩ F
事象 E と F の両方に属する標本点が生じたときに積事象が生じたという.
3. 補事象:Ē
事象 E に属しない標本点の集まりを Ē と書き,E の補事象という.補事象に関し
ては次のことが成り立つ.
• E ∪ Ē = Ω
• E ∩ Ē = ∅
¯=E
• Ē
4. 差事象:E\F
事象 E に属し,F には属さない標本点の集まりを差事象とよぶ.
上の定義より演算の順序に関する結合律と分配率が確かめられる.
• 結合律
(E1 ∪ E2 ) ∪ E3 = E1 ∪ (E2 ∪ E3 )
(E1 ∩ E2 ) ∩ E3 = E1 ∩ (E2 ∩ E3 )
• 分配律
(E1 ∪ E2 ) ∩ F = (E1 ∩ F) ∪ (E2 ∩ F)
(E1 ∩ E2 ) ∪ F = (E1 ∪ F) ∩ (E2 ∪ F)
babababababababababababababababab
次の法則を証明せよ.
E1 ∪ E2 = Ē1 ∩ Ē2
証明:
ω ∈ E1 ∪ E2 とすれば,ω ∈ Ē1 かつ ω ∈ Ē2 なので,ω ∈ Ē1 ∩ Ē2 である.し
たがって,E1 ∪ E2 ⊂ Ē1 ∩ Ē2 である.逆も同様に言えるので,左辺と右辺の集
合は一致する.
第 3 章 確率
18
3.2 確率
事象 E の起こりやすさを Pr{E} と書き,E の起きる確率という. 尺度 Pr{E} は次の性
質を満たす.
確率
定義 2. 次の公理(コルモゴロフの公理)を満たす Pr{ } を確率という.
1. 任意の事象 E に対して,0 ≤ Pr{E} ≤ 1
2. 全事象 Ω に対して,Pr{Ω} = 1
3. 共通の標本ない事象 E,F に対して,Pr{E ∪ F} = Pr{E} + Pr{F}
コルモゴロフの公理から次の性質が導かれる.
• 任意の事象 E に対して,Pr{E} + Pr{Ē} = 1
• 任意の事象 E, F に対して,Pr{E} = Pr{E ∩ F} + Pr{E ∩ F̄}
• E ⊂ F のとき,Pr{E} ≤ Pr{F}
• 任意の事象 E, F に対して,Pr{E ∪ F} = Pr{E} + Pr{F} − Pr{E ∩ F}
条件付確率
定義 3. 事象 E, F に対して,Pr{F} ̸= 0 のとき
Pr{E|F} =
Pr{E ∩ F}
Pr{F}
(3-2)
で定義される Pr{E|F} を事象 F が起きる条件下での事象 E の条件付確率という.
定義式を書き直した
Pr{E ∩ F} = Pr{E|F} Pr{F} = Pr{F|E} Pr{E}
(3-3)
は確率の積の公式という.
独立事象
定義 4. 事象 F に事象 E に関数する情報が含まれてないとき,つまり
Pr{E|F} = Pr{E}
(3-4)
のとき,事象 E と F は独立であるという.
互いに独立な事象 E, F に対して
Pr{E ∩ F} = Pr{E} Pr{F}
が成り立つ.
(3-5)
第 3 章 確率
19
定理 2. 事象 E と F に対して,事象 F が起きる前の事象 E の確率 Pr{E} を事前確
率といい,事象 F が起きたあ後での事象 E の確率 Pr{E|F} を事後確率とよぶ.ベ
イズ定理によれば,事象 F の事後確率は
Pr{F|E} =
Pr{E|F} Pr{F}
Pr{E}
(3-6)
で計算される.
3.3 確率変数
確率変数,分布関数
定義 5. 標本空間 Ω で定義された実数値関数 X(ω) を確率変数という.試行の結果
ω が確定すると,確率変数 X は一つの値 X(ω i ) に定まるが,この値を X(ω) の実
現値という.任意の一次元区間 I = (a, b] において,事象
E = {ω|X(ω) ∈ I}ω ∈Ω
が生じる確率 Pr{E} を確率変数 X(ω)(記述の便宜上 X と記する) の確率分布 とい
い,I = (−∞, x] のときの確率関数
FX (x) := Pr {X(ω) ∈ (−∞, x]}
(3-7)
を X の分布関数とよぶ.
第 3 章 確率
20
babababababababababababababababab
サイコロを5回投げる実験について考える.各回サイコロは {1, 2, 3, 4, 5, 6} の
いずれの目が出るので,5回投げた結果の標本空間は
Ω = {(1, 1, 1, 1, 1), (1, 1, 1, 1, 2), · · · , (6, 6, 6, 6, 6)}
となる.このときに1の目が出る回数を変数 X を持って表すと,標本 ω =
(3, 5, 2, 1, 6) の実現値は X = 2,標本 ω = (5, 1, 3, 1, 2) の実現値は X = 2 で
ある.
このときに X のとり得る値は,I = {0, 1, 2, 3, 4, 5} であリ,1 の目が n 回出る
事象を考えると,I = {n}, n ∈ I となり,E が生じる確率は
( )n ( )5−n
1
5
Pr{E} = n C5
6
6
である.また,分布関数は
FX (x) =
⌊x⌋
∑
n C5
n=0
( )n ( )5−n
5
1
6
6
で与えられる.
1. 離散的な場合
確率変数 X のとり得る値が x1 , x2 , · · · と番号付けられるとき,X の確率分布は
PX (xi ) := Pr{X = xi }
(3-8)
であり,任意の区間 I に対し
Pr{X ∈ I} =
∑
PX (xi )
(3-9)
i∈I
となる.
2. 連続の場合
任意の一次元区間 I = (a, b] に対して
∫
Pr{a ≤ X ≤ b} =
b
fX (t)dt ≤ 1
(3-10)
a
となる関数 f (t) を連続的な確率変数 X の確率密度関数という.このとき,分布関
数は
∫
FX (x) = Pr{−∞ < X ≤ x} =
で与えられる.
x
−∞
fX (t)dt
(3-11)
第 3 章 確率
21
3. 多変数の場合
N 個の連続確率変数 X1 , X2 , · · · , XN と対応する一次元区間 I1 , I2 , · · · , IN に対
して
Pr{X
1∫∈ I1 , X2 ∫∈ I2 , · · · , XN ∈ IN }
∫
fX1 ,X2 ,··· ,XN (t1 , t2 , · · · , tN )dt1 dt2 · · · dtN (3-12)
=
···
t1 ∈I1
t2 ∈I2
tN ∈IN
となる関数を変数 X1 , X2 , · · · , XN の同時確率密度関数といい,同時確率分布関
数は
F
,XN (x
∫ Xx11,X∫2 ,···
∫ 1x,Nx2 , · · · , xN )
x2
=
···
fX1 ,X2 ,··· ,XN (t1 , t2 , · · · , tN )dt1 dt2 · · · dtN
−∞
−∞
(3-13)
−∞
で与えられる.
確率変数の独立性
定義 6. 離散確率変数 X, Y において,すべての i, j に対して
PX,Y (xi , yj ) = PX (xi )PY (yj )
(3-14)
が成り立つとき X と Y は独立であるといい,連続な場合にはすべての x, y に対して
pX,Y (x, y) = pX (x)pY (y)
(3-15)
が成り立つことをいう.
条件付分布
定義 7. 離散確率変数 X, Y に対して,PY (y) ̸= 0 のとき
PX|Y (x|y) := Pr{X = x|Y = y} =
PX,Y (x, y)
PY (y)
(3-16)
を Y = y が生じる条件のもとでの X の条件付分布という.連続確率変数の場合は,
区間 Pr{Y ∈ (y, y + dy]} =
̸ 0 のとき、条件付確率は,密度関数を用いて
Pr{X ∈ (x, x + dx]|Y ∈ (y, y + dy]} =
fX,Y (x, y)dxdy
fX,Y (x, y)dx
=
(3-17)
fY (y)dy
fY (y)
で計算される.
第 3 章 確率
22
期待値と分散
定義 8. 離散確率変数 X の確率分布 {PX (Xi )} が与えられた時,期待値と分散はそ
れぞれ
E{X} :=
∞
∑
xi PX (xi )
(3-18)
i=1
∞
∑
V {X} := E{(X − E{X})} =
(xi − E{X})2 PX (xi )
(3-19)
i=1
で与えられる.
連続の場合は
∫
∞
E{X} :=
−∞
xfX (x)dx
{
}
V {X} := E (X − E{X})2 =
(3-20)
∫
∞
−∞
(x − E{X})2 fX (x)dx
(3-21)
となる.
23
第4章
加法性白色ガウス雑音通信路での最
適受信
デジタル通信では整数の情報を正弦波の振幅,周波数もしくは位相に載せて伝送する
が,その際に雑音,減衰,歪み,フェージング,干渉などの影響を受けて通信誤りを引き
起こす.その中で雑音はすべての通信路において存在し,多くの場合通信誤りを引き起こ
す主な原因となっている.
4.1 加法性雑音通信路モデル
デジタル通信システムにおいて,送信する情報は二進数のビット(情報列)として考
えられる.一般的にこれらのビット列は Q ビットずつ区切られ,一度に Q ビットを送
るこどで送信速度の向上を図る.そのために,送信機は M = 2Q 個の転送に適した波形
sm (t), m = 0, 1, · · · , M − 1 用意して,Q ビットのビット列に応じて,対応する波形を送
信する.
babababababababababababababababab
8 ビットの情報列 b = (00011011) を Q = 2 ビットずつ送信するシステムを
考える.情報列を 2 ビットずつ区切って十進数で表すと,送信するデータ列は
d = (0, 1, 2, 3) となる.電気信号でデータ列を送信するために,送信機は
s0 (t) = 0 cos(ωt)
s1 (t) = 13 cos(ωt)
(4-1)
s2 (t) = 23 cos(ωt)
s3 (t) = 1 cos(ωt)
の四つの波形用意し,d 応じて s0 (t), s1 (t), s2 (t), s3 (t) を順番に送信する.
第 4 章 加法性白色ガウス雑音通信路での最適受信
24
4.1.1 波形モデル
受信機のアンプなどでの熱雑音は,信号に加算される形式で加わる.次の図 4-1 は,上
の例での送信波形,雑音および受信波形を表す.
2
1
1
0.5
0
0
-0.5
-1
-1
0
0.5
1
1.5
2
2.5
3
3.5
変調
-2
0
4
0.5
1
1.5
2
2.5
3
3.5
4
復調
+
0.4
0.2
0
-0.2
-0.4
0
0.5
1
図 4-1
1.5
2
2.5
3
3.5
4
雑音の影響を受けた受信波形の例
−1
M := {m}M
m=0 とした場合,m ∈ M の変調信号 sm (t) を加法性雑音通信路に通すと
受信信号は
r(t) = sm (t) + n(t)
(4-2)
となるので,加法性雑音通信路の波形モデルは図.4-2 のようになる.
sm (t)
+
r(t)
n(t)
図 4-2 加法性雑音の波形モデル
4.1.2 ベクトルモデル
加法性雑音の波形表現は,送受信機での信号を直感的に表しているが,連続した時間パ
ラメータ t が含まれているので,取り扱うの際には不便である.それで,波形表現より連
第 4 章 加法性白色ガウス雑音通信路での最適受信
25
−1
続した時間パラメータを省略するべく,有限 (N ) 次元直交基底 {αn (t)}N
n=0 を用いて信
号 sm (t) を表す方法を考える.このとき,基底 αn (t),0 ≤ n < N ,での信号 sm (t) の係
数は
∫
∞
sm,n =
sm (t)αn (t)dt
(4-3)
0
で与えられる.
−1
逆に各基底での係数を表す長さ N の係数ベクトル sm = (sm,n )N
n=0 が与えられたと
き,ベクトル sm は一意的に信号
sm (t) =
N
−1
∑
sm,n αn (t)
(4-4)
n=0
−1
に対応できるが,この時に用いられた基底 {αn (t)}N
n=0 が完備であれば,式 (4-3) と式
(4-4) での信号 sm (t) は同じになる.
雑音に関しても式 (4-3 にで sm (t) を n(t) で置き換えることで,長さ N の実数ベクト
ル n を求め,加法性雑音通信路はベクトルの加算
r = sm + n
(4-5)
で表現できる*1 .加法性雑音通信路のベクトルモデルは図.4-3 で示している.
+
sm
r
n
図 4-3
加法性雑音のベクトルモデル
4.1.3 確率モデル
m ∈ M が送信される確率を Pm とすると,sm は変調方式によって決まる m の確定的
な関数なので,送信機は同じ確率 Pm で sm を送信することになる.また,(4-5) より sm
が送信された場合の受信信号は雑音の確率変数 n に依存する故に,受信信号 r も確率変
数となり,送信機が sm を送信した場合,受信機が r ∈ RN を受信する同時確率密度はベ
イズの公式より
p(r, sm ) = p(r|sm )Pm
(4-6)
で表されるので,通信路の確率モデルは図.4-4-b) のように示すことができる.
*1
−1
一般的にここで用いた直交基底 {αn (t)}N
n=0 は n(t) に対しては完備ではないので,複数の n(t) が一つ
の n に対応することになるが,これらは判定の最適性に影響しない.
第 4 章 加法性白色ガウス雑音通信路での最適受信
26
p(r|sm )
sm
r
図 4-4 通信路の確率モデル
図.4-4 で,b) のベクトルモデルと比べて,c) の確率モデルでは入出力間の確率密度関
数を用いて雑音の影響を表している.雑音がない時,p(r|sm ) は r = sm の場合のみ確率
が 1 となるので,雑音がない通信路の確率モデルは
{
p(r|sm ) =
1; r = sm
0; otherwise
となる.
加法性雑音通信路においていは,式 (4-5) より r−sm = n となる故に,p((r−sm )|sm ) =
p(n) となり,p(n) から通信路の確率密度関数を求めることができる.通信路の確率モデ
ルは,雑音と送信信号の具体的な算術演算の指定がないので,加法性雑音通信路のみなら
ず,すべての通信路を確率モデルで表現することができる.
4.2 最適な MAP 受信機
受信側では観測された r(t) より送信されたデータを判定するが,その際に送信された
データ m と判定したデータ m̂ の誤り
Pe = Pr {m ̸= m̂}
(4-7)
が最小となる判定ルールを最適判定とする.
一般性を失わないために,すべての m ∈ M は受信信号 r を生成する可能性があると
仮定し,r ∈ RN に対して p(r|sm ) ≥ 0, m ∈ M が成り立つとする.受信機は受信信号 r
に基づいて送信されたデータを判定するので,RN から M の関数 g(·) を用いて判定ルー
ルを m̂ = g(r) と記述する.受信信号 r に基づいて判定したデータ m̂ と送信されたデー
タ m が一致する場合正しい判定となるので,送信データを確率変数と見なすと,受信信
号 r が正しく判定される確率は
Pr{m = m̂|r} = Pr{m = g(r)|r}
となり,受信信号が正しく判定される確率は
∫
1 − Pe =
∫
Pr{m = m̂|r}p(r)dr =
RN
Pr{m = g(r)|r}p(r)dr
(4-8)
RN
で表される.
p(r) は常に非負の値を取るので,Pr{m = g(r)|r} がすべて最大となる時,式 (4-8) が
最大値を取る.その故に,各受信信号 r に対して確率 Pr{m = m̂|r} が最大となる m̂ を
第 4 章 加法性白色ガウス雑音通信路での最適受信
27
出力する関数 g(·) が最適判定ルールとなり
= arg max P (sm |r)
m∈M
p(r|sm )
p(r)
m∈M
= arg max Pm p(r|sm )
= arg max Pm
(4-9)
m∈M
で表せる.
式 (4-9) で示した判定ルールは事後確率を最大化するルールなので,このような受信機
は maximum a posteriori probability (MAP) 受信機と呼ばれる.特に Pm =
1
M
の場
合,式 (4-9) は
m̂ = arg max p(r|sm )
(4-10)
m∈M
で簡略化でき,maximum-likelihood (ML) 受信機と呼ばれるが,各データが送信される
確率が同じでない場合,ML 受信機は最適判定にならない.
受信機は信号空間 RN を M 個の領域 Dm , m ∈ M, に分割し,受信された信号が Dm
に属す場合,言い換えればイベント r ∈ Dm が発生した場合に m が送信されたと判定す
るので,Dm はデータ m の判定領域と呼ばれる.
判定領域の視点より,式 (4-7) は
Pe =
∑
Pm Pr{r ∈
/ Dm |sm }
∑
∑
m∈M
=
Pm
=
∑
Pr{r ∈ Dm′ |sm }
m′ ∈M,m′ ̸=m ∫
m∈M
∑
Pm
m′ ∈M,m′ ̸=m
m∈M
p(r|sm )dr
(4-11)
D′
と書き直せる.
4.3 加法性白色ガウス雑音 (AWGN) 通信路での受信
一次元ガウス雑音の確率密度関数は,期待値 µ ∈ R と分散 σ > 0 を用いて
f (x) = √
(x−µ)2
1
e− 2σ2
2πσ
(4-12)
で与えられ,便宜のためしばしば N (µ, σ 2 ) で表されるが,特に期待値と分散が,µ = 0
と σ = 1 になる正規分布は標準正規分布と呼ばれる.
ガウス確率変数の累積分布関数は,変数変換 u = (t − µ)/σ を用いて
∫
x
(t−µ)2
1
e− 2σ2 dt
−∞∫ 2πσ
∞
(t−µ)2
1
√
=1−
e− 2σ2 dt
2πσ
x
F (x) =
√
第 4 章 加法性白色ガウス雑音通信路での最適受信
∫
28
∞
u2
1
√ e− 2 du
x−µ
2π)
σ
(
x−µ
=1−Q
σ
=1−
と表されるが,ここで
1
Q(x) = Pr {N (0, 1) > x} = √
2π
∫
∞
t2
e− 2 dt
(4-13)
x
は Q 関数と呼ばれ,次の性質がある.
• Q(0) =
1
2
• Q(∞) = 0
• Q(−∞) = 1
• Q(−x) = 1 − Q(x)
一般的なガウス確率変数 X ∼ N (µ, σ 2 ) に対しては
Pr {X > α}
Pr {X < α}
(
)
= Q ( α−µ
σ )
= Q µ−α
σ
(4-14)
となる.図 4-5 はガウス確率変数の確率密度関数および累積分布関数を示している.
F (x)
p(x)
√
1
2πσ
1
1
2
µ
µ
x
(a)
図 4-5
x
(b)
ガウス確率変数の確率密度関数および累積分布関数
n(t) を複素数の値を取る平均値が 0 でスペクトル密度が N0 /2 である白色ガウス雑音
(AWGN)N (0, N0 /2) と仮定すると,実部と虚部が独立である場合,確率密度関数は
|x|2
1
fn (x) = √
e− N 0
πN0
(4-15)
となる.
−1
ガウス確率過程において,基底 {αn (t)}N
n=0 を適切に選択することで,各基底での係数
nn が独立かつ同一分布 (i.i.d.) に従うようにすることができる.その故に,n は平均値が
0 で分散が N0 /2 の i.i.d. 確率変数と仮定することができ,確率密度関数は
(
p(n) =
1
√
πN0
)N
e−
∥n∥2
N0
(4-16)
第 4 章 加法性白色ガウス雑音通信路での最適受信
29
で与えられ,式 (4-9) の最適判定は
m̂ = arg max Pm p(r|sm )
m∈M
= arg max Pm pn (r − sm )
m∈M
(
)N
∥r −sm ∥2
1
= arg max Pm √
e− N 0
πN0
m∈M
∥r −sm ∥2
= arg max Pm e− N0
m∈M {
}
∥r − sm ∥2
= arg max ln Pm −
N0
m∈M
{
}
1
N0
2
2
T
= arg max
ln Pm − (∥r∥ + ∥sm ∥ ) + rsm
2
m∈M { 2
}
1
N0
2
T
= arg max
ln Pm − ∥sm ∥ + rsm
2
2
m∈M
となり,Pm =
1
M
(4-17)
(4-18)
の場合,ML 判定は
{
}
m̂ = arg max −∥r − sm ∥2
m∈M
= arg min {∥r − sm ∥}
(4-19)
m∈M
と簡略化できる.
式 (4-19) は ML 判定ルールでは,信号平面において受信信号 r から最も近い距離にあ
る信号点を送信信号とするので,信号点が図.4-6 のように配置されている場合,s0 と s1
の判定境界は二つの信号点を結んだ直線を垂直に二分する直線になる.
s0
s3
D0
D1
D3
D2
s1
s2
図 4-6
判定領域
30
第5章
信号のスペクトル
電気信号を表現する最も一般的な方法は,図 5-1 で示しているように,時間 t を横軸に
取り,各時刻での電圧/電流の強度を縦軸に表す方法であるが,このような表現法を信号
の時間領域表現と呼ぶ.
x
x(t)
t
図 5-1 信号の時間領域表現
ここで,縦軸を実数軸とすると電圧/電流の強度は実数 (R で表記) の値をとるので,電
圧/電流の時間的変化はすべて時間領域表現を用いて直感的に表すことができる.
一方,コイルやコンデンサーなどの電子素子は入力される信号の周波数によって異なる
振幅/周波数応答を示す.ところが,時間領域表現からは信号に含まれている周波数成分
を考察するのが困難であるため,電気信号の解析では横軸を周波数とし,縦軸に対応する
周波数成分の強度を表す周波数領域表現がよく使われている.
時間領域表現と周波数領域表現で用いられる時間もしくは周波数の集合を基底と呼ぶ.
一般的に,ある集合が基底を成す条件として
1. 独立(直行)性:基底の任意の成分は,他の成分の組合わせで表現することができ
ない.
2. 完備性:すべての信号は,基底の組み合で表現できる.
第 5 章 信号のスペクトル
31
がある.完備な基底として,三角関数集,複素指数集,Legendre 多項式,Rademaher 関
数集,Walsh 関数などが挙げられるが,電気部品(電線や無線を含む広い意味)の振幅/
周波数応答が周波数に依存するので,電子工学では三角関数集と複素指数集が特に広く応
用されている.
5.1 二次元平面での基底
⃗ ,⃗y に対して,ベクトル v の x
⃗ と
図 5-2 の二次元平面上にある直行無限長ベクトル x
⃗ 軸の成分をそれぞれ 3 と 2 であると仮定する.
x
!y
v
2
ey
ex
図 5-2
3
!
x
ベクトルの基底
基底を用いて v を表すため,基底
{
⃗ 軸上で長さ 2 のベクトル
ex : x
ey : ⃗y 軸上で長さ 1 のベクトル
(5-1)
を用いると,図 5-2 で示したベクトルは
v = 1.5ex + 2ey
⃗ 軸上の係
で表すことができる.この場合,用いた ex が長さ 2 のベクトルであるため,x
⃗ 軸上での成分を求めるには ex の長さで乗算を行う必要がある.
数 1.5 から x
⃗ 軸上での基底も長さ 1 のベクトルに修正し,基底
それで,x
{
⃗ 軸上で長さ 1 のベクトル
ex : x
ey : ⃗y 軸上で長さ 1 のベクトル
(5-2)
を用いるとベクトル v
v = 3ex + 2ey
で表され,係数から各軸上の成分を直接読み取れる.
二次元平面上のベクトル v ,u に対して,|v|,|u| でそれぞれの長さ,θ で二つのベク
トルで挟まれた角度を表し,ベクトル積
v · u = |v||u| cos θ
を定義すると,(5-2) での |ex | と |ey | は次の性質がある.
第 5 章 信号のスペクトル
32
1. ex · ey = 0.
2. ex · ex = ey · ey = 1.
5.2 三角関数基底
2π
T (T
直流と角周波数が ω0 = 2πf =
は周期) となる正弦波と余弦波の倍数波集合
{1, cos nω0 t, sin nω0 t}n∈Z+
(5-3)
を考える.この集合から基底を作るため,次の集合を考える.
{∫
∫
T
2
∫
T
2
1dt,
− T2
cos nω0 t,
− T2
}
T
2
− T2
sin nω0 t
(5-4)
n∈Z+
異なる倍数波の正弦波と余弦波に対して,三角関数の積和公式を使うと,一つの周期区
間での積分に関する次の式が容易に得られる.
∫
∫
∫
∫
∫
T
2
− T2
T
2
− T2
cos mω0 tdt =
T
2
− T2
sin mω0 tdt = 0; m ∈ Z+
∫
cos mω0 t sin nω0 tdt =
− T2
∫
T
2
− T2
T
2
cos mω0 t cos nω0 tdt =
{
T
2
− T2
T
2
cos mω0 t sin nω0 tdt = 0; m, n ∈ Z+
sin mω0 t sin nω0 tdt =
T
2
; m=n
0; m =
̸ n
1dt = T
− T2
つまり,一つの周期区間*1 [−T /2 T /2] において (5-4) での集合は次の性質を満たす.
1. 異なる周波数の正弦波/余弦波の積は 0 である.
2. 正弦波と余弦波の積は 0 である.
3. 同じ周波数の正弦波/余弦波の積は周期の半分である.
4. 直流成分同士の積は周期 T となる.
このような性質から,(5-4) の集合は二次元平面での (5-1) の基底と等価であるが,1. と
2. の性質は三角関数の直行性と呼ばれる.3. と 4. の性質は選んだ成分が単位エネルギー
ではないことを意味するので,(5-5) の集合にある各成分をそれぞれのエネルギーで割り,
二次元平面での (5-2) と等価の基底
{
1
T
∫
T
2
− T2
2
1dt,
T
∫
T
2
− T2
2
cos nω0 t,
T
∫
}
T
2
− T2
sin nω0 t
(5-5)
n∈Z+
を三角関数基底とする.
*1
任意の a ∈ R に対して,区間 [a a + T ] での積分を行っても結果は同じである.
第 5 章 信号のスペクトル
33
二次元平面での各軸上成分の表し方同様,(5-5) の三角関数基底を用いると,エネルギー
有限の信号 x(t) が次のように与えられた時
x(t) = a0 + a1 cos ω0 t + b1 sin ω0 t + a2 cos 2ω0 t + b2 cos 2ω0 t + · · ·
· · · + an cos nω0 t + bn sin nω0 t + · · ·
∞
∑
= a0 +
[an cos nω0 t + bn sin nω0 t]
(5-6)
n=1
直流成分および倍数波成分は
• 直流成分
∫
1
a0 = x(t) ·
T
T
2
− T2
1
dt =
T
∫
T
2
x(t)dt
(5-7)
− T2
• 余弦波振幅
an = x(t) ·
2
T
∫
T
2
− T2
cos nω0 tdt =
2
T
∫
T
2
− T2
x(t) cos nω0 tdt; n ∈ Z+
(5-8)
x(t) sin nω0 tdt; n ∈ Z+
(5-9)
• 正弦波振幅
2
bn = x(t) ·
T
∫
T
2
− T2
2
sin nω0 tdt =
T
∫
T
2
− T2
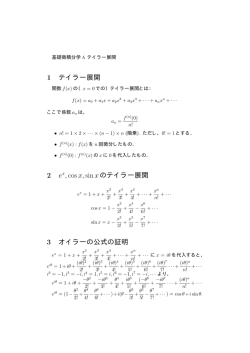
5.2.1 n 倍数波の統合
cn
bn
φn
an
図 5-3
三角関係
式(5-6)において同じ n 倍数波の正弦波と余弦波の係数に対し
cn =
√
a2n + b2n
とおくと,an , bn , cn の間には,図 5-3 に示しているような三角関係から
an
bn
tan ϕn
= cn cos ϕn
= −cn sin ϕn
=
− abnn
第 5 章 信号のスペクトル
34
が成り立ち,n 倍数波部分は
an cos nω0 t + bn sin nω0 t
= cn cos ϕn cos nω0 t − cn sin ϕn sin nω0 t
= cn cos(nω0 t + ϕn )
(5-10)
と書き換えられる.つまり,an cos nω0 t と bn sin nω0 t の二つの項は,波形の起点をずら
す (位相を回転させる) と完全に一致する基底上の成分であり,物理的に
an cos nω0 t + bn sin nω0 t
は振幅と位相が
{
cn
ϕn
=
=
√
a2n + b2n
− tan−1 abnn
で与えられる一つの n 倍数波を表す.
(5-10) を(5-6)に代入すると,信号は
x(t) = a0 +
∞
∑
(5-11)
cn cos(nω0 t + ϕn )
n=1
で シ ン プ ル に 表 現 す る こ と が で き る が ,ϕn は an と bn に 依 存 す る た め ,x(t) と
2
T
∫
T
2
− T2
cos(nω0 t + ϕn ) の積から振幅 cn を取り出すことができない.
5.3 複素指数基底とフーリエ変換
信号解析では,概念理解や計算の簡素化の道具として複素数表現を用いる.
複素数
定義 9. 複素数 z = x + jy, x, y ∈ R, j =
√
−1 に対して,次の記号を定める.
• 複素共役:z ∗ = x − jy
√
√
• 絶対値: |z| = |z ∗ | = zz ∗ = x2 + y 2
• 位相角:arg(z) = tan−1
y
x
• 実部:ℜ(z) = x
• 虚部:ℑ(z) = y
複素数と三角関数の間の関係は
オイラーの公式
で与えられる.
e−jω = cos ω − j sin ω
(5-12)
第 5 章 信号のスペクトル
ここで,j =
35
√
−1 で定義されている虚部は,複素平面上に実部と垂直の軸に書くこと
が多いが,実部と独立との意味ではなく,物理的には実部と位相が 90◦ ずれているとの意
味合いが強い.それで,式(5-12)を「周波数 ω の余弦波と同じ周波数で位相が 90◦ 遅れ
ている正弦波の組」で解釈すると,次の複素指数基底の係数に対して物理的意味を付与す
ることができる.
直流および複素 n 倍数波から導かれる単位エネルギーの直行基底
{
1
T
∫
T
2
}
ejnω0 t
− T2
(5-13)
n∈{0}∪Z+
を複素指数基底と呼ぶ.
三角関数基底と複素指数基底での係数関係を導くため,
(5-6)で与えられた信号 x(t) に
対して,複素指数基底係数をフーリエ変換を用いて求めると
1
yn = x(t) ·
T
∫
T
2
e
−jnω0 t
− T2
1
dt =
T
∫
T
2
x(t)e−jnω0 t dt
(5-14)
− T2
係数は
y0 = a0
∫ T2
1
x(t)e−jnω0 t dt
yn =
T − T2
∫ T2
1
=
x(t) [cos nω0 t − j sin nω0 t] dt
T − T2
1
= (an − jbn )
2
cn
= ejϕn
2
(5-15)
となり,振幅 cn = 2|yn | と位相 ϕn = arg(yn ) が容易に読み取れる.また,複素指数基底
に基づいた信号の表現式は
x(t) =
∞
∑
yn ejnω0 t
(5-16)
−∞
と書くことができ,フーリエ級数展開と呼ぶ.
(5-11) と (5-15) で周期 T の信号 x(t) の振幅 cn と位相 ϕn はすべて nω0 ,−∞ ≤ n ≤
∞,の関数である. それで,図.5-4 ように,横軸に ω0 の整数倍をならべ,縦軸に |yn |
を示す図を信号の振幅スペクトルと呼ぶが,信号 x(t) が実数の場合,振幅スペクトルは
左右対称となる.
同じく,図.5-5 のように,横軸に ω0 の整数倍をならべ,縦軸に位相 ϕn の値を示す図
は信号の位相スペクトルと呼ぶ.
第 5 章 信号のスペクトル
36
|yn |
···
−ω0 0
−3ω0
図 5-4
3ω0 · · ·
ω0
ω
複素指数基底での振幅スペクトル
arg(yn )
−3ω0
3ω0
· · · −5ω0
図 5-5
5ω0 · · · ω
0
複素指数基底での位相スペクトル
5.4 三角関数基底と複素指数基底の比較
実際の電流は虚数になることがないので,(5-16) の複素指数基底よるフーリエ級数は,
(5-6) で示した三角関数基底に基づいた表現と物理的には同等である.
ここで,三角関数基底に基づいたフーリエ級数の表現において,実数の値を取る各係
数は
• a0 :直流成分の振幅
• an :第 n 次高調余弦波成分
• bn :第 n 次高調正弦波成分
となり,値は振幅,符号は位相反転の物理的な意味を持つ.
また,同じ次数の余弦波と正弦波をまとめて式 (5-11) の形式て表現した場合,
• cn :第 n 次高調波成分
• ϕn :第 n 次高調波成分の位相
第 5 章 信号のスペクトル
37
を表す.cn も実数の値を取り,その絶対値は合成後の振幅に対応し,cn が
cn cos(nω0 t + ϕn )
第 n 次高調波成分が存在することを示すなら,−cn は −cn cos(nω0 t + ϕn ),つまり位相
が反転された成分
cn cos(nω0 t + ϕn + π)
の存在を意味する.したがって,位相成分 ϕn は [0 π) の範囲で値を取れば,cn と組合わ
せて波形を一意的に指定する.
一方,同じ実数*2 信号波形 x(t) に対して,複素指数基底での係数と三角関数基底での係
数は
y0
y−n
yn
= a0
= 21 (an + jbn )
= 12 (an − jbn )
(5-17)
を満たすので,複素指数基底においても直流成分は三角関数基底と同じ物理的な意味を持
つ.また,上の関係式より,yn を複素平面で示した場合,各成分の配置は次の図 5-6 のよ
うになる.
y−n
ℜ
ℑ
an /2
bn /2
an /2
−nω0
0
nω0
ω
yn
−bn /2
図 5-6
複素指数基底でのスペクトル
一方,三角関数基底での係数を複素指数基底で表すと次の通りとなる.
an
bn
c
n
ϕn
*2
= y−n + yn = 2ℜ(y−n ) = 2ℜ(yn )
= y−n − yn = 2ℑ(y−n ) = −2ℑ(yn )
√
= 2|y−n | = 2|yn | = 2 y−n yn
= arg(yn ) = − arg(yn )
同様な議論を複素信号に拡張できるが,ここでは実信号に限る.
(5-18)
第 5 章 信号のスペクトル
38
babababababababababababababababab
信号
x(t) = 1 + 3 cos ω0 t + 4 sin ω0 t + 5 cos 3ω0 t − 12 sin 3ω0 t
は直流成分が 1,の振幅がそれぞれ 3 と 4 となる一次 (n = 1) 余弦波と正弦波,
振幅がそれぞれ 5 と 12 の三次 (n = 3) 余弦波と正弦波を含む信号である.その
故に三角関数の基底においての係数は
1
3
an =
5
0
4
−12
bn =
0
;
;
;
;
;
;
;
n=0
n=1
n=3
otherwise
n=1
n=3
otherwise
となる.
一方,複素数基底での係数は (5-17) より
yn =
1
2 (5
1
2 (3
1
1
2 (3
1
2 (5
jϕ3
− j12) = 13
2 e
5 jϕ1
+ j4) = 2 e
− j4) = 25 e−jϕ1
+ j12) = 25 ejϕ3
0
となるが,ここで ϕ1 = tan−1
4
3
;
;
;
;
;
;
n = −3
n = −1
n=0
n=1
n=3
otherwise
≈ 0.93,ϕ3 = tan−1 − 12
5 ≈ −1.18,である.
信号 x(t) の振幅と位相スペクトルは次の図.5-7,5-8 のようになる.
第 5 章 信号のスペクトル
39
|yn |
13
2
5
2
1
ω
−ω0 0
−3ω0
図 5-7
3ω0
ω0
x(t) の振幅スペクトル
arg(yn )
π
2
0.93
−3ω0
ω
ω0
0
−ω0
3ω0
-1.18
−
図 5-8
π
2
x(t) の位相スペクトル
5.5 周期方形波のスペクトル
図.5-9 で示すパルスの幅と高さがそれぞれ τ と 1/τ で,周期が T の周期方形波信号
{
x(t) =
1
τ;
0;
x(t + nT ) = x(t)
|t| ≤
|t| >
τ
2
τ
2
(5-19)
に対して,(5-14) を用いて複素指数関数基底での係数を求めると
y0 =
1
T
∫
T
2
x(t)dt =
− T2
1
Tτ
∫
τ
2
dt =
− τ2
1
T
∫ T2
∫ τ2
1
1
−jnω0 t
x(t)e
dt =
e−jnω0 t dt
yn = y−n =
T − T2
T τ − τ2
[
]τ
1
sin nω0 t
cos nω0 t 2
=
+j
Tτ
nω0
nω0
−τ
2
(5-20)
第 5 章 信号のスペクトル
40
1
τ
−T
−
図 5-9
(
1
=
T
sin nπτ
T
T
t
周期方形波信号の波形
)
=
nπτ
T
0 τ
2
τ
2
( nπτ )
1
sinc
T
T
(5-21)
となり,周期方形波信号は
x(t) =
=
∞
∑
yn ejnω0 t
n=−∞
∞
∑
1
T
sinc
( nπτ )
n=−∞
で表すことができる.ここで,sinc(x) :=
sin x
x
T
ejnω0 t
(5-22)
を図.5-10 で表しているが,sinc(x) は
x = 0 で 1 となり,x = nπ, n = ±1, ±2, · · · では 0 となる*3 関数である.
1
0.8
0.6
0.4
0.2
0
−0.2
−4pi
−3pi
−2pi
−pi
0
pi
2pi
図 5-10 sinc(x) 関数
*3
lim
x→0
sin x
sin′ x
= lim
= cos 0 = 1
x→0 x′
x
3pi
4pi
第 5 章 信号のスペクトル
41
T = Kτ とすると,式 (5-21) で表される周期方形波のスペクトル*4 は図.5-11 となり,
以下の性質がある.
1
0.8
0.6
0.4
0.2
0
−0.2
−4pi
−3pi
−2pi
図 5-11
−pi
0
pi
2pi
3pi
4pi
周期方形波のスペクトル
• スペクトルの間隔は ω0 (= 2π/T ) となり,周期が長くなると間隔が狭くなる.
• 各周波数成分の絶対値は,周期に反比例する.
( )
• スペクトルの包絡線は sinc nπ
K に従って変化する.
• (nπ (n + 1)π], n = ±1, ±2, · · · の中には,K 本のスペクトルを持つが,ω =
2nπ
τ
で
のスペクトルは 0 となる.
5π
3π
5π
• ω ≈ 0, 3π
τ , τ , · · · の時,スペクトルは極値を持つ (sinc( 2 ) ≈ −0.217, sinc( 2 ) ≈
0.128, · · · ).
• 周期方形波信号は無限の周波数成分を持つが,主なエネルギーは第一零点内に集中
している.故に,方形波信号のバンド幅を Bω =
がある.(sinc( π2 )
*4
2π
τ
もしくは Bf =
= 0.637)
すべてのスペクトル係数の虚部が0であるため,実部の係数を用いて表す.
1
τ
とする場合
第 5 章 信号のスペクトル
42
−
T
4
1
T
T
4
T
−T
−
図 5-12
t
1
T
クロック信号の波形
babababababababababababababababab
デジタル回路では同期の参照信号として図.5-12 で示したクロック信号が用い
られている.波形の特徴からクロック信号は図.5-9 の周期矩形波信号の直流成
分を除去し,τ =
T
2
にすることで得られる.
そのために,クロック信号のスペクトルは y0 = 0 とし,τ =
T
2
を式 (5-21) に
代入するすればいいので,第 n 次余弦波の成分は
( nπ )
2
sinc
T
2 )
( nπ
2
= sinc
T [
2 ( )]
4 1
nπ
=
sin
Tπ n
2
an =
(5-23)
となり
[
]
1
1
4
x(t) =
cos ω0 t − cos (3ω0 t) + cos (5ω0 t) + · · ·
Tπ
3
5
(5-24)
でクロック信号表すことができる.
図.5-13 で示したように,クロック波形のスペクトルでの偶数高調波のスペクト
ルは包絡線の零点と一致するため,奇数高調波のみが存在し,振幅は
する.
1
n
で収束
第 5 章 信号のスペクトル
43
1
0.8
0.6
0.4
0.2
0
−0.2
−4pi
−3pi
−2pi
−pi
図 5-13
0
pi
2pi
3pi
4pi
クロック信号の an
5.6 非周期方形波信号のフーリエ変換
周期方形波信号で T = ∞ にした場合として,非周期方形波信号を考える.
周期信号において第 n 次高調波成分は
yn =
1
T
∫
T
2
x(t)e−jnω0 t dt
(5-25)
− T2
と定義されているので,T → ∞ の場合は 0 となる.言い換えれば,スペクトル間隔が
ω0 =
2π
T
で与えられるので,T → ∞ の場合は ω0 → 0 となる.
そのために,
T yn =
2πyn
=
ω0
∫
T
2
x(t)e−jnω0 t dt
(5-26)
− T2
から
2πyn
F (ω) := lim
= lim T yn =
ω0 →0 ω0
T →∞
∫
∞
x(t)e−jωt dt
(5-27)
−∞
を導入し,スペクトル密度と呼ぶことにし,フーリエ級数を次の積分形式に書き換える.
1
x(t) =
2π
∫
∞
F (ω)ejωt dω
(5-28)
−∞
ここで,(5-27) と (5-28) は,それぞれフーリエ変換及び逆フーリエ変換と呼ばれる.
第 5 章 信号のスペクトル
44
この定義に基づいて非周期方形波の周波数成分を求めると,
∫
∫ τ
1 2 −jωt
F (ω) =
x(t)e
dt =
e
dt
τ − τ2
−∞
[
]τ
1 sin ωt
cos ωt 2
=
+j
τ
ω
ω
− τ2
( ωτ )
= sinc
2
∞
−jωt
(5-29)
となり,ω = ± n2π
τ , n = 1, 2, · · · の時に 0 となる.
5.7 信号の周期性と離散特性
1. 連続時間信号
記述の便宜上,(5-27) と (5-28) に対して,ω = 2πf を代入すると,任意の連続時
間信号のフーリエ変換対は
X(f ) =
x(t)
∫
∞
x(t)e−j2πf t dt
∫−∞
∞
(5-30)
X(f )ej2πf t df
=
−∞
と書ける.
x(t) が非周期信号なら,そのスペクトルは, 図.5-14-a) で示しているような周波数
上連続の信号となり,逆に X(f ) が非周期信号なら,逆変換で得られる信号 x(t) も
時間軸上連続の信号となる.
2. 時間軸上周期的な信号
信号 x(t) が時間軸上で周期 T を持つ場合,式 (5-16)(5-14) に対して,ω0 = 2πf0
とし,比較の便宜上 yn を X(nf0 ) で書き直すと,フーリエ変換対は
X(kf0 )
x(t)
=
1
T
=
∫
T
2
− T2
∞
∑
x(t)e−j2πnf0 t dt
(5-31)
X(nf0 )e
j2πnf0 t
n=−∞
となる.ただし,f0 =
1
T
である.図.5-14-b) で示しているように,時間軸上周期
的な信号のは,離散スペクトルを持つ.
3. 時間軸上離散的な信号
非周期信号 x(t) に対して,間隔 Ts で行ったサンプリングを用いて時間軸上離散的
な信号標本 x(nTs ) を生成した場合,そのスペクトルは図.5-14-c) のように周期性
を持つので,(5-31) と同様に,
X(f )
=
x(nTs ) =
∞
∑
x(nTs )e−j2πnf Ts
n=−∞
∫
Ts
0
1
Ts
(5-32)
X(f )e
j2πnf Ts
df
第 5 章 信号のスペクトル
45
でフーリエ変換対を定義できるが,時間間隔 Ts と周波数上の周期 fs の間には逆数
関係
fs =
1
Ts
(5-33)
が成り立つ.
4. 時間軸上周期的な離散信号
上の二つの事実より,時間軸上周期的な離散信号 x(nTs ) のスペクトルが周期的な
離散信号となることが容易に導けるが,この場合
N=
T
fs
=
Ts
f0
(5-34)
となるので,時間/周波数共に一つの周期を用いてフーリエ変換対を
X(kf0 ) =
x(nTs )
で定義できる.
=
N
−1
∑
x(nTs )e−j
n=0
N
−1
∑
1
N
k=0
2πkn
N
(5-35)
X(kf0 )e
j 2πkn
N
第 5 章 信号のスペクトル
46
X(f )
x(t)
1
τ
Sa (πf τ )
−
τ
2
0
τ
2
t
···
a)
−
2
1
0
−
τ
τ
1
τ
2
τ
連続時間と連続周波数信号
f0 =
−
τ
2
0
t
f
T
b)
連続時間と離散周波数信号
c)
離散時間と連続周波数信号
Ts
0
t
fs =
f0 =
−
1
Ts
x(nTs )
Ts
1
τ
τ
2
0
τ
2
1
T
0
τ
2
x(nTs )
−T
f
x(t)
1
τ
−T
···
1
T
t
T
d)
離散時間と離散周波数信号
図 5-14 周期性と離散特性
fs =
1
Ts
47
第6章
標本化定理
6.1 インパルス信号
方形波信号
{
x(t) =
1
τ;
0;
|x| ≤
|x| >
τ
2
τ
2
(6-1)
に対して,正の値をとる期間が 0 に無限に近づく信号
δ(t) = lim x(t)
τ →0
(6-2)
をインパルス信号と呼ぶ.インパルス信号は,信号処理においてのサンプリング波形とし
て用いられ,次の性質がある.
第 6 章 標本化定理
48
性質
• (6-1) より,インパルス信号の積分は 1 である.
∫
∞
δ(t)dt = 1
−∞
• インパルス信号は0点にある,幅 0,面積 1 の信号なので,積分区間が 0 を含
まないときには 0,0 を含むときには 1 となる.
∫
{
τ
δ(t)dt = u(τ ) =
−∞
1; τ > 0
0; τ < 0
• 関数 f (x) とインパルス信号の積の積分は,インパルス信号が非ゼロの値をと
る時の f (x) の値となる.
∫
∞
f (t)δ(t)dt = f (0)
−∞
一般的には
∫
∞
−∞
f (t)δ(t − τ )dt = f (τ )
と書ける.
• インパルス信号には,すべての周波数成分を均等に含む.
∫ ∞
F (ω) =
δ(t)e−jωt dt = 1, − ∞ < ω < ∞
−∞
この事実は,非周期矩形波信号について,τ → 0 の極限を取ることでも確認で
きる.
6.1.1 周期インパルス信号のフーリエ変換
インパルス信号は,(5-19) で与えられる周期矩形波信号を用いて
δ(t) =
lim
τ →0,T →∞
x(t)
(6-3)
で表すことができるが,
s(t) = lim x(t)
τ →0
(6-4)
とした場合には,周期インパルス信号となる.
そのために,図 5-11 の包絡線をインパルス信号のフラットな関数 x = 1 に置き換えれ
ば,周期 T のインパルス信号を得ることができる.故に,周期 T の周期インパルス信号
のフーリエ級数は
∆(f ) =
∞
n)
1 ∑ (
δ f−
T n=0
T
第 6 章 標本化定理
49
で与えられる.
6.2 畳み込み
畳み込み演算は,電子工学の広い分野において多いに応用されている.その一例とし
て,図.6-1 で示した信号 x(t) が,インパルス応答が図.6-2 で示した h(t) となる線形シス
テムに入力された場合の出力を考える.
x(t)
∆
···
0
x(i∆)∆
x(i∆)
∆ · · · i∆
図 6-1
t
···
入力信号と近似
h(t)
0
t
図 6-2
インパルス応答
入力信号を ∆ の幅に刻み,0 ≤ ρ < ∆ となる変数 ρ を用いて,時刻を t =
∑∞
i=0 (ρ+i∆)
で表すと,入力信号は
x(t) =
∞
∑
x(ρ + i∆)
(6-5)
i=0
となる.ここで,曲線の積分を求める仕法を用いて,x(i∆) を用いて,x(ρ+i∆),0 ≤ ρ < ∆
の入力を近似する.つまり
x(ρ + i∆) ≈ x(i∆),
0≤ρ<∆
(6-6)
とすると,パルスの強度はパルスの面積に対応するので,i∆ から ρ + i∆ までの入力信号
の強度は x(i∆)∆ で表せる.そして,信号 x(t) の時刻 i∆ ≤ t < ρ + i∆ での入力に起因
する出力を
x(i∆)h(t − i∆)∆
(6-7)
第 6 章 標本化定理
50
で近似できるが,ここで h(t − i∆) での i∆ は入力の遅延による出力の時間遅れである.
考えているシステムが線形システムであるため,(6-5) と (6-7) より,x(t) の入力に起
因する出力は
r(t) ≈
∞
∑
x(i∆)h(t − i∆)∆
(6-8)
i=0
となる.∆ → 0 と極限を取れば,近似値の誤差は無視できるので
∞
∑
r(t) = lim
∆→0
x(i∆)h(t − i∆)∆
(6-9)
i=0
が得られる.
最後に,τ = i∆ とすると,dτ = ∆ となり,次の積分式
∫
∞
x(τ )h(t − τ )dτ
r(t) =
(6-10)
0
が得られるが,一般化した次の式
r(t) := x(t)
∫ ∗ h(t)
∞
=
−∞
x(τ )h(t − τ )dτ
(6-11)
を畳み込みと呼ぶ.
図.6-3 を用いて,式 (6-11) で表す畳み込みの演算を説明することもできる.図形 (a)
h(t)
x(t)
0
0
t
t
(a)
(b)
x(τ )
h(t − τ )
h(−τ )
0
τ
t
(c)
図 6-3
畳み込み演算
で表される信号が (b) の信号と畳み込みを行う場合,r(t) は次のようなステップで行わ
れる.
1. x(t) の信号は t 軸と同じ形で τ 軸に持ってくる
第 6 章 標本化定理
51
2. h(t) の信号は縦軸を中心に左右反転させて τ 軸に反映させる
3. r(t) を求める時に,h(τ ) のゼロ点を x(τ ) のゼロ点より t 離れたところにおく
4. 以上の操作で二つの信号が重なっている部分の面積を求める
畳み込みの性質
• 交換則を満たす
x1 (t) ∗ x2 (t) = x2 (t) ∗ x1 (t)
• 分配則を満たす
x1 (t) ∗ [x2 (t) + x3 (t)] = x1 (t) ∗ x2 (t) + x1 (t)x3 (t)
• 結合則を満たす
[x1 (t) ∗ x2 (t)] ∗ x3 (t) = x1 (t) ∗ [x2 (t) ∗ x3 (t)]
• インパルス信号との畳み込み
x(t) ∗ δ(t) = x(t)
• 畳み込み信号のフーリエ変換
信号 r(t) = x(t) ∗ h(t) に対して,R(ω) := F [r(t)] とすると,
R(ω) = X(ω)H(ω)
(6-12)
が成り立つ.ただし,X(ω) := F [x(t)], H(ω) := F [h(t)] である.
式 (6-12) で示しているように,時間領域で二つの信号の畳み込みを行って得られる信
号のスペクトルは,二つの信号のスペクトルの積となり,逆に周波数領域で畳み込まれた
信号は,時間領域では積で表せる.この性質を利用し,信号を二つの信号の畳み込みに分
解することで,スペクトルの計算が簡単になることが多い.
6.2.1 畳み込み性質の応用例
例えば,スペクトルが図 6-4 となる信号の時間領域での表現を求めるとき,定義に基づ
いて計算すると信号の周波数領域の表現が
f + 1; −1 < f ≤ 0
1 − f; 0 < f ≤ 1
X(f ) =
0;
otherwise
となることより,逆フーリエ変換により時間領域の表現は
∫
∞
x(t) =
−∞
X(f )ej2πf t df
第 6 章 標本化定理
52
1 X(f )
f
−1
−
1
2
図 6-4
∫
1
2
0
三角信号
∫
0
(f + 1)e
=
1
j2πf t
1
(1 − f )ej2πf t df
df +
−1
0
である.
ここで,二番目の積分について g = −f の置換を行うと
∫
∫
0
x(t) =
(f + 1)e
j2πf t
(f + 1)e
j2πf t
∫−1
0
=
∫−1
0
=
(
∫
−1
∫0 0
df +
(1 + g)e−j2πgt dg
(1 + f )e−j2πf t df
−1
(f + 1) e
−1
df −
j2πf t
+e
−j2πf t
)
df
0
=2
(f + 1) cos 2πf tdf
−1
となる.
最後に,
(
sin 2πf t
2πt
)′
= cos 2πf t を用いて部分積分法を適応すると時間領域での次の表
現式が得られる.
∫
0
x(t) = 2
(f + 1) cos 2πf tdf
[(
]0
)
∫ 0
sin 2πf t
sin 2πf t
−2
=2
(f + 1)
df
2πt
2πt
−1
−1
1
0
[cos 2πf t]−1
=
2π 2 t2
1 − cos 2πt
=
2π 2 t2
= sinc2 (πt)
−1
もう一つの計算方法として,図 6-4 の波形は,方形波
{
U1 (f ) =
1;
|f | ≤ 12
0 : otherwise
(6-13)
第 6 章 標本化定理
53
の畳み込み
X(f ) = U (f ) ∗ U (f )
に分解できる.
{
方形波の信号
x(t) =
1
τ;
0:
|t| ≤ τ2
otherwise
(6-14)
のスペクトルは,X(f ) = sinc(πf τ ) となるので,時間領域と周波数領域での信号の相対
関係より,スペクトルが
{
U (f ) =
1;
0:
|f | ≤ F2
otherwise
となる信号は sinc(πt) である.従って,スペクトルが図 6-4 となる信号の時間領域での
表現は
x(t) = sinc2 (πt)
である.
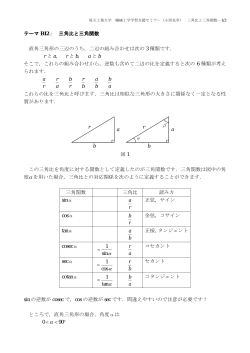
6.3 標本化定理
定理 3. 標本化定理情報信号 x(t) の帯域を B とすると,時間間隔 Ts ≤
1
2B
で抽出
した標本から情報信号を完全に復元できる.
情報信号 x(t) は周期 Ts のインパルス信号 (標本化パルス) によって離散化されると仮
定すると,標本化パルスのスペクトルは図.6-5-(b) で示しているような周期 fs =
1
Ts
の
周期インパルスとなる.
一方,標本化された信号は,情報信号 x(t) と標本化パルス s(t) の積で表せるので,そ
の時間領域表現は
r(t) = x(t)s(t)
(6-15)
となる.従って,周波数領域では二つの信号のスペクトル畳み込みとなり,図 6-6 の下方
に示したように標本化された情報信号のスペクトルは,標本化される前の情報信号のスペ
クトルが fs 間隔で繰り返される.そのために,fs ≥ 2B を満たすと,フィルタ操作で周
波数領域で X(f ) を完全に復元することができる.
標本化された情報信号 R(f ) に対して,周波数領域でフィルタ
{
P (f ) =
1; f ≤ fs
0; f > fs
をかけると情報信号のスペクトルを復元することができる.つまり,
X(f ) = R(f )P (f )
(6-16)
第 6 章 標本化定理
54
時間領域
周波数領域
X(f )
x(t)
0
0
t
(a)
情報信号
f
B
S(f )
s(t)
0
0
t
Ts
(b)
図 6-5
周期インパルス信号
fs =
1
Ts
f
情報信号と周期インパルス信号
となるので,時間領域では標本化された情報信号と時間領域での P (f ) 信号が畳み込み演
算を行うことになる.前の計算で,方形波の (逆) フーリエ変換は図 5-10 で示したような
波形となるので,時間領域では標本を図 6-7 のように補間することになる.
第 6 章 標本化定理
55
r(t) = x(t)s(t)
時間領域
0
t
周波数領域
R(f ) = X(f ) ∗ S(f )
fs =
1
Ts
0
B
図 6-6
情報信号のサンプリング信号
f
第 6 章 標本化定理
56
周波数領域
1
X(f ) = R(f )P (f )
0
f
fs
x(t) = r(t) ∗ p(t)
時間領域
t
0
図 6-7
情報信号の復元
57
第7章
量子化
前章で紹介した標本化定理によれば,周波数が制限された信号 x(t) に対して,信号に
含まれている最高周波数の二倍以上の周波数で採集した標本 x(nTs ), n = 0, 1, 2, · · · を
sinc(πtfs ) の波形で補間を行えば,歪みなく信号 x(t) を復元できる.従って,送信側では
連続信号 x(t) をすべて送信する必要がなく,標本値 x(nTs ) の情報を送信すれば,受信側
では受け取った情報に基づいて連続信号 x(t) を復元できる.
連続信号 x(t) に対して,サンプリングした信号 x(nTs ) は,実数の値を取るので,ディ
ジタル方式で送信することができない.その理由は,一般的にサンプリングされた信号は
x(nTs ) ∈ R となり,R が非可算集合*1 になっていることにあるので,x(nTs ) を可算集合
X の内にある要素 xn ∈ X に変換する必要がある.ここで,xn の確率分布によっては X
は必ずしも有限の要素を持つ必要がないが,ここでは信号空間が |X | < ∞ となる有限集
合と仮定する.
標本化された信号 x(nTs ) から有限集合内の xn への変換する方法が量子化である.量
子化の方法では,量子化関数 Q(x) を用いて,xn ≈ Q(x(nTs )), xn ∈ X , の信号に変換す
るので,量子化雑音
qn = x(nTs ) − xn
(7-1)
が生じる.そのために,量子化雑音のエネルギーの期待値が最小になるように最適化を行
う必要があり,x(nTs ) の実数空間での確率密度関数を PX (x) とおくと
∫
2
∞
σ :=
−∞
[x − Q(x)]2 PX (x)dx
(7-2)
が最小になるような量子化関数
Q̂(x) := arg min σ 2
(7-3)
Q(x)
を探す必要があるが,この最適化は PX (x) が既知であることが前提となっている.
量子化によって x(nTs ) を有限集合 X 内の要素 xn に変換したので,効率は必ずしもい
いとは言えないが,xn はディジタル方式で送信可能である.
*1
非加算集合は無限の無限倍の要素を持つ.
第 7 章 量子化
58
7.1 線形量子化
有限集合 X 内の要素を等間隔に配置して量子化する方法を線形量子化と呼び,最小の
間隔を量子化ステップ幅と呼ぶ.サンプリングした信号 x(nTs ) ∈ R を量子化する際に,
X から x(nTs ) にもっとも近い値を出力する量子化器の入出力特性は図 7-1 に示したよう
になるが,ここで
∆=
min
x,x′ ∈X ,x̸=x′
{|x − x′ |}
である.
xn
3∆
2∆
∆
x(nTs )
−5∆/2 −3∆/2−∆/2 ∆/2 3∆/2 5∆/2
−∆
−2∆
−3∆
図 7-1
線形量子化器の入出力特性
この入出力特性は,小数点以下を四捨五入する関数 round(x) を用いて
Q(x) := round
(x)
∆
∆
(7-4)
で表すことができる.
図 7-1 で明らかであるが,線形量子化の量子化雑音は ∆/2 を超えることはないので
|qn | ≤ ∆/2
が成り立つ.線形量子化雑音の分散を考えるために,量子化ステップ ∆ が十分小さく,
量子化レベル
N = |X |
は十分大きいと仮定すると,式 (7-2) で与えられる分散は
σ2 =
N
−1 ∫ xn +∆/2
∑
n=0
xn −∆/2
PX (x)(x − xn )2 dx
(7-5)
第 7 章 量子化
59
で計算されるが,∆ は十分に小さいと仮定したため,区間 [xn − ∆/2 xn + ∆/2] で PX (x)
は P (xn ) と同じであるとみなすことができ,y = x − xn なる変数変換を行うと,式 (7-6)
は次のように書き換えられる.
2
σ =
N
−1
∑
∫
PX (xn )
n=0
∆/2
y 2 dy =
−∆/2
N −1
∆2
∆2 ∑
PX (xn )∆ =
12 n=0
12
(7-6)
量子化レベルを M ビットの二進数で表示すると,量子化レベルは N = 2M となるり,
図 7-1 から |x(nTs )| の最大値と ∆ の間には
∆ = 2 max{|x(nTs )|}/2M
(7-7)
の関係が成り立つ.max{|x(nTs )|} = 2M −1 ∆ なので,標本値 x(nTs ) の取りうる値を
[−2M −1 ∆ 2M −1 ∆] で一様分布であると仮定すると,信号の分散は
∫
1
2M ∆
2M −1 ∆
x2 dx =
−2M −1 ∆
22M ∆2
12
となる.したがって,量子化器の信号対雑音比 S/N は
S/N =
E{x(nTs )2 }
= 22M ≈ 6M [dB]
σ2
となり,量子化ビットが 1 ビット増えると信号対雑音比は 6dB 改善する.
第 7 章 量子化
60
babababababababababababababababab
周波数 1 の余弦波 x(t) = cos 2πt を Ts =
1
16
間隔でサンプリングして生成した
数列
x(nTs ) = (
≈(
cos 0π
8
cos 4π
8
cos 8π
8
cos 12π
8
1
0
−1
0
cos π8
cos 5π
8
cos 9π
8
cos 13π
8
0.92
−0.38
−0.92
0.38
cos 2π
8
cos 6π
8
cos 10π
8
cos 14π
8
0.71
−0.71
−0.71
0.71
cos 3π
8
cos 7π
8
cos 11π
8
cos 15π
8
0.38
−0.92
−0.38
0.92
)
)
は無理数を含むので,このままではディジタル通信方式では送信することがで
きない.
そこで,M = 4 ビット線形量子化器を用いると,max{|x(nTs )|} = 1 なので,
量子化ステップ幅は式 (7-7) より ∆ =
{
X4 =
1
8
になり
}
1 2 3 4 5 6 7
0, ± , ± , ± , ± , ± , ± , ± , −1
8 8 8 8 8 8 8
から x(nTs ) は
(
xn =
7 7 6 3
3
6
7
7
6
3 3 6 7
0 −
−
−
−1 −
−
− 0
8 8 8 8
8
8
8
8
8
8 8 8 8
)
となる.
この場合,式 (7-2) に基づいて量子化雑音を計算すると σ 2 = 0.002 となり,式
(7-6) で求めた値 0.0013 に比べて若干大きくなるが,それは 0 を入れることに
より符号が正のときに 1 がないので,入力信号 1 の量子化雑音が大きくなるか
らである.
量子化ビットを 1 ビット増やして M = 5 にすると,量子化ステップ幅は ∆ =
から
1
16
{ n }15
X6 = {0, −1} ∪ ±
16 n=1
から x(nTs ) は
(
xn =
6
11
15
15
11
6
6 11 15
15 15 11 6
0 −
−
−
−1 −
−
−
0
16 16 16 16
16
16
16
16
16
16 16 16 16
と量子化されるので,量子化雑音の実際値と理論値はそれぞれ 4.0 × 10−4 と
3.3 × 10−4 となり,4 ビット量子化器より雑音レベルがおよそ 1/4 になる.
)
61
第8章
ディジタル変調方式
標本化し量子化を行ったデジタルデータは 0,1 のビット列で表現される.そして,デジ
タル通信の目的はこれらのビット列を送信側から正確に希望の受信側に届けることであ
る.電気信号の有無でこれらのビット列を表すと,送信機と受信機をつなぐ電気回路で,
直流信号は品質劣化が起こりやすい.また,電波や光などで送信する場合には,これらの
ビット列を周波数の高い電磁波に変換する必要がある.つまり,物理的な通信路を通じて
情報を伝送するためには,送信したい情報ビット列を伝送に適した周波数の高い正弦波/
余弦波の信号に変換する必要がある.
A cos(2πfc t + ϕ)
(8-1)
(8-1) で表した余弦波の一般式には,振幅,周波数および位相の三つの変数がある.変調
方式もこれらに対応して,各変数を独立に使用し,1 ビットを送信する次の変調方式が存
在する.
1. 振幅シフトキーイング変調 (ASK: Amplitude Shift Keying)
送信ビットに基づいて振幅 A を変化させる
2. 周波数シフトキーイング変調 (FSK: Frequency Shift Keying)
送信ビットに基づいて周波数 fc を変化させる
3. 位相シフトキーイング変調 (PSK: Phase Shift Keying)
送信ビットに基づいて位相 ϕ を変化させる
次 に ,上 記 の 一 つ の 変 数 を 用 い て ,一 度 に Q ビ ッ ト を 送 信 す る こ と で ,通 信
速 度 を 上 げ る こ と を 考 え る .送 信 ビ ッ ト 列 送 信 b = (b0 , b1 , · · · ), bi ∈ {0, 1} と し
た 場 合 ,送 信 ビ ッ ト 列 を Q ビ ッ ト ず つ 区 切 っ て ,b0 = (b0 , b1 , · · · , bQ−1 ), b1 =
(bQ , bQ+1 , · · · , b2Q−1 ), · · · , bn ∈ {0, 1}Q を生成する.これらを整数の二進数表現と見
なすと,bn は整数 dn ∈ {0, 1, 2 · · · , 2Q − 1} に一意的に対応できるので,一度に Q ビッ
トを送信する問題は {0, 1, 2 · · · , M }, M = 2Q − 1 の整数を送信する問題に形式化でき
る.そして,上記の変数を用いて M = 2Q の信号点を生成し変調を行う方式をそれぞれ
第 8 章 ディジタル変調方式
62
MASK(M -ray ASK), MFSK, MPSK と呼ぶ.
また,複素平面上の実部に対応する余弦波と虚部に対応する正弦波における二つの変数
を組合わせる場合には
• 直交振幅変調 (QAM: Quadrature Amplitude Modulation)
データに基づいて余弦波と正弦波の振幅 A を変化させる.
• 振幅位相変調 (APSK: Amplitude and Phase-Shift Keying)
データに基づいて合成波の振幅と位相 ϕ を変化.
などの変調方式が存在する.
8.1 MASK 変調
MASK 変調では,入力されるデータ dn ∈ {0, 1, 2 · · · , M − 1} から
sn (t) =
dn
A cos 2πfc t, 0 ≤ t < T
M −1
(8-2)
を生成して送信するが,ここで各パラメータは
• A:最大振幅
• M :入力データの最大値
• fc :搬送波の周波数
• T :一つのデータを送信する時間幅
となる.
babababababababababababababababab
ビット列 b = (00011011) を MASK 方式で 2 ビットずつ送信する場合,b を 2
ビットずつ区切り b0 = (00),b1 = (01),b2 = (10),b3 = (11) を生成する.
整数表現を用いると d0 = 0,d1 = 1,d2 = 2,d3 = 3 となるので,送信データ
d = (0 1 2 3)
(8-3)
を ASK 変調後の波形は図.8-1 のようになる.
8.1.1 MASK 復調
非同期復調
MASK 信号には,非同期復調と同期復調の二種類がある.非同期復調では,入力され
た信号を帯域フィルタに通した後,図.8-2 の包絡線検波回路を用いて包絡線を抽出し,復
第 8 章 ディジタル変調方式
63
1
0.8
0.6
0.4
0.2
0
−0.2
−0.4
−0.6
−0.8
−1
0
0.5
1
1.5
2
2.5
3
3.5
4
図 8-1 MASK 信号の波形
調することができる.非同期復調器は,復調器で搬送波の周波数を正確に知らなくても復
調することができるが,同期復調器より復調の性能が劣る.
vIn (t)
vOut (t)
図 8-2 MASK 信号の非同期包絡線検波回路
同期復調
一方,搬送波の高い精度で周波数の周波数と位相が検知できる場合には,図.8-3 の同
期復調を用いて,復調性能を高めることができる.
⊗
cos 2πfc t
図 8-3
MASK 信号の同期復調
第 8 章 ディジタル変調方式
64
同期復調でも受信された信号を帯域フィルタに通して,雑音の影響を抑えるところは非
同期復調器と同様であるが,その後はその出力された信号と搬送波の正弦波 cos 2πfc t の
積信号
dn
A cos2 2πfc t
M −1
dn
A (1 + cos 4πfc t)
=
2(M − 1)
sn (t) cos 2πfc t =
(8-4)
dn
を生成する.そして,低域フィルタを使って倍数波成分を取り除くと振幅が A 2(M
−1) の
直流が得られ,電圧/電流の強度から送信データを判定する.
8.1.2 MASK 信号のスペクトル
式 (8-2) から,時間領域での MASK 信号は図 8-4-a) で示したように送信信号波形と搬
送波の乗算となる.その故に,時間領域信号と周波数領域信号の関係式 (6-12) により,
MASK 信号のスペクトルは送信信号のスペクトルと搬送波スペクトルの畳み込みである.
送信信号
{
x(t) =
1
τ
0
|t| < τ2
otherwise
のスペクトルは,図 5-14 で示したように
X(f ) = sinc(πf τ )
となる.
一方,搬送波 cos 2πfc t は周波数 2πfc の成分しか持たないので,三角基底において,
ωc = 2πfc に対する各次高調波の係数は
{
1
an =
0
n=1
otherwise
bn = 0, n = 1, 2, · · · である.そのために,式 (5-17) から複素指数基底での係数は
{ 1
|n| = 1
2
yn =
0 otherwise
となり,スペクトルは図 8-4 で示したようになる.
インパルス信号の性質により任意の関数はインパルス信号と畳み込み演算を行うとその
関数が出力される.その故に, 信号で余弦波の振幅に対して変調を行った場合,周波数領
域ではその信号のスペクトルが変調波の周波数を中心とした帯域にシフトする.
8.1.3 BPSK 変調の誤り率
データ m = 0, 1 に応じて振幅を 1 もしくは −1 に変化させる変調方式を BPSK(Binary
Phase Shift Keying) 変調と呼ぶ.基本波形を s(t) とした場合,BPSK 変調方式ではデー
第 8 章 ディジタル変調方式
65
x(t)
1
τ
Sa (πf τ )
−
τ
2
⇔
τ
2
0
t
f
0
∗
×
cos 2πfc t
⇔
1
[δ(f + fc ) + δ(f − fc )]
2
f
t
=
=
1
[Sa (π(f + fc )τ ) + Sa (π(f − fc )τ )]
2
x(t) cos 2πfc t
⇔
t
a)
f
時間領域信号
b)
周波数領域信号
図 8-4 MASK 信号の波形
タ m = 0, 1 に応じて時間 T 内で次の信号
{
s0 (t) =
s1 (t) =
s(t)
−s(t)
(8-5)
を送信する.そこで,受信側で s(t) を復調した後のエネルギーを Es とし出力される雑音
は分布が N (0, N0 /2) の AWGN とする.また,一般的な状況を考えて 0 と 1 が送信され
る確率をそれぞれ P0 = P と P1 = 1 − P とする.
同期復調で用いる基底 cos 2πfc t での s0 (t),s1 (t) および雑音の係数を s0 ,s1 ,n とお
くと,受信信号は AWGN 通信路を通過するので,p(r|s0 ) と p(r|s1 ) の分布はそれぞれ
√
√
N ( Es , N0 /2) と N (− Es , N0 /2) になるが,Pm ≤ 1/2 の場合,ML 判定は最適には
ならないので,送信確率を考慮した Pm p(r|sm ), m = 0, 1, を図.8-8 に描く.
すると,式 (4-9) の判定ルールは受信信号点 r において,P0 p(r|s0 ) と P1 p(r|s1 ) を
比較し値が大きくなるのを送信データと判定することになるので図.8-8 で P0 p(r|s0 ) と
第 8 章 ディジタル変調方式
66
1
p(r|m = 0)
2
1
p(r|m = 1)
2
s1
s0
rth
−
!
Es
0
D1
!
Es
r
D0
図 8-5
BPSK 信号の判定領域
P1 p(r|s1 ) が交差するところが判定境界となり,MAP 判定は
{
0; r ≥ rth
m̂ =
1; r < rth
(8-6)
で表せる.
rth では P0 p(rth |s0 ) = P1 p(rth |s1 ) が成り立つので
√
Es −rth |2
N0
|
1
P0 √
e−
πN0
√
|rth + Es |2
1
N0
= P1 √
e−
πN0
から
N0
1−P
rth = √ ln
P
4 Es
(8-7)
が得られる.
送信データ 0 が送信され,判定領域 D1 で受信されたときと,逆に送信データ 1 が送信
され,判定領域 D0 で受信されたときには誤りとなるので
∫
∫
rth
∞
Pe = P0
p(r|s0 )dr + P1
p(r|s1 )dr
−∞
rth
√
√
E
−
r
E
+
r
s
th
s
th
= PQ √
+ (1 − P )Q √
N0
2
(8-8)
N0
2
となる.ただし,Q(x) 関数は平均値 0,分散 1 の正規分布 N (0, 1) が x を超える確率
1
Q(x) = Pr{N (0, 1) > x} = √
2π
∫
∞
x
t2
e− 2 dt
第 8 章 ディジタル変調方式
67
と定義され,平均値 µ,分散 σ 2 の正規分布 N (µ, σ 2 ) に対しては次の式が成り立つ.
(
2
Pr{N (µ, σ ) > x} = Q
特に Pm =
1
2
x−µ
σ
)
の場合,式 (8-8) は rth = 0 より
(√
Pe = Q
2Es
N0
)
=Q
(√ )
2γ
(8-9)
に簡略化できるが,γ = Es /N0 は信号雑音比 (SNR) である.
8.2 MFSK 変調
入力されるデータ dn ∈ {0, 1, 2 · · · , M − 1} に対し,MFSK 変調の信号は
sn (t) = A cos 2π(fc + ∆dn )t, 0 ≤ t < T
(8-10)
で表されるが,ここで ∆ は隣接周波数の間隔であり,(8-3) のデータを送信するときの波
形は次の図.8-6 のようになる.
1
0.8
0.6
0.4
0.2
0
−0.2
−0.4
−0.6
−0.8
−1
0
0.5
1
図 8-6
1.5
2
2.5
3
3.5
4
MFSK 信号の波形
MFSK 変調の復調も MASK 信号の復調と同じく,非同期と同期復調が存在するが,い
ずれも MASK 信号の復調素子を並列に並べて構成することができる.図.8-7 は MFSK
信号の同期復調のブロック図であるが,ここでは受信された信号を中心周波数が fc ,
fc + ∆,· · · ,fc + (M − 1)∆ となる図.8-3 で示した同期復調に同時に入力する.最大値判
定器では,M 個の同期復調器から出力が最大となるものを探すことで MFSK 変調信号の
周波数を判定する.
第 8 章 ディジタル変調方式
68
fc
(非)同期検波
fc + ∆
MFSK信号
最大値
(非)同期検波
判 別
fc + (M − 1)∆
..
.
(非)同期検波
図 8-7
MFSK 信号の復調
8.3 MPSK 変調
MPSK 変調では位相にデータの情報を埋め込み,信号
sn (t) = A cos [2π(fc t + dn /M )] , 0 ≤ t < T
(8-11)
を生成するので,信号配置図は図.8-8 となり,(8-3) のデータを送信するときの波形は次
···
2π
2π
M
1
M
0
2π
M −1
M
···
図 8-8 MPSK の信号配置図
の図.8-9 となる.
MPSK 変調は位相を使用しているため,非同期復調ができない.図.8-10 は MPSK
信号の同期復調器を示しているが,ここでは,帯域フィルタを通した信号に対して,同じ
周波数で直交する二つの正弦波 cos 2πfc t と sin 2πfc t を用いて乗積を行うので,出力は
それぞれ
yI (t) = A cos [2π(fc t + dn /M )] cos 2πfc t
第 8 章 ディジタル変調方式
69
1
0.8
0.6
0.4
0.2
0
−0.2
−0.4
−0.6
−0.8
−1
0
0.5
1
1.5
2
2.5
3
3.5
4
図 8-9 MPSK 信号の波形
成分判定
⊗
cos
信号
位相判定
MPSK
cos 2πfc t
⊗
sin
成分判定
sin 2πfc t
図 8-10 MPSK 信号の復調
{
}
A
2πdn
=
cos
+ cos [2π(2fc t + dn /M )]
2
M
yQ (t) = A cos
}
{ [2π(fc t + dn /M )] sin 2πfc t
A
2πdn
=
− sin
+ sin [2π(2fc t + dn /M )]
2
M
(8-12)
となる.yI と yQ の信号を低域フィルタに通すと,二次周波数成分はカットされ,それ
ぞれ
2πdn
A
cos
2
M
A
2πdn
zQ = − sin
2
M
zI =
第 8 章 ディジタル変調方式
70
が出力される.従って,
dn = −
M
tan−1
2π
(
zQ
zI
)
(8-13)
を計算することで,MPSK 信号の位相が判定できる.
8.3.1 MPSK 変調の誤り率
各データ m ∈ M の送信確率が 1/M の場合,AWGN での信号の判定境界は隣りの信
号を結ぶ直線を直角に二分するので,信号 s0 の判定境界は図.8-11 で示すようになる.
s1
s0
D0
sM −1
図 8-11 MPSK 信号の判定境界
信号の受信エネルギーを Es とすると,各信号の振幅は
√
Es となるが,信号配置点
の対称性より,MPSK 信号の誤り率は s0 信号の誤り率と等しくなるので,送信信号
(√
)
√
s0 = ( Es , 0) が送信された場合,受信信号 r = (rI , rQ ) =
Es + nI , nQ が誤って
判定される確率を考える.
(
ここで,実部と虚部の雑音 nI , nQ は互いに独立でガウス分布 N 0,
N0
2
)
に従うと仮定
すると共同確率密度関数は
1 − (rI −
p(rI , rQ ) =
e
πN0
√
2
Es )2 +rQ
N0
(8-14)
となり,次の変数置換
{
R
=
Θ =
により
√
2
rI2 + rQ
tan−1
rQ
rI
√
pR,Θ (r, θ) =
1 − r2 +Es −2N Es r cos θ
0
e
πN0
(8-15)
第 8 章 ディジタル変調方式
71
に書き換えると,Θ の周辺確率密度関数は
∫
∞
pΘ (θ) =
pR,Θ (r, θ)dr
(8-16)
0
となる.t = √
r
N0 /2
として変数置換を行うと,,式 (8-16) は γ =
pΘ (θ) =
∫
1 −γ sin2 θ
e
π
∞
te−
√
(t−
2γ cos θ )2
2
Es
N0
の関数として
dt
(8-17)
0
と書けるので,MPSK 変調の誤り率は s0 の誤り率より
∫
Pe = 1 −
π/M
−π/M
pΘ (θ)dθ
(8-18)
と表現できるが,M = 2, 4 以外式 (8-18) の簡略化した式は知られていない.
8.4 QAM 変調
上で紹介した MASK では周波数が fc となる正弦波(或は余弦波)の振幅に情報を載せ
るが,周波数が fc となる波形には,cos 2πfc t と sin 2πfc t の直交する二つの成分が存在
する.そのために,余弦波と正弦波の振幅にそれぞれ dnI , dnQ ∈ M の二つの整数を同時
に送信することができるが,このような変調方式が QAM 変調となる.
簡単のために,(8-2) で
A
M
= 1 とすると,QAM 変調方式では (dnI , dnQ ) の整数組に応
じて
{
snI (t) =
snQ (t) =
dnI cos 2πfc t
dnQ sin 2πfc t
を生成し,時間区間 0 ≤ t < T でその加算信号
sn (t) = snI (t) + snQ (t)
= dnI cos 2πfc t + dnQ sin 2πfc t
(8-19)
を送信する.
QAM 信号は図.8-10 で示している MPSK 信号の復調器で復調することができるが,こ
の場合 (8-12) はそれぞれ
dnI
2
dnQ
yQ (t) =
2
yI (t) =
となり,これらの出力から送信された (dnI , dnQ ) を判定できる.
式 (8-19) での二つの波形は互いに直交するので,M = {−3, −1, 1, 3} の場合,図.8-12
のような信号配置図に対応できる.ここでは,M = |M| = 4 より,|M2 | = 16 の信号点
が存在するので,0 から 15 までの整数を各信号点に対応させることで情報を送信できる.
第 8 章 ディジタル変調方式
72
Q
I
−3
0
−1
1
3
図 8-12 QAM の信号配置
式 (8-19) では,余弦波と正弦波の成分を別々に表記しているので,変調方法の表現に
は便利であるが,実際に送信される波形を考えるために,Part1 資料での式 (5) と同様に
cn
√
d2nI + d2nQ
(d )
n
= − tan−1 dnQ
(8-20)
sn (t) = cn cos (2πfc t + ϕn )
(8-21)
ϕn
=
I
とおくと,式 (8-19) は
と書ける.つまり,実際に送信される波形は (dnI , dnQ ) によって振幅と位相が変化する
一つの正弦波となる.
式 (8-21) の信号形式の表現に便利なのが信号の複素数表現である.送信するデータ組
に対して複素数表現
を使用し,
dn = dnI + jdnQ
(8-22)
xn (t) = dn e−j2πfc t
(8-23)
とすると
sn (t) = ℜ{xn (t)}
より,送信される信号は式 (8-23) の実部となるほか,式 (8-20) を用いて送信は計の位相
も (8-22) から簡単に計算できる.
QAM 変調は一つの周波数を用いて,時間 T の間に M 内の二つの整数 nI , nQ を送る
ことができるので,周波数の利用効率が高くデジタル回線での主流の変調方式となってい
第 8 章 ディジタル変調方式
73
る.現在は信号処理技術の発展により,1024QAM なども実用化されているが,未だシャ
ノンが示した周波数利用効率の限界に到達できる一般的な方法は見つかっていない.シャ
ノンが示した周波数利用効率の限界を達成する上で
• 信号配置点の最適化
• ビットラベリングの最適化
• 適切な誤り訂正符号の適応
などが特に重要と思われているが,これらの問題は互いに影響するほか,通信システムの
構造や情報が伝達する通信路などとも複雑に関連するので,一般的な議論の展開はとても
困難である.
8.4.1 QAM 変調の誤り率
I,Q の両軸に M 個の信号点を持ち,図.8-12 のように配置した QAM 信号は I 軸と Q
軸の判定結果は互いに影響しないので個別に誤り率を考えることができる.それで,M
を偶数とし,I 軸での信号点の間の最小距離を d であると仮定すると,各配置点での振幅
は図.8-13 のようになる.
d
0
···
−
···
(M − 1)d
3d
··· −
2
2
−
d
2
d
2
(M − 1)d
3d
···
2
2
図 8-13 QAM 信号の I 軸の信号配置図
各データが送信される確率を
1
M
とすると,受信電力の期待値は
∑ [ (2m − 1)d ]2 1
Es = 2
2
M
m=1
)
(
M/2
2d2 ∑
1
2
=
m −m+
M m=1
4
M/2
で表されるので
N
∑
n=1
n2 =
N (N + 1)(2N + 1)
6
(8-24)
第 8 章 ディジタル変調方式
74
および
N
∑
n=
n=1
N (N + 1)
2
より
Es = d2
M2 − 1
12
(8-25)
が得られるので
√
d=
12Es
M2 − 1
(8-26)
の関係式が成り立つ.
各データの送信確率はすべて同じであることから隣接する二点においての判定境界は二
つの点の中心,すなわち信号からの距離が
(M −1)d
点,− 2
と
(M −1)d
2
d
2
の所となる.その故に,両端に位置する信号
√
Es を d に置き換えて求められ
(
)
d
=Q √
(8-27)
2N0
の誤り率は式 (8-9) での
POuter
となるが,それ以外の信号点は両側ともに誤る可能性があるので,誤り率も倍となり
(
PInner = 2Q
√
d
2N0
)
(8-28)
と書ける.
各信号の送信確率が一様なので,I 軸の誤り率は
M −2
2
POuter +
PInner
M
(M
)
2(M − 1)
d
=
Q √
M
2N0
PI =
(8-29)
となり,対称性より Q 軸の誤り率も
2(M − 1)
PQ = PI =
Q
M
(
d
√
2N0
)
(8-30)
である.QAM 信号は I 軸と Q 軸が共に正しく判定された時に誤らないので,QAM 変調
の誤り率は
Pe = 1 − (1
( − PI )(1)− PQ )
1
= 2PI 1 − PI
2 (
)[
(
)]
d
M −1
d
4(M − 1)
Q √
1−
Q √
=
M
M
2N0
) [ 2N0 (
)]
(
d
d
1−Q √
≈ 4Q √
2N0
2N0
= 4POuter (1 − POuter )
で表される.
(8-31)
(8-32)
第 8 章 ディジタル変調方式
75
8.5 ビットラベリング
後述する誤り訂正符号は二進数のビット単位での誤り訂正符号を主に扱うので,シンボ
ルからビットへの変換例として,図.8-14 で示した一次元の 8PSK 変調のマッピング*1 に
ついて考える.
2
3 (011)
(010)
(011)
(010)
4 (100)
1
(000)
(110)
(111)
5 (101)
(001)
(001)
0 (000)
(100)
(101)
7 (111)
6 (110)
図 8-14
8PSK 信号の Gray ラベリング
ラベリングは M 内の整数を一意な二進数に変換すればよいので,各要素に対して二進
数展開をすることで図.8-14 の円の外側で示した自然ラベリングが得られる.
一方,送信された信号が雑音の影響を受けると,送信された信号点は受信側で他の信号
と判定されることがあるが,通常隣合う信号点に判定されることが多い.その故に,隣り
合う信号はことなるビット数が少ないことが望まれる.しかし,自然ラベリングルール
に従うと,0 が 7 に間違えた場合,すべてのビットが異なり,3 ビットのエラーを引き起
こす.
自然ラベリングの改善策として考案されたのが Gray ラベリングであるが,隣合うラベ
リングは 1 ビットのみ異なるのが特徴であり,一次元*2 の場合には次のようにして構成で
きる.
1. L = {(0), (1)}
2. L 内の要素の先頭に 0 を付けた集合 L0 = {(00), (01)} を生成する.
3. L 内の要素の順番を逆にし,先頭に 1 を付けた集合 L1 = {(11), (10)} を生成
する.
4. L = L0 ∪ L1 とし,必要に応じて 2~4 を繰り返す.
二次元以上の信号配置点については,一般的な Gray ラベリングの方法は知られていな
*1
Gray ラベリングは信号が熱雑音のみに影響される通信路では最適となる場合がある.
*2
任意の信号点の周辺に,最小距離ぐらい離れている信号点は高々二点存在する.
第 8 章 ディジタル変調方式
76
い.しかし,図.8-12 のように信号点が方形に配置された場合には,一次元でのラベリン
グルールを縦と横に実行することで,二次元 Gray ラベリングを生成できる.
babababababababababababababababab
図.8-12 の信号配置点は,横と縦共に四つの信号点があるので,まず横軸に対
して一次元の Gray ラベリングを行い
(00) (01) (11) (10)
を生成する.
その後,上で生成された信号点集合を一つとみなし,上下に鏡面コピーを行い,
上の部分の先頭に 0,下の部分の先頭には 1 を追加する.
(000) (001) (011) (010)
(100) (101) (111) (110)
同じ操作を繰り返すと,次のような二次元 Gray ラベリングが生成される.
(0000)
(0100)
(1100)
(1000)
(0001)
(0101)
(1101)
(1001)
(0011)
(0111)
(1111)
(1011)
(0010)
(0110)
(1110)
(1010)
Q
(0000)
(0001)
(0011)
(0010)
(0100)
(0101)
(0111)
(0110)
1
3
I
−3
−1
0
(1100)
(1101)
(1111)
(1110)
(1000)
(1001)
(1011)
(1010)
図 8-15 16QAM 信号の Gray ラベリング
77
第9章
多重アクセス方式
国語辞書では通信を「郵便・電信・電話などによって情報を伝達すること.」と解釈し
ているが,通信工学での通信の目的は,情報を誤りなく希望の相手に伝えることにあり,
郵便物と同じく,正しい情報であっても間違った相手に届けるのは失敗した通信となる.
その故に,届ける情報そのもの以外に,誰に届ける情報なのかが区別できる「住所情報」
を埋め込む必要があるが,その役割を果たしているのが多重化である.
たくさんのユーザをつなぐ通信網において,ユーザペアごとに電話線を引いて回線を設
置するには莫大なコストがかかり現実的ではない.その故に,実際の電話回線やインター
ネット通信網などでは単一の基幹通信路を複数のユーザが共有して使用するがそれを多重
アクセス (multicacess) と呼ぶ.(図 9-1 参 照.)
通信路
図 9-1
多重アクセス
搬送波は正弦波であるため,変調方式と同じく,「住所情報」を埋め込めるのは,振幅,
周波数,時間,位相であるが,振幅や位相は通信路の影響を受けやすく,情報の取り出し
が複雑であるので,今のところ多重化での応用は見られない.従って,多重アクセス方式
には周波数を利用した(直交)周波数分割多重方式,時間を利用した時間分割多重方式お
よび時間ー周波数平面に広がる拡散系列で多重化を行う符号分割多重方式(スペクトル拡
散通信とも呼ばれる)が存在する.
第 9 章 多重アクセス方式
78
9.1 周波数分割多重アクセス (FDMA)
FDMA(Frequency-division Multiple Access) 方式では,図 9-2 で示したようにユーザ
ごとに異なる情報伝送用周波数を割り当て,受信機は各ユーザに割り当てられた周波数に
対応したフィルタを用いることで,特定のユーザの情報のみを取り出す.
f0
受信機
フィルター0
f1
フィルター1
図 9-2 FDMA 方式
FDMA 方式は構成が簡単のため,第一世代のアナログ移動通信の方式に採用された.
ところが,時間軸上有限な信号は周波数軸以上では無限に広がるので,各信号のスペクト
ルは図. 9-3 のように境界面で重なり合う.その故に,FDMA 方式は干渉信号のエネル
フィルター0 ガード フィルター1
f
f0
図 9-3
干渉
f1
FDMA 方式の信号スペクトル
ギーが無視できるぐらい周波数間隔を十分に空け,ユーザ間の干渉を避ける必要があり,
周波数利用効率が低い.その故に,近年ではディジタル TV や無線 LAN 等では周波数利
用効率が高い直交周波数分割多重方式 (OFDM) 方式が採用されている.
同じ周波数の正弦波は,位相が異なる正弦波を加算しても周波数が変わらない性質があ
るために,情報を特定の周波数の正弦波で送信すると,直接波と複数の遅延波が加算され
る無線通信では,受信が簡単になるなどのメリットがある.しかし,位相が反転されて加
算された場合には,図. 9-4 で示したように 信号がすべて消える可能性がある.その故
に,OFDM は特定周波数における電力効率の低下に伴う通信性能の著しい劣化を防ぐ必
要があり,一般的には周波数を跨って誤り訂正符号を適応し,周波数ダイバーシチ効果で
誤り率の改善を図る.
第 9 章 多重アクセス方式
79
建物など反射物
基地
局
直接波:
遅延波:
合成波:
図 9-4 OFDM 方式での電力効率低下
9.2 時間分割多重アクセス (TDMA)
第二世帯のデジタル無線通信方式に採用されている TDMA(Time-Division Multiple
Access) 方式では,図 9-5 で示したように,時間軸をフレームと呼ばれる時間単位に分割
する.そして,フレームをさらに複数のタイムスロットに分割して各ユーザに割り当てる
が,各ユーザは自分に割り当てられた時間スロットでのみデータを送信する.
ユーザ0のデータ
タイミング信号
U0
U0
U1
フレーム
U1
ユーザ1のデータ
U0
U1
U0
U1
t
スロット
図 9-5
TDMA 方式でのフレーム構造
TDMA 方式では,デジタル回路を用いてフレームに含まれているタイミング信号を検
出することで,自分に割り当てられたスロットを高精度に検出でき,理想的な通信路では
図 9-6 で示したスイッチングで比較的簡単に多重化を実現できる.
しかし,TDMA 方式はユーザが増えると,スロットの割当が困難になるほか,帯域制限
のある通信路を通過すると図. 9-7 のように送信波形が歪み,波形間の干渉を引き起こす.
特に無線通信路のような多重波反射が存在すると,直接波と反射波は時間差を持って受
信側で加算される.それで,直接波と,遅延波の時間差がデータの送信間隔より短かけれ
ば,サンプリング点を調整することでデータを判定することができる.ところが,高速通
信のためにはデータの送信期間を短くする必要があるので,図.9-8 で示したように遅延波
第 9 章 多重アクセス方式
80
受信機
f
ユーザ0
ユーザ1
f
図 9-6 TDMA 方式での送受信
送信信号
受信信号
t0
t1
t
図 9-7 TDMA 方式での帯域制限の影響
が他のユーザに割り当てられたタイムスロットに影響を及ぼし,ユーザ間干渉を引き起
こす.
各ユーザのデータが混在する信号から,データ判定の精度を上げるためにはすべての
ユーザのデータを同時に判定する必要があり,それに伴う計算量も爆発的に増加する他,
希望ユーザ以外のデータも判定されるのでセキュリティ上の問題もあるので,TDMA 方
式は高速無線通信に適していない.
U1
U2
U3
U4
U5
U6
U7
U8
U1
U2
U3
U4
U5
U6
U7
..
..
.
U8
.
U1
U2
U3
U4
U5
U6
U7
U8
X
X
X
X
X
X
U7
U8
+)
U1
X
X
図 9-8
TDM 方式のマルチパスの影響
第 9 章 多重アクセス方式
81
9.3 符号分割多重アクセス (CDMA)
FDMA と TDMA は,それぞれ周波数と時間の通信に使用できる資源を各ユーザに均
等に割り当てて多重化を行う.ユーザがこれらの資源を割り当てられた後は,一対一の場
合と同じく通信を行うことができる.しかし,電話回線での音声通信のように使用する時
間の割合が少ない場合,通話以外の場合にも割り当てられた資源を占有しているため,利
用効率が悪くなる.
それで,第三代移動通信システムでは各ユーザは拡散系列と呼ばれる系列を用いて変
調した信号を拡散する CDMA(Code-Division Multiple Access) 方式を採用した.図.9-9
が CDMA 方式のシステム構成図となるが,CDMA 方式では各ユーザに異なる拡散系列
を割り当てて,ユーザの信号を区別する.CDMA 方式で用いられる拡散系列は,データ
受信機
c0 の
整合フィルター
c0
c1 の
整合フィルター
c1
図 9-9 CDMA 通信方式
の判定精度を高めるために,自己相関が 0 シフトで最大の値を出力し,他のシフトでは極
力小さい値となるような系列を選択する.また,ユーザ間干渉を押さえるために,拡散系
列の相互相関においては,すべてのシフトで出力が小さくなる系列組を用いる.
CDMA はスペクトル拡散方式とも呼ばれるが,例えば,0番目のユーザが図 9-10 で示
した BPSK 変調されたデータ
d0 = (+1, −1, +1, +1)
を送信したい場合,自分に割り当てた拡散符号 c0 を用いて信号
s0 = (d0,0 c0 , d0,1 c0 , d0,2 c0 , d0,3 c0 )
= (c0 , − c0 , c0 , c0 )
(9-1)
を生成し,図 9-11 で示したようにレートの高いチップを用いてデータを広い周波数に拡
散して送信する.
CDMA 方式は図 9-12 で示した整合フィルターを用いて受信する.受信信号 r を拡散
系列 c0 の整合フィルターに通すと,その出力は
Rr,c0 (τ ) =
∞
∑
i=−∞
r(τ )c∗0 (i + τ )
(9-2)
第 9 章 多重アクセス方式
BPSK
82
変調信号
1
1
1
τ
-1
X(f )
f
−
···
1
τ
0
1
τ
···
変調信号の電力スペクトル密度関数
図 9-10
拡散前のスペクトル密度関数
変調信号
BPSK
1
1
1
-1
1 1
1 11
拡散系列:(+ − + − − + − + +−)
-1 -1-1 -1 -1
(+ − + − − + − + +−) (+ − + − − + − + +−)
(+ − + − − + − + +−)
(− + − + + − + − −+)
拡散後の信号
図 9-11
スペクトル拡散
で表せるが,整合フィルターは τ = 0 の出力点での信号対雑音比が最大との意味で最適で
あるので,その点の出力に基づいて送信データを判定する.
CDMA 方式は第三代移動通信システムの初期などで使われていたが,ユーザが増えた
場合のユーザ間干渉が問題になり,後半から現在に至るまで OFDM とそれから派生した
方式が主流となっている.
第 9 章 多重アクセス方式
83
r
z −1
z −1
···
c∗m,L−1
×
c∗m,L−2
×
c∗m,1
×
c∗m,0
×
···
!
x
図 9-12
整合フィルター
84
第 10 章
情報源符号化
情報源符号化の目標は,復元したデータが与えられた要求を満たす前提で,最大限に圧
縮し,なるべく少ないビット数でデータを表現する事である.圧縮されたデータから情報
源データを完全に復元できる場合の圧縮方法は無歪み圧縮と呼ばれ,ある程度の歪みを許
す圧縮方法は歪みあり圧縮と呼ぶ.ここでは,離散値で時間的に独立な情報源データ系
列,つまり離散無記憶情報源 (discrete memoryless source) に対する無歪み圧縮の限界を
紹介する.
10.1 情報源符号化定理
X の要素で値をとる確率変数 X の確率分布 PX (x) が与えられた時,
∑
H(X) = −
P (x) log P (x)
(10-1)
x∈X
を確率変数 X のエントロピーと呼ぶ.
定理 4. 無歪み情報源符号化定理離散無記憶情報源 X の平均符号長を L̄ とすると,
L̄ > H(X) となる無歪み圧縮は可能であるが,L̄ < H(X) となる無歪み符号化は存在し
ない.
Proof. 厳密な証明は他の参考書に委ねることにして,ここでは大まかな考え方のみを
示す.
−1
集合 X = {xi }M
i=0 上の情報源 X の確率分布を Pr{X = xi } = pi とした場合,長さ n
の系列 x におよそ npi 個の xi が含まれている系列を典型系列と呼び,典型系列の集合を
A と記する.
x ∈ A が出現する確率を考えると,n が大きい場合,すべての x に対して
Pr{X = x} ≈
M
−1
∏
(pi )npi
i=0
∑M −1
= 2 i=0 npi log pi
= 2−nH(X)
(10-2)
第 10 章 情報源符号化
85
となり,|A| = 2nH(X) が成り立つので,A 内の系列は nH(X) ビットで符号化できる.
一方,任意の ε < 1 に対して,n を大きく取れば,X から発生した系列が典型系列なら
ない確率を δ 以下に押さえられるので,誤差は 0 に限りなく近くなれる.
10.2 情報源符号化の例
情報源符号化の最も簡単な方法は,各データを一定長さのバイナリ符号に変換すること
である.例として,次の表 10.1 で示した情報源 X の符号化を考える.
表 10.1 X の確率分布と符号語
X
x0
x1
x2
x3
Pr{X = xi }
1
2
1
4
1
8
1
8
10.2.1 固定長符号
この場合,|X | = 4 なので,各データを長さ log |X| = 2 ビットの異なる二進数列に対
応させることで符号化できる.
E(x0 ) = 00
E(x1 ) = 01
E(x2 ) = 10
E(x3 ) = 11
このように符号語長が一定の符号を固定長符号と呼ぶが,情報源出力
x = (x0 x2 x1 x0 x1 x0 x3 x0 )
(10-3)
E(x) = (0010010001001100)
(10-4)
に対応する符号器の出力は
となる.
復号器では,ビット列をを 2 ビットずつ区切って復号すればよいので,(10-4) の復号結
果は
(|{z}
00 |{z}
10 |{z}
01 |{z}
00 |{z}
01 |{z}
00 |{z}
11 |{z}
00 )
x0
x2
x1
x0
x1
x0
x3
x0
となり,(10-3) と一致する.
この例で示した符号語長はすべて 2 なので,平均符号語長も 2 となる.ところが,表
10.1 の分布に従う確率変数 X のエントロピーは
1 1
1
1
1
7
1
H(X) = − log − log − 2 log = bit
2
2 4
4
8
8
4
となり,無歪み情報源符号化定理によると,平均符号語長において改善の余地がある.
第 10 章 情報源符号化
86
10.2.2 可変長符号
表 10.1 で示した分布のように,各データの出現頻度がことなる情報源に対して平均符
号語長を短くするためには,出現頻度の高いデータには短い符号語長を割り当て,逆に出
現頻度の低いデータには比較的に長い符号語長を割り当てる必要があるが,このような符
号は符号語長が一定ではないため,可変長符号とよぶ.可変長符号の例として,表 10.1
での分布に対して,表 10.2 の三つの符号を考える.
表 10.2 X の確率分布と符号語
E \X
x0
x1
x2
x3
E1
1
00
01
10
E2
0
10
110
111
E3
0
01
011
111
符号器 E1 は符号系列として
x1 = (|{z}
1 |{z}
01 |{z}
00 |{z}
1 |{z}
00 |{z}
1 |{z}
10 |{z}
1 )
x0
x2
x1
x0
x1
x0
x3
x0
を出力するが,この符号系列はデータの区切りによって送信データ以外に
(|{z}
10 |{z}
1 |{z}
00 |{z}
1 |{z}
00 |{z}
1 |{z}
10 |{z}
1 )
x3
x0
x1
x0
x1
x0
x3
x0
(|{z}
10 |{z}
10 |{z}
01 |{z}
00 |{z}
1 |{z}
10 |{z}
1 )
x3
x3
x2
x1
x0
x3
x0
..
.
にも復号されるので,一意復号可能符号にはならない.
符号器 E2 では,長さが 3 より短い符号語の最後に 0 で符号の終わりを表している.そ
の故に同じ入力データに対して,符号器 E2 の出力は
x2 = (|{z}
0 |{z}
110 |{z}
10 |{z}
0 |{z}
10 |{z}
0 |{z}
111 |{z}
0 )
x0
x2
x1
x0
x1
x0
x3
x0
となるが,符号系列に対して 0 もしくは (111) が現れたら,それまでの系列を復号すれ
ば,もとのデータを完全に復元できるが,このように遅れなくデータを復元できる符号を
瞬時符号と呼ぶ.
符号器 E3 は E2 とは逆に 0 で符号の始まりを表していて,(10-3) の入力データ系列に
対応する出力は
x3 = (|{z}
0 |{z}
011 |{z}
01 |{z}
0 |{z}
01 |{z}
0 |{z}
111 |{z}
0 )
x0
x2
x1
x0
x1
x0
x3
x0
第 10 章 情報源符号化
87
となる.E3 は復号時に,0 で始まる符号が続く場合には 1 ビットに対応する遅れが生じ,
x3 が続く場合には 3 ビットに対応する遅れが生じるので,一意復号可能であるが,瞬時
符号にはならない.
E2 と E3 のいずれにしても,平均符号長は
L̄2 = L̄3 =
1
1
1
7
× 1 + × 2 + 2 × × 3 = = H(X)
2
4
8
4
で,無歪み情報源符号化定理で示している最適な符号化となる.
10.3 Kraft 不等式
情報源の符号化にあたって,一意復号可能な符号であることは必要条件であり,できれ
ば瞬時符号を構築することが望ましいが,このような符号が満たすべき符号語長は Kraft
不等式によって与えられている.
定理 5. Kraft 不等式
−1
集合 X = {xi }M
i=0 上の情報源 X に対して,一意復号可能な瞬時符号が存在する必要
十分条件は
|X |−1
∑
2−li ≤ 1
(10-5)
i=0
である.ただし,li は xi , xi ∈ X , の符号長である.
Kraft 不等式を理解するために,点線と実線で 0 と 1 を表示する二分木を描き,各ノー
ドまでのパスで符号を表す符号木の上で情報源の符号化を考えると,表 10.2 の符号木は
図 10-1 のようになる.
0
0
1
0
1
(00)
0
(01)
(10)
1
(0)
0
1
(1)
E2
E1
図 10-1
0
(10)
0
(110)
1
(111)
(0)
1
(01)
1
(011)
1
(111)
1
1
E3
表 10.2 の符号木
E1 では,1 から始まる符号が 1 と 10 の二つがあるので,1 を受け取った瞬間には x0 と
判定できないので,瞬時符号にはならない.E2 は,瞬時符号であるが,その特徴はすべて
第 10 章 情報源符号化
88
の符号語はパスの中に他の符号語を含まない.符号語のこのような特徴より,E2 は瞬時
に復号できるほか,一意復号可能であることも自明である.E3 は,符号語が瞬時符号では
ないが,パスの中に他の符号語を含む任意の符号語を間違って復号した場合,後続の符号
語を復号することができないので,一意復号可能である.
つまり,符号木の上である符号の下層に他の符号が存在しない場合,復号時に後続の
データを見なくても符号語が終了していることが判断できるので,一意復号可能な瞬時符
号となる.
Proof. Kraft 不 等 式 を 証 明 す る た め に ,瞬 時 符 号 語 c = (c1 c1 c2 · · · cn ) を 二 進
数 の 区 間 [0.c1 c2 · · · cn 0.c1 c2 · · · (cn + 1)) に 対 応 さ せ ,つ ま り ,実 数 表 現 で c は
[∑n
−i
i=1 ci × 2
)
−i
−n
を代表することにする.すると,c に対して,
c
×
2
+
2
i
i=1
∑n
2−n は c が代表する区間の長さとなる.
瞬時符号の符号木の特徴より,任意の符号は符号木上のパスで先頭に他の符号語を持た
ない.その故に,各符号語が代表する区間は共通部分を持たず,その和は図.10-2 で示し
ているように 1 以上にはならない.
0 → [0.0 0.1)
10 → [0.1 0.11)
110 → [0.11 0.111)
111 → [0.111 1)
⇓
0
0
10
0.1
110 111
0.11 0.111 1
図 10-2 瞬時符号の符号木
10.4 Huffman アルゴリズム
情報源 X の確率分布が与えられた場合,最適な瞬時符号を構成するアルゴリズムは
Haffman によって提案された.
アルゴリズム 1.
第 10 章 情報源符号化
89
1. p1 ≥ p2 ≥ p3 ≥ · · · ≥ pM −1 ≥ pM を満たすようにデータを並べる.
2. pM −1 と pM に対応するデータの符号先頭に 0 と 1 を割り当てる.
3. M = 2 なら符号語を出力して終了.
4. M > 2 なら,(pM −1 + pM ) と残りの確率で,1)から実行する.
例 1. Haffman アルゴリズムの例として,確率分布が次の表 10.3 で与えられた情報源の
符号化を図 10-3 で示している.
表 10.3 X の確率分布と符号語
X
x0
x1
x2
x3
x4
Pr{X = xi }
0.4
0.2
0.15
0.15
0.1
x0
0.4
x1
0.2
0.25
x2
0.15
0.2
x3
0.15
0.1
0
0.4
1
⊕
0.25
0
1
⊕
0
0.15
⊕
x4
0.35 0
0.6
1
1
E(x0 )
(1)
E(x1 )
(000)
E(x2 )
E(x3 )
E(x4 )
(001)
(010)
(011)
図 10-3 Haffman アルゴリズム
1. p0 ≥ p1 ≥ p2 ≥ p3 ≥ p4 と並べ,最後の二つに対応するデータ x3 と x4 に符号語
(0) と (1) を割り当てる.
2. (p3 + p4 ) = 0.25 となるので,p0 ≥ (p3 + p4 ) ≥ p1 ≥ p2 と並べ最後の二つに対応
するデータ x1 と x2 に符号語 (0) と (1) を割り当てる.
3. (p1 + p2 ) = 0.35 となるので,p0 ≥ (p1 + p2 ) ≥ (p3 + p4 ) と並べ, x1 と x2 に割り
当てた符号語の先頭には 0, x3 と x4 に割り当てた符号語の先頭には 1 を追加する.
4. (p1 + p2 ) = 0.35 となるので,(p1 + p2 + p3 + p4 ) ≥ p0 と並べ, x1 x_4 に割り当て
た符号語の先頭には 0 を追加し,x0 には符号語 1 を割り当てる.
Haffman アルゴリズムで表 10.3 で示した確率分布を持つ情報源を符号化すると,エン
トロピー H(X) = 2.1464 に対して,平均符号語が 2.2 となる最適な符号語が得られる.
90
第 11 章
通信路符号化
信号が実際のディジタル通信路を通じて伝送されれる時,通信路の状況や雑音の影響に
より,受信されたディジタル信号は歪んでしまう.通信システムを設計する際には,まず
目的の誤り率を達成するために,信号対雑音比 (SNR) に応じて,帯域信号,変復調方式,
等化器を合理的に設計し,送信情報ビットの誤り率をなるべく低くする.それでも目的の
誤り率を達成できない場合には,通信路符号化を実施する必要がある.
通信路符号化で使われる符号は,情報伝送中の誤りを検出することを目的とする誤り検
出符号と,誤りを検出した上に元の情報を復元する誤り訂正符号の二種類があるが,ネッ
トワーク伝送など誤り検出符号のみを適応した場合には,誤りが検出されたら送信側に再
送要求を出し,誤りが検出されないまで同じ情報を繰り返し伝送する.一方,誤り訂正符
号を実施すると,同じ情報を繰り返し伝送する必要はないが,誤り訂正符号は誤り検出符
号より多くの冗長なビットを送信する必要があるので,一回ごとの通信速度は遅くなる.
情報理論の結論によると,AWGN 通信路では,K ビットの情報列を送信するためには
長さ K の二進数ビット列をランダムに生成するランダム符号を実施すれば,N が増加す
るに従って誤り率を 0 に無限に近づけることができる.しかし,実際にランダム符号を復
号する時には,全ての符号語セット C の中から受信語 r とユークリッド距離が最も近い
符号語を送信符号とする.その故に,符号の検出
ĉ = arg min{∥r − c∥2 }
c∈C
に膨大な計算量が必要となり,実用は不可能に近い.復号時の計算量を削減するために,
実用的な誤り訂正符号は,符号語に代数的な構造を持たせるが,符号構成時にメモリの有
無によって,ブロック符号と畳み込み符号に分類される.
ブロック符号は,二進数の情報系列を K ビットづつ区切って,各々を N > K ビット
の符号語で表し,通信路を通じて順次に送信するが,情報系列長と符号語長の比
R=
K
N
は符号化レートという.ブロック符号では,N ビットの符号語を生成する方法が送信す
る K ビット情報系列のみに依存し,すでに送信された情報系列と無関係であることから,
第 11 章 通信路符号化
91
メモリのない無記憶符号である.
ブロック符号は,K ビットの情報系列を符号化するので,符号語 c は M = 2K 個の長
さ N の二進数ビット系列からなるが,全体の符号語集合 C を符号と呼ぶ.
11.1 パリティ検査による誤り検出
N ビットの二進数は最大 2N 個の異なる二進数ビット列を表すことができるが,ブロッ
ク符号には 2K 個の異なる系列長 N の二進数系列からなっている.その故に,通信路で
雑音などの影響を受けた受信信号が,C に含まれてない受信語 r ∈
/ C に復元された場合に
は誤りが発生したことが分かる.ところが,直接 r ∈ C であるかを判断するためには,C
にあるすべての符号語と比較する必要があるので,実際の応用では計算量上困難である.
それで,簡単に検出できるように,共通の特徴がある符号語から符号を構成するが,パリ
ティ検査ビットを加えるのはその簡単な一例である.
11.1.1 符号化
二進数列に含まれている 1 の数が奇数か偶数かを検査するのをパリティというが,パリ
ティ検査符号では送信ビット列 b の最後に 0 か 1 のパリティ検査ビットを追加して,符号
語に含まれている 1 の数を偶数にするのを偶パリティ検査符号といい,その数を奇数にす
るのを奇パリティ検査符号と呼ぶ.
例 2. 情報ビット列
b = (101101)
偶パリティ検査の符号化を行うと,b には 4 個の 1 が含まれているので,最後にパリティ
検査ビットとして 0 を加えて
c = (1011010)
を符号語とする.
また,情報ビット列
b = (100101)
に対しては,全体の 1 の数が奇数なので,最後に 1 を加えて
c = (1001011)
を符号語とし,符号語に含まれる 1 の数を偶数に保つ.
11.1.2 誤り検出
‘0’ と ‘1’ の二進数に対して,次の XOR ゲートの Mod 2 の和を定義する.
第 11 章 通信路符号化
92
表 11.1 Mod 2 の和
⊕
0
1
0
0
1
1
1
0
偶パリティ検査符号は,受信ビット列 y に対して
x = y0 ⊕ y1 ⊕ · · · ⊕ yN −1
(11-1)
を計算し,x が 1 の場合に「誤りあり」とすることで誤りを容易に検出できる.このよう
な検出は,図. 11-1 で示した XOR ゲートを用いたロジック回路で構成できる.
y0
XOR
y1
y2
y3
y4
y5
XOR
XOR
XOR
XOR
図 11-1
x
誤り検出回路
11.1.3 パリティ検査の性能
パリティ検査符号は簡単なロジックで誤り検出ができる利点があるが,送信した符号語
c = (1011010)
に対して,受信語が
r = (1001110)
になるなどの偶数個の誤りが発生した場合には誤りの検出できない.
また,パリティ検査符号は誤ったビットの位置が判定できないので,訂正はできない.
その故に,パリティ検査符号はレート
R=
K
K +1
で,1 ビットの誤りを検出できる符号である.
11.2 二重パリティ検査符号による誤り訂正
パリティ検査符号は奇数個の誤りの発生を検出できるものの誤り発生の場所が判定でき
ないので,発生した誤りを訂正することはできない.それで,一次元に並べられたビット
第 11 章 通信路符号化
93
を二次元に並べ,誤りの発生箇所を判定できるようにしたのが二重パリティ検査符号で
ある.
11.2.1 符号化
二重パリティ検査符号では,情報ビットを K0 × K1 の行列に並べ,最初には (11-2) で
示したように各列に対してパリティビット p0 , p1 , · · · , pK1 −1 を付加する.
b0,0
b1,0
..
.
b0,1
b1,1
..
.
b1,0
↓
p0
b1,1
↓
p1
···
···
···
···
↓
···
b0,K1 −1
b1,K1 −1
..
.
(11-2)
b1,K1 −1
↓
pK1 −1
それから,(11-2) で生成したバリティビット行も含めた各行に対して更にパリティビッ
トを付加し,次の (K0 + 1) × (K1 + 1) のビット行列を生成する.
b0,0
b1,0
..
.
b0,1
b1,1
..
.
b1,0
↓
p0
b1,1
↓
p1
···
···
···
···
↓
···
b0,K1 −1
b1,K1 −1
..
.
→
→
..
.
b1,K1 −1
↓
pK1 −1
→ qK0 −1
→
q0
q1
..
.
(11-3)
qK0
送信時には,(11-3) で生成されたビット行列の各行を順番に繋いたビット列
(b0 , b1 , · · · , bK1 −1 , p)
を BPSK や QPSK などに変調するが,ここで
bi = (bi,0 , bi,1 , · · · , bi,K1 −1 , qi )
p = (p0 , p1 , · · · , pK1 −1 , qK0 )
である.
例 3. 3 × 4 の二重パリティ検査符号による (110101100101) の符号化を考える.ビットを
1
0
0
1
1
1
0 1
1 0
0 1
に並べた後,各列にバリティビットを付加し
1
0
0
1
1
1
1
1
0
1
0
1
1
0
1
0
第 11 章 通信路符号化
94
を生成する.それから各行に対してもパリティを付加すると
1
0
0
1
1
1
1
1
0
1
0
1
1
0
1
0
1
0
0
1
となり,最終的には
(11011011000101011101)
が変調器に入力される.
11.2.2 復号と性能
二重パリティ検査符号の復号時には,受信された (K0 + 1) × (K1 + 1) のビット列を
(11-3) の形式でメモリに保存し,各行と列に対して図. 11-1 で示したロジック回路を用い
て誤り検出を行う.その時に,誤りが検出された行と列の交点にあるビットを誤りビット
と判定して,その位置にあるビットに対して 1 との Mod 2 和演算を行い訂正する.
上の例で,誤りが発生した場所を × で示し,誤りが検出された行と列をそれぞれ ← と
↑ で示すと,次の図.11-2 で示した通り,二重パリティ検査符号は,一つの誤りに対しては
どの場所で発生しても検出し訂正することができる.
1
0
0
1
1
1
1
1
0 1
× 0
0 1
1 0
↑
1
0 ←
0
1
図 11-2 一つの誤りの場合
次に二ビットの誤りが発生した場合,その誤りが次の図.11-3 のように同じ行(列)で
発生すると,誤りが発生した列は検出できても発生した行が確定できない.つまり,この
場合には誤りの検出はできるが訂正はできない.
1
×
0
1
↑
図 11-3
1
1
1
1
0
×
0
1
↑
1
0
1
0
1
0
0
1
二つの誤りが同じ行で発生した場合
第 11 章 通信路符号化
95
次の図.11-4 は二つの誤りが別の行と列で発生した状況を示しているが,この場合にも
誤りが発生したことは検出できる.しかし,これらの誤りを訂正するには,実際に誤った
所のビットを反転させて訂正するほか,図で下線を引いて示した位置のビットを反転させ
ても誤りが検出されなくなる.つまり,この場合は誤り訂正が一意的ではないので,ビッ
トの正し訂正を保証できない.
×
0
0
1
↑
図 11-4
1 0 1 1
1 × 0 0
1 0 1 0
1 1 0 1
↑
←
←
二つの誤りが同じ別の行と列で発生した場合
つまり,二重パリティ検査符号は,一ビットの誤りを訂正でき,二ビットの誤りを検出
できるレート
R=
K0 K1
(K0 + 1)(K1 + 1)
の符号である.
K0 K1 = C と固定した場合,二重パリティ検査符号での誤りの訂正および検出能力は,
K0 と K1 の設定に無関係なので,符号化レートが最大になるようなパラメーターの設定
について考える.K1 =
C
K0
とおくと
R=
C
C + K0 +
C
K0
+C
からレートが最大になるような K0 を求めると
K0 =
√
C
となり,二重パリティ検査符号は符号化時の行列をなるべく正方行列に近づけたほうが効
率が良くなる.
11.3 最小距離復号
前述のパリティ検査符号は,1 ビットの冗長なビットを付加することで,1 ビットの誤
り検出でき,二重パリティ検査符号は K0 + K1 + 1 の冗長なビットを付加し,1 ビットの
誤り訂正と 2 ビットの誤り検出が可能となる.より多くの冗長なビットを伝送すること
で,誤りの訂正と検出能力は向上するが,ここではまず,冗長ビット数を固定した場合,
訂正および検出できる最大の誤りビット数について理論的に考察する.
‘0’ が送信された時に ‘0’ と正しく判定される確率を P (0|0) とし,‘1’ と誤って判定され
る確率を P (1|0) とおくと,P (0|0) < P (1|0) の場合には判定を逆にすればいいので,一
第 11 章 通信路符号化
96
般性を失わずに
{
P (0|0)
P (1|1)
> P (1|0)
> P (0|1)
(11-4)
と仮定する.
「正しく判定されたビット数」と「誤って判定されたビット数」を表現するために,ハー
ミング距離を定義する.
定義 10. 同じ長さ N のベクトル c と r に対し,同じ位置で値が異なるベクトルの値の数
をハーミング距離とよぶ.
表 11.2 ハーミング距離の例
c
r
dH (c, r)
(0000)
(0001)
1
(0000)
(0100)
1
(0110)
(0101)
2
簡単のために,更に
1. 符号 c ∈ C の符号長はすべて N
2. 符号 c ∈ C が送信される確率はすべて同じである
3. P (1|0) = P (0|1) = Pe <
1
2
4. c ∈ C であるが,r ∈
/ C である.
と仮定する.
c ∈ C が送信される確率はすべて同じであると仮定してあるので,r を受信した時の最
適判定は ML 判定となり,符号 C から r になり得る確率が最も高い符号を送信符号と判
定するのが最適である.
c が r に間違えて判定される確率は
Pr{r|c} = (1 − Pe )N −dH (c,r ) PedH (c,r )
で表される.一方,Pe <
1
2
から Pe < 1 − Pe なので,Pr{r|c} は dH (c, r) の単調減少関
数であり,c は受信語 r とのハーミング距離が大きいほど,受信側でその受信語になり得
る確率が低くなる.
最小距離復号では,受信ベクトル r からハーミング距離が最も近い符号を送信符号と
判定するが,このような符号が複数個存在する場合には,訂正不能の誤りとする.その場
合,次の定理が成り立つ.
定理 6. 符号の最小距離
dmin :=
min
dH (c, c′ )
c,c′ ∈C|c̸=c′
第 11 章 通信路符号化
97
に対して,最初距離復号で正しく復号できる上界は
⌊
tmax =
dmin − 1
2
⌋
(11-5)
である.
Proof. 最小距離にある二つの符号 c と c′ での判定を考える.最小距離復号は ML 判定基
準を満たしているため,二つの判定境界は図.11-5 で示したように,符号を結んだ線を垂
直に二分する線となる.
r
c′
c
dH (c, c′ )
図 11-5
判定境界は
dmin
2
符号の判定領域
を通るが,この境界上のベクトルは誤りと判定されないため,正しく
復号できる上界は (11-5) で表される.
11.4 一般的なパリティ検査符号
表 11.1 の Mod 2 の和に加えて,Mod 2 の積をで定義する.
表 11.3 Mod 2 の積
·
0
1
0
0
0
1
0
1
送信ビット列 b に対して,パリティ検査符号は b の最後に (11-1) で表せるパリティ
ビットを付加するので,符号語は
c = (b, b0 ⊕ b1 ⊕ · · · ⊕ bK−1 )
第 11 章 通信路符号化
98
となり,Mod 2 の和と積を用いた行列の演算を用いて
c = b
1
1
..
.
1
1
..
.
1
1
1 1
(11-6)
:= bG
で表される.ここで
1
G=
1
..
.
1
1
..
.
1
1
1 1
(11-7)
はパリティ検査符号の生成行列と呼ぶ.
一般的には,符号語が (11-6) で表される符号をパリティ検査符号とよび,生成行列も
必ずしも (11-7) のような形式に制限されたものではなく
G=
g0,0
g1,0
..
.
g0,1
g1,1
..
.
gK−1,0
gK−1,1
···
···
···
···
g0,N −1
g1,N −1
..
.
(11-8)
gK−1,N −1
gk,n ∈ {0, 1} の K × N の行列である.
生成行列 G が与えられた時,パリティ検査符号は
C = {bG}b∈{0,1}K
(11-9)
で与えられるので,次の性質を持つ.
1. 0N ∈ C
b = 0K に対応する符号語が 0N となる.
2. c, c′ ∈ C なら c ⊕ c′ ∈ C
c = bG, c′ = b′ G とすると,b ⊕ b′ に対応する符号語は c ⊕ c′ である.
3. 最小距離は
dmin =
min wH (c)
c∈C,c̸=0N
(11-10)
与えられる.
最小距離の定義により
dmin =
min
dH (x, x′ ) =
min
wH (x ⊕ x′ )
x,x′ ∈C,x̸=x′
x,x′ ∈C,x̸=x′
となる.c = x ⊕ x′ とおくと,性質 2 より c ∈ C となるので,(11-10) が成り
立つ.
第 11 章 通信路符号化
99
一般的に符号の最小距離を求めるためには,全ての符号語対 c, c′ ∈ C に対して,ハー
ミング距離を調べ,そこから最小となる距離を判定する必要があるが,パリティ検査符号
においては性質 3 より,最小距離は符号語のハーミング重みのみを考慮すれば良いとのこ
とになるので,符号の性能考察と設計が簡単になる.
11.4.1 誤りの検出
パリティ検査符号の中には生成行列を単位行列 I K と残りの K × (N − K) の行列 Ĝ で
G=
1
g0,K
g1,K
..
.
1
..
.
g0,K+1
g1,K+1
..
.
1 gK−1,K
gK−1,K+1
···
···
···
···
g0,N −1
g1,N −1
..
.
[
]
= I K Ĝ(11-11)
gK−1,N −1
のように表される符号があるがそれを組織符号という.組織符号は誤りの検出と訂正が簡
単になるので,ここでは組織的なパリティ検査符号に限定して誤り検出と訂正の議論を
行う.
符号の生成式 (11-9) および (11-11) より,情報ベクトル b に対応する符号語は
c = (b, bĜ)
で表される.
符号語 c を前の K ビット cL = (c0 , c1 , · · · , cK−1 ) と,その後に続く N − K ビット
cH = (cK , cK+1 , · · · , cN −K+1 ) を分けて c = (cL , cH ) で表すと
cH = bĜ
から
bĜ ⊕ cH = cL Ĝ ⊕ cH = 0N −K
(11-12)
が得られるが,ここで最初の等式は組織符号で c の前の K ビットは b と同じであるから
である.その故に,検査行列と呼ばれる行列
[ T
]
H = Ĝ I N −K
g0,K
g1,K
g0,K+1 g1,K+1
=
..
..
.
.
g0,N −1
g1,N −1
···
···
···
···
gK−1,K
gK−1,K+1
..
.
gK−1,N −1
を作ると,(11-12) より c ∈ C に対しては
cH T = 0N −K
が成り立つ.
1
1
..
.
1
第 11 章 通信路符号化
100
そこで,受信語 r に対して
s = rH T
を s を r のシンドロームとよび
r ∈ C ⇔ s = 0N −K
となる H を符号 C の検査行列という.組織符号は,受信語のシンドロームが 0N −K で
なければ,誤りを含むと判定する.
ここでは生成行列を生成してから検査行列をくつる順に記述を行ったが,この二つの行
列は対の関係であり,符号作成時の順番ではない.
例 4. ハーミング符号の検査行列は,1 から 2m − 1 までの整数を二進数展開したものを
順番に並べて生成する.例えば,m = 3 のハーミング符号は,最後の三列が単位行列にな
るように
1 1
1 1
1 0
1
0
0
0
1
1
0 0
1 0
0 1
0 1
1 0
1 0
0
1
0
0
[ T
]
0 = Ĝ I 3
1
1
0
1
の例を並べ替え,検査行列
1 1 1
H= 1 1 0
1 0 1
(11-13)
を生成する.ここで,(11-13) の形式から
1
1
Ĝ =
1
0
1
0
1
1
1
1
0
1
(11-14)
となるので,生成行列は
1
[
] 0
G = I 4 Ĝ =
0
0
0
1
0
0
0
0
1
0
0
0
0
1
1
1
1
0
1
1
0
1
1
0
1
1
(11-15)
となる.
b = {0, 1}4 に対して,c = bG を求めると,各情報ビットに対応するハーミング符号の
符号語は表 11.4 の通りであるが,この表にある全ての符号語に対して
cH T = 03
が成り立つことを確認できる.
第 11 章 通信路符号化
101
表 11.4 ハーミング符号
b
c
(0000)
(0000000)
(0001)
(0001011)
(0010)
(0010101)
(0011)
(0011100)
(0100)
(0100110)
(0101)
(0101101)
(0110)
(0110011)
(0111)
(0111000)
(1000)
(1000111)
(1001)
(1001100)
(1010)
(1010010)
(1011)
(1011011)
(1100)
(1100001)
(1101)
(1101010)
(1110)
(1110100)
(1111)
(1111111)
11.4.2 誤りの訂正
受信語のシンドロームに基づいて,誤り訂正も簡単にできるのが,パリティ検査符号の
もう一つのメリットある.
最小距離復号は,r とハーミング距離が最も近い符号を送信符号と判定するので
ĉ = arg min {wH (c ⊕ r)}
c∈C
(11-16)
表される.しかし,(11-16) に基づいて復号するには全ての符号語について,ハーミング
距離を求める必要がある.
それで,送信符号語 c に対して,受信語が r となった時に,誤りベクトルを
e := c ⊕ r
(11-17)
とおき,r から誤りベクトルの推定値 ê を求め,ĉ = r ⊕ ê で復号することを考える.
受信語 r のシンドロームは
s = rH T = (c ⊕ e)H T = 0N −K ⊕ eH T = eH T
で表せ,それは符号と無関係に誤りベクトルで一意的に決まる.その故に,シンドローム
第 11 章 通信路符号化
102
が s となる誤りベクトルの中で,ハーミングウェイトが最も小さいのは
ê =
arg min
{wH (e)}
e∈{0,1}N |eH T =s
(11-18)
となり,この計算は受信語と送信符号に無関係なので,事前にオフラインで計算し,受信
信号から求めたシンドロームに基づいて検索すれば良い.
例 5. 例えば,情報ビット b = (1010) をハーミング符号で符号化すると
c = (1010010)
となるが,雑音などの影響で受信側では
r = (1011010)
を受信したとする.
(11-13) の検査行列を用いて r のシンドロームを求めると
s = rH T = (011)
となり,それに対応する誤りベクトルは
(0000011), (0001000), (0010110), (0011101),
(0100101), (0101110), (0110000), (0111011),
(1000100), (1001111), (1010001), (1011010),
(1100010), (1101001), (1110111), (1111100)
の 16 個がある.これらの誤りベクトルの中で,(0001000) のハーミングウェイトが最も
小さいので,シンドローム (011) が検出された時には受信語 r に ê = (0001000) を加算
したベクトル
ĉ = r ⊕ ê = (1010010)
を送信符号語とする.
最後に,ĉ の先頭からの 4 ビットから情報ビット (1010) を復元する.
© Copyright 2026 Paperzz