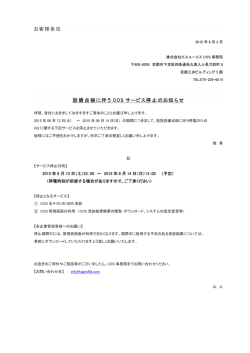
1 ラグランジュ方程式による倒立振子の運動方程式 馮 陶然 1 ラグランジュの運動方程式 ようになる. ラグランジュの運動方程式とは以下で表される方程式 系である. d ∂L ∂L ( )− = Qi dt ∂ q˙i ∂qi (i = 1, 2, … , N ) (1) ここで L はラグラジュアン(Lagrangean)と呼ばれ,T をシステムの総運動エネルギー,U を総位置エネルギー (ポテンシャルエネルギー)とすると,以下で定義される. L=T −U (2) 式(1)の qi はシステムの一般化座標と呼ばれ,システ ムの状態を決定できる座標であればどのような座標を選 択してもよい.ロボットアームの場合には間接変位座標 としてもよいし,基準となる直交座標としてもよい.ま た,Qi は一般化力と呼ばれ,一般化座標に対応した外力 (トルクも含む)を表している.一般化座標と一般化力は ペアになっており,座標が並進変位なら力は並進力,回 転変位ならトルクとなる.なお,式(1)の N は一般化 座標の個数である. ラグランジュの運動方程式を利用するメリットは,シ ステムの運動エネルギーと位置エネルギーさえ表現すれ ば,ラグラジュアン L を作成した後,機械的に式(1)を 計算すれば,所望の運動方程式が得られることにある. T1 = 1 1 1 m1 (ẋ21 + ẏ12 ) + I1 θ̇12 = m1 ẋ2 2 2 2 U1 = m1 gy1 = 0 (6) 次に,第2リンクの重心 G2 の位置座標 (x2 , y2 ) は以下と なる. x2 y2 = a + l sin θ + x = l cos θ + b (7) 式(7)の両辺を時間 t で微分して次式を得る. ẋ2 ẏ2 = θ̇l cos θ + ẋ = −θ̇l sin θ (8) したがって,第2リンクの慣性モーメントを I2 ,運動エ ネルギーを T2 ,位置エネルギーを U2 とすると,以下の ようになる. T2 = = 1 1 m2 (ẋ22 + ẏ22 ) + I2 θ̇2 2 2 1 1 m2 (ẋ20 + 2ẋlθ̇ cos θ + l2 θ̇2 ) + I2 θ̇2 2 2 U2 = m2 gy2 = m2 gl cos θ 2 (5) (9) (10) 以上から,ラグラジュアン L = T1 + T2 − U1 − U2 を求 めると,以下のようになる. 倒立振子の運動方程式 1 1 (m1 + m2 )ẋ2 + m2 θ̇2 l2 2 2 + m2 ẋθ̇l cos θ − m2 gl cos θ L = í L x2 y2 y0 y1 x0 Ü1 Ü0 m2 式 (1) を用い,摩擦抵抗を加え,式(11)に対するラグ ランジュの運動方程式より2組の駆動トルク τ1 , τ2 に関す る運動方程式を得る. Ü2 m1 x1 b x_ 2a f1 Fig. 1: model τ2 今回は Fig.1 倒立振子の運動方程式について述べる. 運動エネルギーと位置エネルギーを求めるには各リン クの重心の位置と並進速度を記述する必要がある. まず,第1リンクの重心 G1 の位置座標 (x1 , y1 ) は以下 となる. x1 = a + x,y1 = b/2 (3) 式(3)の両辺を時間 t で微分して次式を得る. ẋ1 = ẋ,̇ y1 = 0 (11) (4) したがって,第1リンクの慣性モーメントを I1 ,運動エ ネルギーを T1 ,位置エネルギーを U1 とすると,以下の = + = + (m1 + m2 )ẍ − m2 (sin θlθ̇2 − cos θlθ̈) Kx ẋ (2 I2 + m2 l2 )θ̈ + m2 l(− sin θẍ + cos θg) Kθ θ̇ (12) (13)
© Copyright 2026 Paperzz