2012年度修士論文概要
液体メニスカス架橋の基本特性解析
(接触線・接触角の動的挙動の液体反力への影響と架橋の形状解析)
M11T8002K
鳥取大学大学院 工学研究科 機械宇宙工学専攻 応用数理工学コース
1
はじめに
磁気ディスク装置に代表されるように小型機械システム
においては,従来無視されていた表面力(メニスカス力など)
を考慮した設計が必要となっている(1)-(6).本報告では,液体
メニスカスが非常に狭い固体面間に局在する場合の基本特
性を明らかにした.特に,接触線および接触角の動的挙動を
考慮した液体反力解析,メニスカス形状解析を行った.
2
接触線・接触角の動的挙動を考慮した液体反力解析
2.1 三重線の移動速度と動的接触角の関係(7)
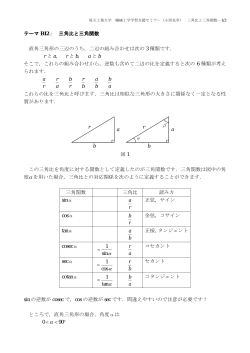
動的接触角とは,図 1 に示すように,固体・液体・気体の
界面(三重線)が前進および後退しているときの接触角であ
る.このとき,動的接触角θ D と三重線の移動速度 vc の関係
式は次式で与えられる.
流体力学的考察に基づく関係式:
vc =
V*
tan θ D ( cos θ E − cos θ D )
3l
(1)
vc = V * ( cos θ E − cos θ D )
(2)
ここで,γ は表面張力,η は粘性係数,θ E は静的接触角,θ D
は動的接触角である.また,V *=γ /η ,l は 15~20 程度の定
数である.式(1) は,散逸エネルギーから移動速度 vc を求め
ているのに対し,式(2)は,液体分子が固体へジャンプする頻
度の関係から移動速度 vc を求めている.
vc
vc
θD
θΕ
z
φ
θD(t)
θE
θE
h(r,0)
r10
h0
(3)
また,境界条件としてラプラスの式を次式で与える.
1
1
p2 − p1 = −γ
−
(4)
r
t
r
m ( ) 1 (t )
ここで,p1は大気圧,p2は境界内側の圧力であり,r1(t), rm(t)
はメニスカスおよび円環メニスカスの半径である.式(4)を境
界条件として式(3)を解くことにより,液体領域に発生する液
体反力を求める.
2.4 液体反力解析結果
まず,境界位置を求めるために液体メニスカスの体積保存
について考える.液体メニスカスの体積 V は次式で与えられ
る.
1
V = π r12 ( t ) hc ( t ) − π r1 ( t ) hc2 ( t ) (π − 2θ D ) ( tan 2 θ D + 1) − 2 tan θ D (5)
h(r,t) θD(t)
r1(t)
}
4
式(5)に対し,体積保存を仮定して
dV/dt=0
(6)
とし,境界位置 r1(t)についての微分方程式を立てる.これを
解いて境界位置 r1(t)とメニスカス半径 rm(t)を求め,式(4)の境
界条件に代入してレイノルズ方程式(3)を解くことにより,液
体領域に発生する液体反力が求まる.この液体反力から,ば
ね定数 km を導出した.ばね定数 km を式(7), (8)に示す.
C1ω 2 3C2
1 −
2πγ r cos θ E
2h0
2
8
1 − A1 1 −
km _ f = −
⋅ 2
2
ω
C
C2
θ
tan
h0
r
2
2
E
10
1 + + 2C1 1 −
2
8
8
C2
2
C1 1 −
1 r10 sin θ E
h0 4h0 sin θ E
2
−
− 4 cos θ E + −
⋅ 2
2cos θ E
R
r10
r10
ω 1 + C2 + 2C 2 1 − C2 (7)
1
2
8
8
2
10
2.2 メニスカスおよび固体面形状のモデル
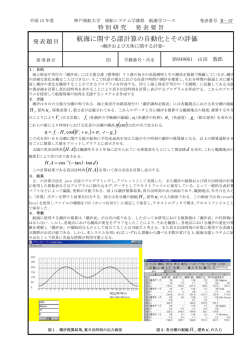
本研究では,図 2 に示すような球面平面間・円環メニスカ
スについて解析を行った.
図 2 は,
上面が垂直振動したとき,
メニスカスの境界位置が変化し,さらに境界位置の移動速度
によって接触角も変化することにより,液量の保存を行う動
的液体メニスカス架橋のモデルである,この動的接触角を考
慮する場合,2 種類の関係式(式(1),(2))を境界条件とし
て取り入れ,メニスカス架橋の動特性を解析する.式(1)を
用いるモデルを流体力学的考察に基づく動的接触角モデル
(HD-DCA model),式(2)を用いるモデルを化学的考察に基
づく動的接触角モデル(C-DCA model)と呼ぶことにする.
rm0
∂h ( r , t )
∂
3 ∂p
rh ( r , t )
= 12η r
∂r
∂r
∂t
流体力学的考察に基づく動的接触角モデル(HD-DCA model)
(a) Advancing
(b) Receding
Fig.1 Velocity of triple line and dynamical contact angle
R
2.3 解析に用いる基礎式
液体反力の解析を行うにあたり,流体潤滑の基礎方程式で
あるレイノルズ方程式は次式で与えられる.
{
化学的考察に基づく関係式:
θD θ
Ε
井谷 紀彦
rm(t)
r
Fig. 2 Dynamic model of liquid meniscus bridge between sphere
and plane
化学的考察に基づく動的接触角モデル(C-DCA model)
C3ω 2 3C2
1 −
2πγ r cos θ E
2h0
2
8
1 − A2 1 −
km _ c = −
⋅ 2
2
ω
C
C2
θ
tan
h0
r
2
2
10
E
1 + + 2C3 1 −
2
8
8
C2
2
C3 1 −
1 r10 sin θ E
h0 4h0 sin θ E
2
−
− 4 cos θ E + −
⋅ 2
2 cos θ E
R
r10
r10
ω 1 + C2 + 2C 2 1 − C2 (8)
3
2
8
8
2
10
ここで,A1, A2, C1, C2, C3 は以下のように与える.
3lr
r
A1 = * 10 , A2 = * 10
V sin θ E
V cos θ E
2V * cos θ E sin 2 θ E
C1 =
3lh0 {2 − tan θ E ⋅ (π − 2θ E )}
h
C2 = 0 (π − 2θ E ) ( tan 2 θ E + 1) − 2 tan θ E
r10
{
C3 =
}
2V cos θ E sin θ E
h0 {2 − tan θ E ⋅ ( π − 2θ E )}
*
(9)
(10)
(11)
2
(12)
z
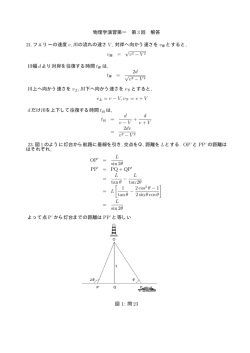
式(7), (8)のグラフを図 3 に示す.ばね定数について,図 3
より,HD-DCA モデルでは一部の領域で正の値をとり、加振
周波数の依存性が高い。一方,C-DCA モデルでは、正の値
をとらず,加振周波数の依存性が低いことが分かった.
AM=R1
φ
R
AN=R2
θ2+φ
M
θ2
hc
A
θ1
0
θ
r
θ
N
ε
π−θ1
Fig. 4
400
1 1 ∆p
+
=
R1 R2
γ
−
r ′′
1 + ( r ′ )2
3
2
+
200
1
2
r 1 + ( r ′ )
1
2
=
∆p
γ
( d = hc / R )
(15)
(18)
ここで,それぞれの文字は以下の通りである.
π
π
π
1
π
ϕ1 = θ1 − , ϕ2 = − (θ 2 + φ ) + , ϕ = − ε , k =
,ε =θ +
2
2
2
2 (19)
1+ c
第 1 種楕円積分
sin ϕ
1
(1 − t )(1 − k t )
2
2 2
dt
(20)
Liquid
0
0
0
200
r, µ m
1 − k 2t 2
dt
1− t2
400
(a)
(b)
Configuration of Liquid Meniscus Bridge
まとめ
本報告では,液体メニスカスが非常に狭い固体面間に局在
する場合の基本特性を明らかにした.
(1) 接触線・接触角の動的挙動を考慮した液体反力解析
メニスカスが局在する固体表面が微小振動した場合の
液体反力解析を行い,レイノルズ方程式を解くことで液
体領域に発生する液体反力を求め,ばね定数kmを導出し
た.特に,接触線および接触角の動的挙動を考慮して解
析を行い,比較した.ばね定数について,HD-DCAモデ
ルでは一部の領域で正の値をとり,加振周波数の依存性
が高い.一方,C-DCAモデルでは,正の値をとらず,加
振周波数の依存性が低く,境界位置のみが変化するVBP
モデル(5)と似た特徴を持つことが分かった.
(2) 静的な場合のメニスカス形状解析
精緻な液体反力解析を目指して、従来円形を仮定して
いた静的な場合の厳密なメニスカス形状を求めた.その
結果、実際のメニスカス形状と比較的よく一致した.
文献
(1)
(2)
(3)
(4)
(5)
第 2 種楕円積分
sin ϕ
Solid
4
(14)
1
x =
(16)
sin ε − sin 2 ε + c
2 HR
2
1
1
1− k
(17)
F (ϕ , k )
y2 =
− cos ε + E (ϕ , k ) −
2 HR
k
k
2
y1 = 1 − cos ε − cos θ1 − 1 E (ϕ1 , k ) − E (ϕ , k ) + 1 − k F (ϕ1 , k ) − F (ϕ , k )
2 HR
k
k
E (ϕ , k ) = ∫
:最小すきま
:平均曲率
:球面曲率半径
:接触角(上)
:接触角(下)
:充填角
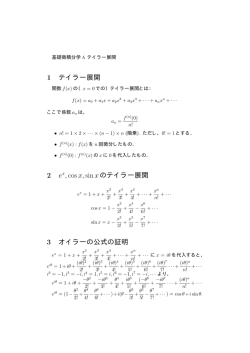
Fig. 5
u2 = − sin (θ 2 + φ ) , y2 = d + 1 − cos φ , x2 = sin φ ,
u1 = − sin (π − θ1 ) , y1 = 0
0
hc=151[µm]
H=–2500[1/m]
R=0.01[m]
θ2 =51°
θ1 =58°
φ =1.8°
(13)
得られた形状方程式(14)に,境界条件(15)を用いて方程式を
解くと,形状の式(16), (17), (18)が得られる.ただし,x=r/R,
y2 はメニスカス上半分の無次元位置(=z/R),y1 はメニスカス
下半分の無次元位置(=z/R)である.
F (ϕ , k ) = ∫
z, µ m
(a)HD-DCA model
(b)C-DCA model
Fig. 3 Effects of equilibrium contact angle and excitation
frequency on spring constant of meniscus bridge
3
静的な場合のメニスカス形状解析
3.1 形状式の導出(8)
図 4 のように,非常に狭い固体表面間に形成された静的な
メニスカスを考え,ラプラスの定理からメニスカス形状方程
式を導出し,厳密なメニスカス形状を求める.ラプラスの定
理(13)において,メニスカス形状の微小増分を考え整理する
と、メニスカス形状方程式(14)が得られる.
Configuration of Liquid Meniscus Bridge
(6)
(21)
3.2 メニスカス形状計算結果
パラメータを用いて数値計算した形状を図 5 に示す.図 5
より,実際のメニスカスと比較的よく一致していることがわ
かる.
(7)
(8)
松岡広成, 福井茂寿, 加藤孝久, トライボロジスト, 45, 2000, 757-768.
松田 京 子, 松岡 広 成, 福井 茂 寿, トライボロジー会議予稿集 福井
2010-9, 2010, 93-94.
稲田一樹, 國富慎補, 松岡広成, 福井茂寿, 日本機械学会 2006 年度年次
大会講演論文集, 5, 2006, 619-620.
石原教示, 小竹森裕介, 松岡広成, 福井茂寿,日本機械学会 2008 年度年
次大会講演論文集, 5, 2008-8.3, 289-290.
H. Matsuoka, S. Fukui and H. Morishita, IEEE Transactions on Magnetics,
Vol. 38, No. 5, 2002, 2135-2137.
H. Matsuoka, S. Matsumoto and S. Fukui, Microsystem Technologies, Vol. 11,
No. 10, 2005, 1132-1137.
トゥジェンヌ,ブロシャール-ヴィアール, ケレ共著 「表面張力の物理
学-しずく、あわ、みずたま、さざなみの世界-」, 吉岡書店,2003.
F. M. Orr, L. E. Scriven and A. P. Rivas, “Pendular rings between
solids:meniscus properties and capillary force,’’ J. Fluid Mech., Vol. 67, Part 4,
1975, 723-742.
© Copyright 2026 Paperzz