「電気回路第三」講義資料 2014年度版
熊本大学工学部情報電気電子工学科
勝木 淳
7.ラプラス変換を用いた過渡現象解析(2)
6.1 初期条件を考慮した等価回路(s領域回路)
6.2 ラプラス変換による解析(1)
RL回路
RC回路
7.1 ラプラス変換による解析(2)
LC回路
RLC回路
7.2 ラプラス変換によるイミタンスの定義
(1) 直流電源とLCを含む回路
右図の LC 回路を直流電圧源で駆動する
場合,回路方程式は 2階の微分方程式とな
る。これを s 関数で表すと,
i
LC直列回路
LC直列回路の s 関数表示
(1) 直流電源とLCを含む回路
右図の LC 回路を直流電圧源で駆動する
場合,回路方程式は 2階の微分方程式とな
る。これを s 関数で表すと,
E
sLI ( s ) − Li (0) + V ( s ) =
s
sCV ( s ) − I ( s ) = Cv (0)
ただし、i(0) = 0。 上の2式から、
∴V ( s) =
i
LC直列回路
1
⎧ E
⎫
+
sLCv
(
0
)
⎨
⎬
2
s LC + 1 ⎩ s
⎭
ここで、次の回路に固有の定数を定義する。
ω0 =
1
L
, Z0 =
C
LC
共振数波数
特性インピーダンス
LC直列回路の s 関数表示
(2) 正弦波交流電源とLCを含む回路
t = 0 で次の正弦波交流電圧を加える。
e(t ) = Em sin ωt
入力インピーダンスは,
Z ( s ) = sL + 1 = Z 0 ( s 2 + ω 2 )
0
sC ω0 s
入力電圧および電流の s 関数は,
LC直列回路
(i) ω ≠ ω0 の場合,部分分数に展開して,
Em ωω0
I (s) =
R0 ω02 − ω 2
⎧ s
s ⎫
− 2
⎨ 2
2
2 ⎬
s + ω0 ⎭
⎩ s + ω
ωω 0 Em
∴ i( t ) = 2
(cos ωt − cos ω0t )
2
(ω0 − ω )R0
【公式】
a
s2 + a2
s
L [cos at ] = 2
s + a2
L [sin at ] =
(ii) ω = ω0 の場合,
ω 2 Ems
I (s) =
R0 (s 2 + ω 2 )2
Em
∴ i( t ) =
ωt sin ωt
2 R0
電流は振動しながら無限に増大する。
⇒ 共振
LC共振現象
(3) 直流電源とRLCを含む回路
右図において t = 0 でスイッチを閉じ,
直流電圧を印加した場合の i(t), v(t)
を求める。
(3) 直流電源とRLCを含む回路
右図において t = 0 でスイッチを閉
じ,直流電圧を印加した場合の i(t),
v(t) を求める。
電源からみたインピーダンスは,
1
R 2
Z(s) = sL + R +
=
(s + 2αs + ω02 )
sC 2αs
よって,
E (s)
2αsE ( s )
I (s) =
=
Z ( s ) R ( s 2 + 2αs + ω02 )
ω02 E ( s )
I ( s)
V (s) =
= 2
sC s + 2αs + ω02
ω0 =
1
共振周波数
LC
R
α=
2L
減衰定数
部分分数の形は,分母=0
とおいた方程式の解の形に
よってかわる。
(2α ) 2 − 4ω02 ><= 0
(i) α >> ω0 の場合
0 < γ < α なる定数
γ = α 2 − ω02 を用いると,
【公式】
⎧ 1 ( s + α ) + α ⎫
V ( s ) = E ⎨ −
,
2
2 ⎬
⎩ s ( s + α ) − γ ⎭
2αE
I (s) =
R{( s + α ) 2 − γ 2 }
よって t 関数は,
⎧
⎞⎫
α
−αt ⎛
v(t ) = E⎨1 − e ⎜⎜ cosh γt + sinh γt ⎟⎟⎬
γ
⎝
⎠⎭
⎩
2αE −αt
i( t ) =
e sinh γt
γR
⇒ 過制動
[
]
L f (t )e at = F ( s − a )
a
s2 − a2
s
L [cosh at ] = 2
s − a2
L [sinh at ] =
(ii) α ≈ ω0 の場合
(i) において γ = 0 なので
⎧ 1
1
α ⎫
V ( s ) = E ⎨ −
−
,
2 ⎬
⎩ s s + α ( s + α ) ⎭
2αE
I (s) =
R( s + α ) 2
よって t 関数は,
v(t ) = E{1 − (1 + αt )e −αt }
2αE −αt E −αt
i( t ) =
te = te
R
L
⇒ 臨界制動
【公式】
[
]
L f (t )e at = F ( s − a )
(iii) α << ω0 の場合
0 <β<ω0なる定数
β = ω02 − α 2
⎧ 1 ( s + α ) + α ⎫
V ( s ) = E ⎨ −
,
2
2 ⎬
⎩ s ( s + α ) + β ⎭
2αE
I (s) =
R{( s + α ) 2 + β 2 }
よって t 関数は,
⎧
⎞⎫
α
−αt ⎛
v(t ) = E⎨1 − e ⎜⎜ cos βt + sin βt ⎟⎟⎬
β
⎝
⎠⎭
⎩
2αE −αt
i( t ) =
e sin βt
βR
⇒ 減衰振動
を用いて,
【公式】
a
s2 + a2
s
L [cos at ] = 2
s + a2
L [sin at ] =
i
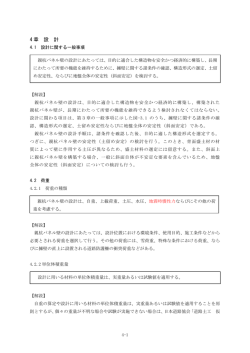
(iii) α < ω0 のとき 「減衰振動」
(R2 << 4 L/C)
「臨界制動」
(ii) α = ω0 のとき
(R2 ~ 4 L/C)
0
「過制動」
(i) α > ω0 のとき
(R2 >> 4 L/C)
t
注)L と C を固定して R のみを変化した場合。
(4) トランスを含む回路
右図の回路の解 q1, q2 を求める。
di 1
di 2 q 1
L
+M
+ =0
dt
dt C
di
di q
L 2 +M 1 + 2 =0
dt
dt C
dq 1
dq 2
= i1 ,
= i2
dt
dt
Q0
(5) 一般的な回路
一般回路網の網目方程式
⎧⎛
q1 ⎫ ⎧⎛
q 2 ⎫
d
d
⎞
⎞
ek (t ) = ⎨⎜ Lk 1 + Rk 1 ⎟i1 +
⎬ + ⎨⎜ Lk 2 + Rk 2 ⎟i2 +
⎬
dt
C k 1 ⎭ ⎩⎝
dt
C k 2 ⎭
⎠
⎠
⎩⎝
⎧⎛
ql ⎫
dq k
d
⎞
+ ⋅ ⋅ ⋅ + ⎨⎜ Lkl + Rkl ⎟il +
∵
= ik , k = 1,2 ,⋅ ⋅ ⋅, l
⎬
C kl ⎭
dt
⎠
⎩⎝ dt
上式のラプラス変換
⎧
Q1 (s) ⎫ ⎧
Q2 (s) ⎫
−0
−0
Ek (s) = ⎨sLk 1 I 1 − Lk 1i1 + Rk 1 I 1 +
⎬ + ⎨sLk 2 I 2 − Lk 2 i2 + Rk 2 I 2 +
⎬
C
C
k 1 ⎭ ⎩
k 2 ⎭
⎩
⎧
Q (s ) ⎫
+ ⋅ ⋅ ⋅ + ⎨sLkl I l − Lkl il−0 + Rkl I l + l ⎬
C kl ⎭
⎩
∵ sQk (s) − q k0 = I k (s), k = 1,2 ,⋅ ⋅ ⋅, l
7.2 ラプラス変換によるイミタンスの定義
ある周波数ωに対する定常現象
スイッチングによる過渡現象
V(s)
V(jω)
E(ω)
E
I(jω)
Z(jω),
Y(jω)
I(s)
Z(s),
Y(s)
例えば、RLC回路
di
1
L + Ri +
idt = v(t )
dt
C
∫
ωに対する定常解析
過渡現象解析
di/dt → jω、∫dt → 1/jωとして、
回路方程式をラプラス変換して、
jωLI + RI +
I
j ωC
=V
1
∴ Z ( j ω ) = j ωL + R +
jωC
I ( s)
= V (s)
sC
1
∴ Z ( s ) = sL + R +
sC
LsI ( s ) + RI ( s) +
【問7.1】
右の回路において,t = 0 でスイッチを
閉じ,直流電源電圧を印加した場合の
出力電圧 v を求めよ。
ただし,C の初期電荷を 0 とする。
© Copyright 2026 Paperzz