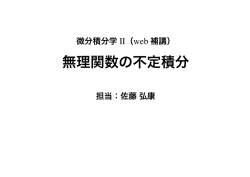
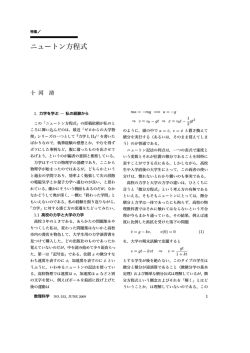
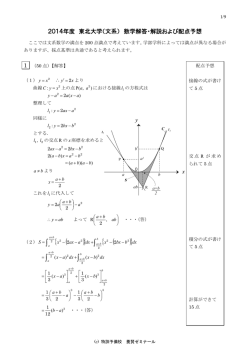
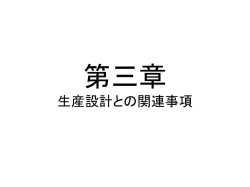
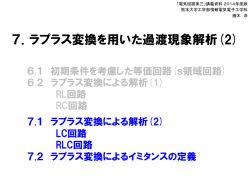
剛体の運動(重心運動と回転) 角速度、角運動量、慣性モーメント、 回転半径、外力のモーメント(トルク) 回転体の運動方程式、エネルギーバランス Copyright (c) 2006 宮田明則技術士事務所 1 剛体の運動は、次の二つの運動の和として扱うことができる (1)重心に全重量を集めた1質点としての運動 (2)重心の周りの回転運動 重心(質点)の運動は、 d 2r0 dv F M = = M dt d t2 重心の位置ベクトル r0 = x0 i + y0 j + z0k = ( x0 , y0 , z0 ) 外力のベクトル F = Fx i + Fy j + Fz k = ( Fx , Fy , Fz ) 速度ベクトル v = v x i + v y j + v z k = (v x , v y , v z ) y F G ω,N r0 ω,L,N z o 質量M x 重心の周りの回転運動は、 d 2θ dL I 2 =N=I dt dt 2 d r0 d 2θ 質点 m 2 = F ⇔ 回転体 I 2 = N dt dt Copyright (c) 2006 宮田明則技術士事務所 2 y 2次元剛体の重心の座標(密度 = ρ ) ydm ∫ yρdxdy xdm ∫ xρdxdy ∫ ∫ S S S x= = ,y= = S ∫ dm ∫ ρdxdy ∫ dm ∫ ρdxdy 重心の座標 S S x o S S S 運動方程式 d 2x d2y d 2θ 質点 m 2 = f x , m 2 = f y ⇔ 回転体 I 2 = N dt dt dt 抵抗体、またはダンパー、復元力があるとき、 d 2r dr d 2θ dθ m 2 +b + kr = f , I 2 + B + Kθ = N dt dt dt dt dy dx y x 運動エネルギーKE 2 2 1 2 1 ⎧⎪⎛ d x ⎞ ⎛ d y ⎞ ⎫⎪ ⎟⎟ + ⎜⎜ ⎟⎟ ⎬ 質点:KEM = mv = m⎨⎜⎜ 2 2 ⎪⎝ dt ⎠ ⎝ dt ⎠ ⎪ ⎩ ⎭ 2 1 2 1 ⎛ dθ ⎞ ⎟⎟ 回転体:KE I = Iω = I ⎜⎜ 2 2 ⎝ dt ⎠ ポテンシャルエネルギーPE PE = mgh など Copyright (c) 2006 宮田明則技術士事務所 3 dθ のときの諸量 dt [質点 iについて], ω ⊥ ri、ri ⊥ fi のとき、 速度 vi = riω = (ω × ri ) 運動量 pi = mi vi = mi riω = (mi ω × ri ) 角運動量 li = ri mi vi = mi ri 2ω = (mi ri × (ω × ri )) 外力のモーメントni = ri f i = (ri × f i ) [剛体] 角運動量 L = ∫ r 2ωdm = ω ∫∫ ρr 2 dxdy = Iω 角速度 = ω = 重心の周りの回転運動 y v = rω (= ω × r ) S × r(x, y ) o S ( ) N = ∑ ni 外力のモーメントトルク ω S x ω, L, N I = ∫ r 2 dm = ∫∫ ρr 2 dxdy を慣性モーメント S S 質量をMとして、I = MK 2 としたとき、 K を「回転半径」という。 S 運動方程式 d 2 xi d p x d 2 yi d p y = = f xi , mi = = f yi 質点 mi 2 2 dt dt dt dt ⎛ d pi ⎞ ⎜⎜ = f i ⎟⎟ ⎝ dt ⎠ d li = ri f i 質点の回転 dt dL dω d 2θ =I =I 2 =N 剛体の回転 dt dt dt ⎛dL ⎞ ⎜⎜ = N ⎟⎟ ⎝ dt ⎠ Copyright (c) 2006 宮田明則技術士事務所 4 物体の形状 軸の位置 円柱 重心を通り円柱の軸に垂直な線 円柱 円柱の軸に一致 中空の円柱 円柱の軸に一致 中空の円柱 重心を通り円柱の軸に垂直な線 球 中心を通る線 中空の球 中心を通る線 直角柱 相対する面の中央を通る線 環 一直径の周り 環 中心を通り環の面に垂直な線 回転半径の二乗K2 l2 r2 + 12 4 r2 2 R2 + r 2 2 R 2 + r 2 h2 + 2 12 2r 2 5 記号 ⎧r = 半径 ⎨ l = 長さ ⎩ r = 半径 ⎧ R = 外の半径 ⎪ ⎨ r = 内の半径 ⎪⎩ h = 長さ r = 半径 2 R5 − r 5 5 R3 − r 3 a2 + b2 12 R = 外の半径 r = 内の半径 a, b = 軸が貫く 面の両辺の長さ R 2 5r 2 + 2 8 3r 2 2 R + 4 R = 環の半径 r = 環断面の 円の半径 出典:守屋富次郎、「力学概論」 Copyright (c) 2006 宮田明則技術士事務所 5 N 例1.円板,円柱、 半径 a, 単位面積当り質量ρ a I = ∫ r ρdr × 2πr = 2πρ ∫ 2 0 a 0 a2 = ρπa ⋅ 2 M = ρπa 2 a4 r dr = πρ 2 3 2 r dr 4 2 a a K 2 = I / M = 2πρ / ρπa 2 = 4 2 Copyright (c) 2006 宮田明則技術士事務所 6 N 例2.角棒、丸棒 長さ L 、 単位長さ当り質量ρ L L I = ∫ x ρdx = ρ ∫ ρ o x 2 0 0 M = ρL 2 例3.球 半径 r ,単位体積当り質量ρ I = 2∫ r dφ φ r π /2 πr 4 cos 4 φ 0 = πρr r cos φ L3 L2 x dx = ρ = ρL ⋅ 3 3 2 L3 L2 K = I / M = ρ / ρL = 3 3 dx r d φ cos φ L π /2 5 ∫ 0 × ρ r dφ cos φ 2 cos 5 φ dφ π ⎤2 ⎡ cos φ sin φ 4 2 = πρr ⎢ + sin φ cos φ + 2 ⎥ 5 15 ⎦0 ⎣ 8πρr 5 4 ρπr 3 2r 2 4 ρπr 3 = = ,M= , 15 3 5 3 8πρr 5 4 ρπr 3 2 2 2 = r K = I /M = / 15 3 5 4 5 Copyright (c) 2006 宮田明則技術士事務所 ( ) 7 ρ (R + l )2 dl ⋅ 2π (R + l )(rd φ cos φ ) 3 = ρ (R + l ) 2πr cos φd φdl 例3 環 π /2 R r 全体積 = 2πR × πr 2 r cos φ 3 ⎛ ( I = 4πr ρ ∫ ⎜ ∫ R + l ) dl ⎞⎟ cos φd φ 0 ⎠ ⎝ − r cos φ 4 r cos φ π / 2 ⎡ (R + l ) ⎤ = 4π r ρ ∫ ⎢ cos φd φ ⎥ 0 ⎣ 4 ⎦ − r cos φ = 4π r ρ ∫ π /2 0 = 8π Rr ρ ∫ 2 π /2 0 R l dl rd φ r cos φ φ ( ) φ )d φ 2 Rr cos φ R 2 + r 2 cos 2 φ cos φd φ (R 2 cos 2 φ + r 2 cos 4 3π 2 ⎞ ⎛π = 8π Rr 2 ρ ⎜ R 2 + r ⎟ 16 ⎠ ⎝4 3 ⎞ ⎛ = 2π 2 Rr 2 ρ ⎜ R 2 + r 2 ⎟ 4 ⎠ ⎝ 3 ⎞ ⎛ = 2π R ⋅ π r 2 ⋅ ρ ⎜ R 2 + r 2 ⎟ 4 ⎠ ⎝ 3 ⎞ ⎛ = M ⎜ R2 + r2 ⎟ 4 ⎠ ⎝ Copyright (c) 2006 宮田明則技術士事務所 8 例題1 機械H17-Ⅳ-12 T θ T I h+r r mg まず、滑車の重心の運 動は: d 2x 横方向の力は 0 → m 2 = 0 dt 垂直方向では、固定点 の抗力を T として d 2h m 2 = mg − T L (1) dt が成り立つ。 回転については、 d 2θ I = Tr L ( 2) d t2 また、次式が成り立つ 。 h = rθ LL (3) この後は、式の計算で ある。 (1), (2 ), (3) から、 T , θ を消去する。 d 2h d 2 h I d 2θ m 2 + T = mg = m 2 + dt dt r d t2 d 2h I d 2h =m 2 + 2 dt r d t2 d 2h ⎛ I ⎞ ∴ 2 ⎜ m + 2 ⎟ = mg dt ⎝ r ⎠ d 2h mgr 2 = 2 dt I + mr 2 2度積分して、(t = 0 で h = 0, dh / dt = 0 ) dh mgr 2 mgr 2 t 2 = t, h = dt I + mr 2 I + mr 2 2 1 2 h I + mr 2 ∴t = r mg また、 2 mgh dθ 1 dh mgr t = = = d t r dt I + mr 2 I + mr 2 ( Copyright (c) 2006 宮田明則技術士事務所 ) 9 前問で、m を滑車の質量とし、 滑車を均質な円板とすれば、Iが 容易に求められる。 それを用いて、落下時の加速度 及び抗力Tを求めよ。 [参考 ] 2 t d h t 2 dh 2 落下速度 : v = dt gdt gt =∫ = = 2 ∫0 3 0 dt dt 3 t t 2 1 落下高さ : h = ∫ vdt = ∫ gt = gt 2 0 0 3 3 回転の角速度と回転角 d φ 1 d h 2 gt h ω= = = ,φ = dt r dt r 3r 円板の慣性モーメント I は、 運動エネルギー r2 I = m であるから、 重心の運動による KE M と、回転による KE I 2 2 1 1 ⎛2 ⎞ 2 2 d 2h ⎛ I ⎞ KE = mv = m gt = mg 2 t 2 ⎜ ⎟ + = は、 m mg M ⎟ ⎜ 2 2 ⎝3 ⎠ 9 d t2 ⎝ r2 ⎠ 2 1 2 1 mr 2 ⎛ 2 gt ⎞ 1 d 2h ⎛ m ⎞ d 2 h 3m KE I = Iω = = mg 2 t 2 ⎜ ⎟ + = = m mg ⎜ ⎟ 2 2 2 ⎝ 3r ⎠ 9 d t2 ⎝ 2 ⎠ d t2 2 失った位置エネルギー − PE d 2h 2 ∴ 2 = g 1 1 dt 3 − PE = mgh = mg ⋅ gt 2 = mg 2 t 2 3 3 すなわち重力の加速度 の 2 / 3 となる。 − PE = KE M + KE I が成り立つ。 滑車のない単純な落下 では、 (1)式から、 また、 − PE = KE M 2 d h 2g 1 であるから、滑車の挿 入により、滑車の T = mg − m 2 = mg − m = mg dt 3 3 回転エネルギー分速度 エネルギーが減少 したことになる。 Copyright (c) 2006 宮田明則技術士事務所 10 例題2 斜面を転がる円板 d 2φ I = Fr L (3) 2 dt また、次式が成り立つ 。 x = r φ LL ( 4 ) r2 2 I = MK = M L (5 ) 2 y B o R φ α G F A Mg α まず、滑車の重心の運 動は: x方向 : 斜面の摩擦力を F として、 d 2x M = Mg sin α − F L (1) d t2 y方向 : 斜面の抗力を Rとして d2y M = Mg cos φ − R L ( 2) d t2 が成り立つ。 回転については、 x 斜面の存在により、 y 方向には運動がないの で, (2 )式は 0 になる。 ∴ R = Mg cos α I 1 d 2 x MK 2 d 2 x (2 )(4 )(5 )から、 F = = 2 r r d t2 r d t2 (1)に代入して、 ⎛ K 2 ⎞ d 2x M ⎜⎜1 + 2 ⎟⎟ 2 = Mg sin α , (5 )を利用。 r ⎠dt ⎝ d 2x r2 1 = g α = g sin α sin d t2 r2 + K 2 1+1/ 2 2 = g sin α 3 Copyright (c) 2006 宮田明則技術士事務所 11 x方向の加速度 d 2x r2 2 A= 2 = 2 g α g sin α = sin 2 dt r +K 3 x方向の速度 2 t d x dx r2 V = dt = 2 g sin α ⋅ t = d t ∫0 d t 2 r + K2 2 = g sin α ⋅ t 3 x方向の位置 t d x 1 r2 g sin α ⋅ t 2 x=∫ dt = 2 2 0 dt 2r +K 1 = g sin α ⋅ t 2 3 角速度 d ⎛ x⎞ 1 ω= ⎜ ⎟= V dt⎝r⎠ r エネルギーバランス 1 PE = − Mgx sin α = − Mg 2 sin 2 α ⋅ t 2 3 2 1 1 ⎛2 ⎞ 2 KE M = MV = M ⎜ g sin α ⋅ t ⎟ 2 2 ⎝3 ⎠ 2 = Mg 2 sin 2 α ⋅ t 2 9 2 1 2 1 1 r2 ⎛V ⎞ 2 KE I = Iω = M ⎜ ⎟ = MV 2 2 2 ⎝r⎠ 4 1 = Mg 2 sin 2 α ⋅ t 2 9 − PE = KE M + KE I もし、斜面に摩擦がな いときは、 F = 0 となり、回転はなく、 加速度 A = g sin α 速度 V = g sin α ⋅ t 1 位置 x = g sin α ⋅ t 2 2 位置エネルギー PE の減分 1 PE = − Mgx sin α = − Mg 2 sin 2 α ⋅ t 2 2 運動エネルギー KE 1 1 2 KE = MV 2 = M ( g sin α ⋅ t ) 2 2 1 = Mg 2 sin 2 α ⋅ t 2 2 − PE = KE が成り立つ。 Copyright (c) 2006 宮田明則技術士事務所 12 追加 基準点を変えたときのI 重心の周りの慣性モー メントを I g とする。 任意の点 A の周りの慣性モーメン トを I A とする。 I g = ∑ (ri − rg )•(ri − rg )mi y i = ∑ (ri • ri )mi + ∑ (rg • rg )mi − 2∑ (ri • rg )mi i S ri − rg G× rg o ω, L, N A m i i ⎛ ⎞ ⎛ ⎞ = ∑ ri 2 mi + ⎜ ∑ mi ⎟ rg2 − 2⎜ ∑ ri mi ⎟ • rg i ⎝ i ⎠ ⎝ i ⎠ 2 = I A + Mrg − 2 Mrg • rg = I A − Mrg2 ∴ I A = I g + Mrg2 i ri x すなわち、任意の点 A の周りの慣性 モーメントは、重心の 周りのモーメ ントに、重心に全重量 が集まったと 見なした A 点の周りのモーメント を 加えた値に等しい。 Copyright (c) 2006 宮田明則技術士事務所 13 応用 基準点を変えたときのI 剛体振子 r = l sin θ O θ l 運動方程式は、θ を減少させる向き のトルクが働くから、 2 2 d θ = −l sin θ × Mg ≈ − Mgl θ I +Ml d t2 d 2θ Mgl g ≈ − = − θ θ 2 2 2 2 2 dt MK + M l K +l /l L = K 2 + l 2 / l の単振子に相当する ことがわかる。 l ( G ) ( I=MK2 ) ( ) f = Mg Copyright (c) 2006 宮田明則技術士事務所 14
© Copyright 2026 Paperzz