現代物理学講義レジュメ
高知工業高等専門学校電気工学科・谷澤俊弘
2014 年 9 月 30 日
第I部
熱力学
1 予備考察
熱力学は、巨視的物体を構成する原子・分子の微視的な振舞には目を向けず、直接、我々に測定可能な巨視
的な物理量(圧力、体積、温度など)の間の関係式を問題にする、経験に基づいた現象論である。そのため、
熱力学においては、今まで数々の実験によって確認されてきたいくつかのもっともらしい仮定を前提条件とし
て採用し、そこから定量的な議論により、様々な関係式を導いていく。
まず、熱力学および統計物理学で用いられるいくつかの用語について簡単に説明しておこう。
熱平衡状態・熱力学的過程
巨視的物体のとる巨視的物理量の集合を熱力学的状態(thermodynamical state)
と呼ぶ。物体をある環境下に放置すると、いずれは巨視的な物理量が一定値を取る状態になるが、これ
を熱平衡状態(thermal equillibrium state)という。物体の置かれた環境や外的条件が変化すると、そ
れらの巨視的物理量は別の熱平衡状態に向かって変化していくが、このような、ある熱平衡状態から別
の熱平衡状態への変化を熱力学的過程(thermodynamical process)と呼ぶ。
状態量
以前、その物質が経由してきた熱力学的状態によらず、現在の熱力学的状態のみで決まる巨視的物理
量を状態量と呼ぶ。
温度 巨視的物理量のひとつとして温度(temperature)という物理量が存在する。温度は「熱い(暑い)
」
「冷
い(寒い)」をあらわす経験的物理量で、温度計によって測定される。経験的に「温度の高い物体と温
度の低い物体を接触させると、二つの物体はそれらの中間のある同一の温度に落着き、熱平衡状態に達
する」ということが成立する。これに反し「温度の高い物質の温度がますます高くなり、温度の低い物
質の温度がますます低くなる」ということは経験的に決して起こらない。また、熱平衡状態にある物質
の温度はいたるところ等しく、何もしないのに、同一物体内に温度差ができることはない。
熱と仕事
巨視的物体の温度はその物体に外部から仕事(work)をすることの他に、熱(heat)を与えること
によっても変化させることができる。歴史的に紆余曲折はあったが、現在では、熱とはエネルギーの一
形態であることがわかっており、熱量はエネルギーと同じ単位(Joule)で測定される。
内部エネルギー
後述するように、巨視的物体は全体としての運動エネルギーとポテンシャルエネルギーの他
に、内部エネルギーと呼ばれるエネルギーを持つ。全体として静止している物体に外部から仕事をした
り、熱を与えたりすることは、その物体の内部エネルギーを増加させることになる。
1
等温過程
熱力学的過程の前後で対象となる物体の温度が変化しない場合、その過程を等温過程(equithermal
process)と呼ぶ。
断熱過程
熱力学的過程の間、一貫して熱の出入りがない過程を断熱過程(adiabatic process)と呼ぶ。
準静的過程 熱力学的過程における状態変化がすべて熱平衡状態を経由する場合、その過程を準静的過程
qs
(quasi-static process)と呼ぶ。準静的過程は逆行可能である。つまり、ある準静的過程 A −→ B にお
qs
qs
qs
いて外部からの仕事 W (A −→ B) と熱 Q(A −→ B) が必要であるなら、逆の準静的過程 B −→ A に
qs
qs
おいて必要な外部からの仕事 W (B −→ A) と熱 Q(B −→ A) について、
qs
qs
W (B −→ A) = −W (A −→ B)
qs
qs
Q(B −→ A) = −Q(A −→ B)
(1)
(2)
が成立する。
2 熱力学の第 1 法則
ある熱力学的過程 A → B を考えよう。状態変化の原因は外部からの仕事かあるいは熱である。一般に、初
めの状態 A と終りの状態 B を決めたとしてもその途中に通る過程は様々であろう。したがって、この過程変
化に要する外部からの仕事 W (A → B) と熱 Q(A → B) は、途中経由する全ての状態に依存することになり、
状態量ではない。
ところが、今まで行なわれた全ての実験においては、どのような途中経過を経たとしても、その始状態と終
状態が同じであれば、W (A → B) + Q(A → B) は全て等しくなっている。従って、
def
Φ(A, B) = W (A → B) + Q(A → B)
(3)
という物理量を定義すれば、この Φ(A, B) は途中の状態に依存しない物理量であり、適当な過程を決めて計
qs
算してもよい。始状態 A から終状態 B に至る、ある準静的過程 A −→ B を考えよう。(これは、準静的過程
でありさえすればよい。)このとき、準静的過程の逆行可能性によって
qs
qs
Φ(B, A) = W (B −→ A) + Q(B −→ A)
qs
qs
= −W (A −→ B) − Q(A −→ B)
= −Φ(A, B)
(4)
が成立する。また、途中に A0 という状態を経由して、A から B に移ると考えると、
Φ(A, B) = W (A → A0 → B) + Q(A → A0 → B)
= W (A → A0 ) + W (A0 → B) + Q(A → A0 ) + Q(A0 → B)
= W (A → A0 ) + Q(A → A0 ) + W (A0 → B) + Q(A0 → B)
= Φ(A, A0 ) + Φ(A0 , B)
= Φ(A0 , B) − Φ(A0 , A)
(5)
が成立する。得られた結果については、過程の種類に依存しないことに注意しよう。そこで、何でも良いが、
ある「基準状態」A0 を決めておき、*1
def
U (A) = Φ(A0 , A)
*1
実は、内部エネルギーについてはその変化量のみが関係式に登場するため、この基準状態をどう決めるかは重要ではない。
2
(6)
と定義しておけば、任意の 2 状態 A、B について、
Φ(A, B) = Φ(A0 , B) − Φ(A0 , A)
= U (B) − U (A)
(7)
と、2 状態の状態量の差で書けることになる。この新しい U (A) を内部エネルギーと呼ぶ。この内部エネル
ギーを用いれば、経験則 (3) は
U (B) − U (A) = W (A → B) + Q(A → B)
(8)
となる。これを「熱力学の第 1 法則」と呼ぶ。
3 熱力学の第 2 法則-熱機関・カルノーエンジン・エントロピー
「熱力学の第 1 法則」は結局のところ「熱はエネルギー移動の一形態である」ということを物理的に表現し
たものであり、エネルギー保存則と同等である。この結果、熱機関において「動作させるのに必要な外部から
のエネルギー供給量よりも多くの仕事を外部にしてくれる熱機関」である第 1 種永久機関が不可能であること
がはっきりと示された。しかし、第 1 法則だけでは、「単一の熱源から熱を取り込み、それをすべて外部に為
す仕事に変換する」という熱機関の存在は否定されない。これを第 2 種永久機関という。
第 2 種永久機関を求めて、さまざまな研究が行なわれたが、そのいずれもが失敗し、現在に至るまで得られ
ていない。そこで、経験則として、第 2 種永久機関の作成は不可能である、ということが徐々に認められるよ
うになってきた。
1824 年、フランスの物理学者カルノー(Nicolas-L´eonard-Sadi Carno)は、蒸気機関の熱効率の研究を行
ない、第 2 種永久機関が不可能であるという前提を認めるならば、二つの熱源の間で作動するあらゆる熱機
関の熱効率は真に 1 より小さいある上限値を持ち(つまり、熱効率は決して 1 になることはなく)、しかも、
その上限値は二つの熱源の温度によってのみ決まるということを、天才的な議論によって示した。
このカルノーの議論は、さらにクラウジウスやケルビンによって、より精密になり、ついに、19 世紀半ば、
「等温サイクル過程によって外部に正の仕事を為すことはできない」というケルビンの原理にまとめられるこ
とになった。これが熱力学の第 2 法則である。*2 この原理は純粋な経験則であり、微視的な観点からの厳密な
証明は現在でも存在しない。
3.1 熱機関
熱機関 (thermal engine) とは、ある熱源から取りだした熱エネルギーを力学的仕事に変換する装置のこと
である。通常、熱機関を動かすと熱くなるため動かし続けるためには、冷やさなければならない。つまり、通
常の熱機関は高温 (TH ) の熱源と低温 (TL ) の熱源の間で動作する。これを 2 温度機関と呼ぶ。2 温度機関を
次のようにモデル化しよう。2 つの熱源の間にある作業物質 E を入れ、この作業物質を通して、熱の出し入れ
を行ったり、力学的仕事を取りだしたりする。熱機関が繰り返し動作するために、この作業物質 E はサイク
ル過程を行うものとする。サイクル過程とはある熱平衡状態から出発して、さまざまな状態変化を経た後に、
結局初めの状態に戻ってくるような過程のことである。このサイクル過程において、高温熱源 (TH ) から受け
取った熱量を QH 、低温熱源 (TL ) へ捨てた熱量を QL とし、その結果、外部に力学的仕事 w を取りだすこと
*2
これと同等の原理として、クラウジウスの原理「吸収した熱をすべて外部への仕事として変換する熱機関は存在しない」もある。
3
ができたとする。サイクル過程では、結局のところ内部エネルギー U (T, V ) は変化しないので、熱力学第 1 法
則より 0 = (QH − QL ) − w、すなわち
w = QH − QL
(9)
が成立する。
3.2 熱効率
熱機関の熱効率 (thermal efficiency) は高温熱源から取りだした熱量のうちのどれだけが力学的仕事として
取りだされたかを表わすもので、
η :=
QH − QL
QL
w
=
=1−
QH
QH
QH
(10)
で定義される。明らかに QH > 0(高温熱源から正味の熱エネルギーを取りださなければならない)であり、
また熱機関として役に立つためには w > 0 (外部に正の力学的仕事を取りださなければならない)であるか
ら、η > 0 となる。また、QL ≥ 0 より QL /QH ≥ 0 であるから、η ≤ 1 である。まとめると、
0<η≤1
(11)
である。
3.3 第 2 種永久機関
前節から、最も効率の良い熱機関は、η = 1、すなわち、QL = 0(低温熱源に熱を捨てる必要がない)であ
るような熱機関である。低温熱源は必要ないのだから、実際上、一つの熱源があれば動作することになる。こ
の熱機関はあるひとつの熱源から取りだした熱エネルギーをすべて力学的仕事に変換するものであり、第 2 種
永久機関と呼ばれる。
3.4 熱力学第 2 法則
あらゆる努力の甲斐もなく、第 2 種永久機関を作ることは現在もできていない。そこで、この事実を受け入
れ、熱力学第 2 法則としてつぎのようにまとめておく。
■熱力学第 2 法則
単一の熱源から熱を吸収する熱機関において、作業物質が外部に正の力学的仕事を行うこ
とはできない。
これはあらゆる熱機関は低温の熱源に必ず熱を捨てなければならないこと、すなわち、QL > 0 であること
を意味し、熱機関の熱効率はかならず 1 より真に小さいことを意味する。
0<η<1
(12)
3.5 カルノー機関
熱力学第 2 法則により高温の熱源から取り込んだ熱量 QH をすべて力学的仕事に変換することはできない。
そうなると、QH をどの程度まで力学的仕事に変換できるのかが新しい課題になる。すなわち「最も効率良く
熱を取り込みそれを最大限力学的エネルギーに変換できる熱機関はどのようなものか」という課題である。こ
4
の問題は 1824 年カルノー (Nicolas-L´
eonard-Sadi Carnot: 1796–1832) によって提起され解答が与えられた。
カルノーの考案した最も効率の良い熱機関をカルノー機関と呼ぶ。カルノー機関を学ぶための準備をしてお
こう。
3.5.1 準静的過程
カルノー機関を理解する鍵は準静的過程の可逆性である。準静的過程 (quasi-static) とは状態変化の途
中においても熱平衡状態が保たれるようなじゅうぶんにゆっくりとした過程変化のことである。従って過
程変化を完全に逆転することによって、すなわち、始状態と終状態を入れ替え、過程変化に伴う熱の移動
qs
の向きを変え、力学的仕事の符号を変えることによって、ある準静的過程 (T0 , V0 ) −→ (T1 , V1 ) の逆過程
qs
(T1 , V1 ) −→ (T0 , V0 ) が可能である。
3.5.2 不可逆過程
熱平衡状態遷移過程の中には、ある方向の変化は容易だが、逆方向の変化は非常に困難で事実上不可能であ
るという過程も存在する。例えば、コーヒーにミルクを入れてかき混ぜるのは簡単だが、完全に混ざり合って
いるコーヒーとミルクを分離するのは非常に困難である。このように、ある方向の変化は容易だが、その逆方
向の変化は事実上不可能であるような過程を不可逆過程と呼ぶ。不可逆過程においては、一般に過程変化の途
中において非平衡状態を経由する。
3.5.3 最大仕事の原理
始状態 (T0 , V0 ) と終状態 (T1 , V1 ) が同じでも、途中の過程変化が異なれば、それに伴う熱の移動や外部に為
す仕事量もまた異なるであろう。このとき、過程変化が準静的に行われるときに外部に為す仕事量が最大にな
ることを次のように示すことができる。
始状態 (T0 , V0 ) から終状態 (T1 , V1 ) へのある過程変化に伴って気体が外部に為す仕事の大きさを w とし、
同じ始状態から終状態への変化が準静的に行われるときに外部に為す仕事を wqs とする。ここで、準静的変化
qs
は可逆過程であるから、外部から −wqs の仕事を加えることによって、準静的変化 (T1 , V1 ) −→ (T0 , V0 ) を実
現することができることに注意しよう。もし、w > wqs であったと仮定してみる。このとき、サイクル過程
qs
(T0 , V0 ) −→ (T1 , V1 ) −→ (T0 , V0 )
について、気体が外部に為す仕事は
w − wqs > 0
である。ところが、これでは気体がサイクル過程を行ない始めの状態に戻ったとき、正の仕事が外部に為され
ることになり、熱力学第 2 法則を破ることになってしまう。従って、w ≤ wqs でなければならない。
■最大仕事の原理
過程変化に伴って気体が外部に為す仕事は、準静的過程において最大になる。
3.5.4 カルノー機関
高温熱源から受け取った熱量を最大限に活用し、外部に仕事をなす機関(カルノー機関)がどのようなもの
か考察してみよう。前節から、最大の仕事を取りだすためには、あらゆる過程変化を準静的に行わなければな
らないことがわかる。その過程変化をいくつかのプロセスに分けて見てみよう。
1. 高温熱源(TH )からの吸熱(始状態 (TH , V1 ))
5
まず、作業物質は高温熱源から熱 QH をもらわなければならない。吸熱は準静的に行われる。すなわ
ち、作業物質と熱源とを合わせた系が熱平衡状態にあるのだから、この過程は温度 TH の等温準静的過
程である。始状態における作業物質の体積を V1 とすると、この過程変化は
iqs
(TH , V1 ) −→ (TH , V2 )
となる。吸熱の結果、体積は V1 から V2 に膨張し、外部に仕事を為すことになる。この場合、V2 は任
意に決めてよい。
2. 低温熱源(TL )と同じ温度にするための断熱膨張(始状態 (TH , V2 ))
熱力学第 2 法則より必ず温度 TL (< TH ) の熱源に熱を捨てなければならないが、温度が TH のままでは
無駄な熱量を放出することになる。従って、外部との熱の出入りを断って、気体を温度 TL にしなけれ
ばならない。そのために、準静的な断熱膨張 V2 → V3 を行って、気体の温度を TH から TL に下げる。
aqs
(TH , V2 ) −→ (TL , V3 )
この場合の V3 は断熱曲線から決まる。
3. 低温熱源(TL )への放熱(始状態 (TL , V3 ))
温度 TL の等温環境で低温熱源に熱 QL を放出する。その結果、気体の体積は小さくなり、V3 → V4 と
なる。
iqs
(TL , V3 ) −→ (TH , V4 )
この V4 は、次の断熱圧縮過程で一番始めの (TH , V1 ) に戻るという条件から決まる。
4. 高温熱源(TH )と同じ温度にするための断熱圧縮(始状態 (TL , V4 ))
始状態に戻るために、熱の出入りを断って、気体を断熱圧縮し温度を TH に上げる。
aqs
(TL , V4 ) −→ (TH , V1 )
これで、サイクル過程が終了し、一番始めの状態 (TH , V1 ) に戻ったことになる。この過程でカルノー
機関が外部になした仕事を w としよう。作業物質は完全に元の状態に戻ったのだから、熱力学第 1 法
則から 0 = QH − QL − w、すなわち、w = QH − QL である。
このように温度 TH と TL の熱源の間で作動し、体積変化
iqs
aqs
iqs
aqs
V1 −→ V2 −→ V3 −→ V4 −→ V1
を経由する準静的熱機関がカルノー機関である。用いる気体の種類を A として、このカルノー機関を
CA [TH , TL ; V1 , V2 , V3 , V4 ] と表わすことにしよう。
3.5.5 カルノー機関の熱効率
熱効率の一般的な定義は、高温熱源から吸収した熱を QH 、低温熱源に放出した熱を QL として、
η =1−
QL
QH
であった。
あるカルノー機関 CA [TH , TL ; V1 , V2 , V3 , V4 ] の熱効率を考えよう。熱の吸収は等温膨張過程
iqs
(TH , V1 ) −→ (TH , V2 )
6
(13)
で行われ、熱の放出は等温圧縮過程
iqs
(TL , V3 ) −→ (TL , V4 )
で行われる。吸収あるいは放出される熱は当然作業物質として用いた気体 A の熱容量にも依存するはずであ
るから QH は TH , V1 , V2 , A に、また、QL は TL , V3 , V4 , A に依存するはずである。従って、この依存関係を
明確に書けば、
iqs
QH = QH [TH ; V1 −→ V2 ; A]
(14)
iqs
QL = QL [TL ; V3 −→ V4 ; A]
(15)
となる。このため、このカルノー機関 CA [TH , TL ; V1 , V2 , V3 , V4 ] の熱効率 ηC は A, TH , TL , V1 , V2 , V3 , V4 の
すべての変数に依存することになる。しかし、カルノーは注意深い考察によって、次のような驚くべき結果を
導きだした。
■カルノー機関の熱効率の最大性および普遍性(カルノーの定理)
温度 TH の高温熱源と温度 TL の低温熱
源の間で作動するあらゆる熱機関の中で、カルノー機関の熱効率が最大である。また、このカルノー機関の熱
効率は作業物質として用いる気体 A の種類や、経由する体積変化 V1 → V2 → V3 → V4 には全く依存せず、
ただ、二つの熱源の温度 TH と TL にのみ依存する。
最大性については、準静的過程の最大仕事の原理から納得できるであろうが、驚くべきはその普遍性であ
る。高温熱源と低温熱源の温度を決めてしまえば、どんな気体を使って、どんな体積変化の経路をたどるカル
ノー機関を作っても、その熱効率は全て同じだというのである。
3.5.6 カルノーの定理の証明
証明の鍵はカルノー機関の可逆性である。カルノー機関は準静的過程のみから構成されているため、
その動作を完全に逆転することが可能である。すなわち、低温熱源から QL の熱量を吸収し、外部から
w の大きさの仕事をされることによって、高温熱源に QH の熱を戻すことができる。あるカルノー機関
−1
CA [TH , TL ; V1 , V2 , V3 , V4 ] の逆の動作をするカルノー機関を CA
[TH , TL ; V1 , V2 , V3 , V4 ] で表わそう。カル
ノー機関の可逆性および熱力学第 2 法則より、次のようにカルノーの定理は証明できる。
高温熱源 TH と低温熱源 TL の間で作動する二つの熱機関 CA [TH , TL ; V1 , V2 , V3 , V4 ] と CA′ [TH , TL ; V1′ , V2′ , V3′ , V4′ ]
を考える。熱効率をそれぞれ ηC 、および ηC′ とする。この二つのカルノー機関は、高温熱源から吸収する熱
量 QH が同じになるように調整されているものとする。*3 まず、ηC < ηC′ と仮定しよう。これを CA が外部に
為す仕事 w と、CA′ が外部に為す仕事 w′ で表わすと、
ηC < ηC′ ⇔
w
w′
<
⇔ w < w′
QH
QH
(16)
を意味する。すなわち、同じ熱 QH を受け取っても CA′ の方が多くの仕事をする。また、CA と CA′ が低温
熱源に放出する熱量をそれぞれ QL , Q′L とすると第 1 法則より
QL = QH − w, Q′L = QH − w′
*3
このために、一方の作業物質の量を適当に調整する。この作業によって熱効率は変わらないので、議論の普遍性は影響を受けない。
なぜなら、物質が吸収したり放出したりする熱量は示量性を持つため、物質量を α 倍することにより、吸収する熱 QH 、放出する
熱 QL が、どちらも α 倍され、結局、熱効率は影響を受けないからである。
7
であるから、w < w ′ は QL > Q′L であること、すなわち、熱効率の小さなカルノー機関の方がより多くの熱
を低温熱源に放出しなければならないことを意味する。
−1
ここで、熱効率の小さなカルノー機関 CA の動作を逆転させた CA
を考えよう。この逆カルノー機関は低
温熱源から熱 QL を吸収するとともに、外部から仕事 w をされることによって高温熱源に熱 QH を戻すこと
ができる。今、w < w′ であるから、効率の良いカルノー機関 CA′ が外部に為す仕事 w′ のうち w を逆カル
−1
−1
ノー機関 CA
の動作に用いれば、CA′ が高温熱源から吸収した熱 QH は逆カルノー機関 CA
によって完全
−1
に返却されることになる。二つのカルノー機関 CA′ と CA
を合わせた熱機関は結局温度 TL の単一の熱源か
ら熱 QL − Q′l (> 0) を吸収するだけで、外部に w′ − w(> 0) の仕事をすることができることになる。これは
熱力学第 2 法則を破っている。この矛盾は仮定 ηC < ηC ′ から生じたのであるから、ηC ≥ ηC ′ でなければな
らない。ここまでの議論で CA′ の可逆性は用いていないので、この結論は CA′ がどんな熱機関であっても成
立する。従って、温度 TH と TL の間で作動する熱機関のうちでカルノー機関の熱効率 ηC が最大である。
次に、CA′ もカルノー機関であるときには、CA と CA′ の役割を入れ替えて全く同じ議論をすれば ηC ≤ ηC ′
でなければならないことが示せるので、結局、ηC = ηC ′ でなければならない。すなわち、温度 TH と TL の間
で作動する全てのカルノー機関の熱効率は同じである。(証明終わり)
このカルノー機関の熱効率の普遍性は真に驚くべき結果である。どのような作業物質を持ってきて、どのよ
うな作動原理を用いようとも、二つの熱源 TH と TL の間で作動し、準静的過程のみを含む熱機関は全て同じ
熱効率
ηC = 1 −
QL (低温熱源 TL へ等温順静的過程で放出する熱量)
QH (高温熱源 TH から等温準静的過程で吸収する熱量)
(17)
を持つのである。
4 絶対温度
4.1 「絶対でない温度」
ここで、カルノー機関の議論に用いられた熱源の温度とは何かをとらえなおしておこう。この温度は何らか
の温度計を用いて測定された経験上の温度であろう。この節では経験上の温度を「温度」と鍵カッコつきで表
現することにする。「温度」はふつう温度計で測定される。温度計は、細い管に水銀やアルコールを封入し、
温度変化によるそれらの物質の体積変化をもって温度の値とするものである。しかし、この温度計で測られる
「温度」は次のような欠点を持っている。
• 実際は温度を測っているのではなく、ある熱平衡状態での温度計構成物質の体積を測っている。
• 実際の物質はある温度以下では凝固し、またある温度以上では気化するなど、その性質を様々に変える
ため温度計が測定できる温度範囲は、温度計にどのような物質を用いるかによって変わる。
• 温度計に用いる物質を変えるたびに、目盛りの換算を行わなければならない。
このように「温度」は、温度計を構成する物質の性質と深く結びついており、温度計に基づいた「温度」の定
義はどうしても一般的なものとはなりえないのである。
8
4.2 絶対温度 = 温度計を必要としない温度
ところが、カルノーの考察により、二つの熱源の「温度」TH と TL にのみ依存して、構成物質にはまった
く依存しない物理量が存在することがわかった。すなわち、この熱源の間で作動するどんなカルノー機関も同
じ熱効率
ηC = 1 −
Qiqs
L (TL )
(18)
Qiqs
H (TH )
を持つというのである。ここで、あるカルノー機関が高温熱源 TH から等温準静的過程で吸収する熱を
iqs
Qiqs
H (TH )、低温熱源 TL に等温準静的過程で放出する熱を QL (TL ) と書いた。また、カルノーの定理は同じ
温度間で作動するあらゆるカルノー機関について熱量比
Qiqs
L (TL )
(19)
Qiqs
H (TH )
が等しくなることを意味することに注意しよう。このことを利用すれば、どのような作業物質を用いて測定し
ても目盛りの換算をすることなく同じ値を与える絶対温度 (absolute temperature) を次のようにして定義す
ることができる。なお、絶対温度の単位は K (Kelvin) である。
1. まず、絶対温度の基準点を定めなければならない。任意の物質の任意の熱平衡状態を基準点として良い
が、いったん決めればもう動かしてはならない。この基準点の絶対温度を Θ∗ としよう。
2. 次にこの Θ∗ よりも高温である熱源の絶対温度を次のように定義する。
iqs
高温熱源と絶対温度 Θ∗ の熱源の間で任意のカルノー機関を作動させ、高温熱源から吸収される熱 QH
iqs
と絶対温度 Θ∗ の熱源に放出する Q∗ を測定し、熱量の比
Qiqs
H
Qiqs
∗
(> 0)
(20)
を決定する。この比は、どのカルノー機関を用いて測定しても同じ値になることが重要である。高温熱
源の絶対温度 Θ は
Θ=
Qiqs
H
Qiqs
∗
Θ∗
(21)
であると決める。
3. 基準温度 Θ∗ よりも低温である熱源の絶対温度については Θ∗ と低温熱源の間で任意のカルノー機関を
iqs
iqs
作動させ、基準温度熱源から吸収される熱 Q∗ と低温熱源に放出する熱 QL を測定し、熱量の比
Qiqs
L
Qiqs
∗
を決定する。低温熱源の絶対温度 Θ は
Θ=
(< 0)
Qiqs
∗
Qiqs
L
Θ∗
(22)
(23)
であると決める。
このようにして定義された絶対温度は、特定の物質の熱力学的性質には全く依存せずに決まっていることを重
ねて強調しておこう。
9
絶対温度 ΘH と絶対温度 ΘL の熱源(ただし ΘH > ΘL )の間で作動するカルノー機関が ΘH から吸収する
熱を QH 、ΘL へ放出する熱を QL とすると、この絶対温度の定義によれば、
QL
ΘL
=
QH
ΘH
であり、熱効率は
ηC = 1 −
ΘL
ΘH
(24)
(25)
となる。この証明については読者に委ねよう。
*4
なお、国際規約では、水の三重点の絶対温度を 273.16[K] とする基準が用いられている。
5 熱力学的ポテンシャル
熱力学の第 1 法則と熱力学の第 2 法則を組み合わせると何が出てくるだろうか?無限小の違いのある二つの
状態 A と A′ を考えよう。二つの状態の温度(以降、温度はすべて絶対温度である。)は等しく T と考えてよ
いものとする。このとき、この過程で吸収される熱 ∆Q(A → A′ ) は、エントロピー変化を用いて、
∆Q(A → A′ ) = T ∆S(A → A′ )
(26)
と書くことができる。さらに考えやすくするため、対象とする物体は理想気体に限定しよう。A から A′ への
状態変化によって、体積が ∆V (A → A′ ) だけ変化したとする。気体は、体積変化をしたときのみ外部に(ま
た外部から)力学的な仕事を行ない、今の場合、その仕事量は
∆W (A → A′ ) = −P ∆V (A → A′ )
(27)
である。ここで、状態変化は微小であるため、系の圧力 P は一定と見なせるとした。
以上より、熱力学の第 1 法則は
∆U (A → A′ ) = −P ∆V (A → A′ ) + T ∆S(A → A′ )
(28)
となる。ここで ∆ がついている量は全て状態量の変化であるから、両辺に過程依存量は含まれていないこと
に注意しよう。(唯一の仮定は、A と A′ が微小状態変化であるということである。)そこで、この関係式を、
完全微分を用いて、
dU = −P dV + T dS
(29)
と表わしてよいことになる。これは、内部エネルギーが体積 V とエントロピー S という二つの状態量の関
数であることを示しており、もし内部エネルギーが V と S にどのように依存するかがわかれば(すなわち、
U (V, S) の関数形がわかれば)、圧力 P と、その状態での気体の温度 T は
)
(
)
(
∂U
∂U
, T =
P =−
∂V S
∂S V
(30)
により求めることができる。
このように、二つの状態量の関数として表され、その偏微分係数によって、他の状態量が計算できるエネル
ギー量を熱力学的ポテンシャルと呼ぶ。内部エネルギーは V と S の関数として表わしたとき、熱力学的ポテ
ンシャルとなる。
*4
この基準は摂氏 0 度を 273.15[K] と決めることにほぼ等しい。
10
熱力学的ポテンシャルとして用いられるものは他にもある。関数の独立変数としてエントロピー S を用い
るのは、熱力学の理論的な考察の場合には便利であるが、実際の計算には温度 T を用いた方がよい。そこで、
独立変数を (V, S) の組から (V, T ) の組に変更しよう。そのために、数学においてルジャンドル変化と呼ばれ
る変換を行ない、
def
F = U (V, S) − T S
(31)
と定義しよう。この F については、
dF = dU − d(T S)
= −P dV + T dS − T dS − SdT
= −P dV − SdT
(32)
であるから、確かに独立変数が (V, T ) に変っており、
(
P =−
∂F
∂V
)
(
, S=−
T
∂F
∂T
)
(33)
V
によって、他の状態量を求めることができる。この F (V, T ) をヘルムホルツの自由エネルギーと呼ぶ。
def
その他の熱力学的ポテンシャルとしてエンタルピー H(P, S) = U + P V 、ギブスの自由エネルギー
def
G(P, T ) = F + P V = U − T S + P V がある。
11
第 II 部
数学的準備
6 確率・統計
6.1 離散分布
飛び飛びの値をとる確率変数 Xi (i = 1, 2, . . .) とその確率分布 P (Xi ) について、次のことが成立する。
1.
0 ≤ P (Xi ) ≤ 1
2. 規格化条件
∑
P (Xi ) = 1
i
3. 平均
⟨X⟩ =
∑
Xi P (Xi )
i
同様に、確率変数の関数 f (X) の平均値は
⟨f (X)⟩ =
∑
f (Xi ) P (Xi )
i
となる。
4. 分散
∑
(
)
¯ 2 P (Xi ) = X 2 − X 2
¯ 2⟩ =
(Xi − X)
⟨ X −X
i
分散の平方根は標準偏差と呼ばれ、確率変数がどの程度、その平均値からはずれるかの目安となる。
6.2 連続分布
実数値をとる確率変数 x (−∞ ≤ x ≤ ∞) とその確率密度関数 p(x) について、次のことが成立する。
1.
0 ≤ p(x) ≤ 1
2. 規格化条件
∫
∞
p(x) dx = 1
−∞
3. 平均
∫
⟨x⟩ =
∞
x p(x) dx
−∞
同様に、確率変数 x の関数 f (x) の平均については
∫
⟨f (x)⟩ =
∞
f (x) p(x) dx
−∞
が成立する。
12
4. 分散
∫
∞
2
⟨(x − x
¯) ⟩ =
−∞
2
(x − x
¯) p(x) dx
7 ガウス積分
物理学で用いられる数学のなかで非常に重要なものとして、ガウス積分
∫
∞
√
π
(34)
tz−1 e−t dt
(35)
e−u =
2
−∞
がある。これは以下では既知とする。
8 ガンマ関数・スターリングの公式
8.1 ガンマ関数
∫
ガンマ関数は
∞
Γ(z) =
0
で定義される関数であり、以下に述べるように自然数 n の階乗 n! と深い関係があるため、統計物理学では非
常に重要である。
まず、ガンマ関数の最も重要な性質として
zΓ(z) = Γ(z + 1)
(36)
がつねに成立していることが挙げられる。これは以下のように示される。
)′
∫ ∞(
1 z
tz−1 e−t dt = z
t
· e−t dt
(37)
z
0
0
{[
}
{
} ∫ ∞
∫ ∞
∫
1 z −t ]∞
1 z ( −t )
1 ∞ z −t
=z
t e
−
t −e
dt = z 0 +
t e dt =
t(z+1)−1 e−t dt (38)
z
z
z
0
0
0
0
= Γ(z + 1)
(39)
∫
∞
zΓ(z) = z
ここで、式 (37) から (38) は部分積分を用い、式 (38) から (39) はもちろん定義式 (35) を用いた。
次に z = 1 での関数の値は、
∫
Γ(1) =
0
∞
t0 e−t dt =
∫
∞
]∞
[
e−t dt = − e−t
=1
0
である。
従って、
Γ(1) = 1
Γ(2) = 1 · Γ(1) = 1 = 1!
Γ(3) = 2 · Γ(2) = 2 × 1 = 2 = 2!
Γ(4) = 3 · Γ(3) = 3 × 2 × 1 = 6 = 3!
..
.
13
0
(40)
であるから、n が自然数のとき、n! = Γ(n + 1) であることがわかる。また、この関係式から 0! = Γ(1) = 1
と決めるのが自然であることもわかる。
この、n の階乗とガンマ関数の関係を用い、n が非常に大きいときに成立するスターリングの式を次節のよ
うに導くことができる。
8.2 スターリングの式
統計物理学では N を系の構成粒子数として、ln N ! を含む関係式が非常に多く得られる。一般にこの N は
アボガドロ数 6 × 1023 の程度であり、莫大な数である。この場合には実質上 ln N ! ≈ N ln N − N が成立し、
ln N ! は N に比例する因子を持つ。この近似式がスターリングの式であり、統計物理学において、非常によく
使われる近似式である。これは以下のようにして求められる。
∫
まず、
n! = Γ(n + 1) =
∞
∫
n −t
t e dt =
0
∞
e
n ln t −t
∫
∞
e dt =
0
en ln t−t dt
(41)
0
であるが、積分変数 t が 0 から ∞ まで変化する間に、指数 n ln t − t は −∞ から正のある値まで増加し、最
大となった後、また ∞ まで減少する。今、n が非常に大きい場合を考えると、この指数の最大値は n に比例
する値であり、やはり非常に大きくなる。従って、この積分の結果は、この指数の最大値を中心とした、非常
に狭い積分区間の積分によってほとんど決まってしまう。この考え方(積分の漸近評価という)を用いて、ガ
ンマ関数の積分を次のように近似計算しよう。
指数 n ln t − t の最大値を与える t の値は
∂
n
(n ln t − t) = − 1 = 0
∂t
t
より、t = n となる。従って、指数の最大値は n ln n − n である。(実は、これだけで、もうスターリングの式
は得られているのであるが。)そこで、
∂2
n
(n ln t − t) = − 2
2
∂t
t
であることに注意して、指数を t = n のまわりで 2 次まででテーラー展開すると、
1( n)
2
n ln t − t ≈ (n ln n − n) +
− 2 (t − n)
2
n
1
2
= (n ln n − n) −
(t − n)
2n
となる。
従って、
∫
∞
n! = Γ(n + 1) =
en ln t−t dt
0
∫ ∞
[
]
1
2
≈
exp (n ln n − n) −
(t − n) dt
2n
0
∫ ∞
2
1
e− 2n (t−n) dt
= en ln n−n
0
√
となる。積分変数を u = (t − n)/ 2n に変換すると、
n! = Γ(n + 1)
√ ∫ ∞
2
≈ en ln n−n 2n √ e−u du
n
−
14
2
となる。次にこの積分の下限は n が非常に大きいことから、今の近似の範囲内では −∞ と考えてよく、そう
√
すれば、この積分はガウス積分となって、 π を与える。以上より、
√
√
n! ≈ en ln n−n 2πn = nn e−n 2πn
と近似されることになる。(この近似式をスターリングの式とする本もある。)
よって、
(
)
√
ln n! ≈ ln nn e−n 2πn
√
= ln nn + ln e−n + ln 2πn
1
= n ln n − n + ln(2πn)
2
1
1
= n ln n − n + ln n + ln(2π)
2
2
(
)
1
1
= n+
ln n − n + ln(2π)
2
2
≈ n ln n − n
(42)
最後の近似式 (42) がスターリングの式である。
9 n 次元球の体積 Vn (r) および表面積 Sn (r)
半径 r の n 次元球面とは、r が与えられたとき、n 個の変数 x1 , x2 , . . . , xn に対して、
x21 + x22 + · · · + x2n = r2
の関係式によって定まる n 次元ユークリッド空間内の面のことである。2 次元や 3 次元空間の場合にはよく
知っているように、
V2 (r) = πr2 , S2 (r) = 2πr,
4
V3 (r) = πr3 , S3 (r) = 4πr2
3
となる。
これらの形から予想されるように、常に
d
Vn (r) = Sn (r)
dr
が成立している。n 次元空間においては Vn (r) ∝ rn であるから、Vn (r) = Cn rn とおいて、係数 Cn を求める
ことにする。この Cn の求め方にはいろいろあるが、ここでは、次の方法を取る。
n 個の変数についての定積分
In =
∫
∫
∞
−∞
dx1
∫
∞
dx2 · · ·
−∞
∞
−∞
dxn e−a(x1 +x2 +···+xn )
2
2
2
を考えよう。複雑に見えるが、これは単に n 個のガウス積分の積になり、
∫
In =
∞
−∞
∞
(∫
=
=
dx1 e−ax1
2
dxe−ax
∫
2
∞
−∞
dx2 e−ax2 · · ·
2
)n
−∞
( π )n/2
∫
∞
−∞
dxn e−axn
2
(43)
a
15
と計算できる。
一方、この積分は n 次元空間における極座標を用いて計算することもできる。被積分関数は
e−a(x1 +x2 +···+xn ) = e−ar
2
2
2
2
であるから、原点からの距離 r にのみ依存する。従って、積分を行う場合、まず原点からの距離 r を一定に
保っておいた上で、全方向について積分をすることができ、これは半径 r の球面の表面積 Sn (r) = nCn rn−1
∫
となるから、
∞
dr e
In =
−ar 2
∫
nCn r
n−1
∞
= nCn
0
dr rn−1 e−ar
2
0
√
となる。ここで積分変数を u = ax に変更すると、
In = nCn a
−n/2
∫
∞
du un−1 e−u
2
0
であり、さらに、ξ = u2 に積分変数を変更すると、
In = nCn a
−n/2 1
∫
2
∞
dξ ξ 2 −1 e−ξ
n
0
となる。
最後の式の中の積分はガンマ関数の定義式 (35) から Γ(n/2) であるから、結局
1 (n)
In = nCn a−n/2 Γ
2
2
(44)
であることになる。
二通りの方法で計算した In の結果 (43) と (44) を比較して、
Cn =
π n/2
π n/2
(
)
(
)
=
n
n
Γ n2 + 1
2Γ 2
を得ることができる。最後の変形にはガンマ関数の性質 zΓ(z) = Γ(z + 1) を用いた。
以上により、n 次元空間における半径 r の球面の囲む体積 Vn (r) および表面積 Sn (r) は、この Cn を用い、
Vn (r) = Cn rn , Sn (r) = nCn rn−1
と計算されることになる。
この式が n = 2 と n = 3 の場合に、よく知っている結果になるかどうかは、練習問題としておこう。
16
第 III 部
統計物理学
10 小正準分布における理想気体の状態方程式の導出
小正準分布は他の系とエネルギーの交換をしない、閉じた系の計算に用いられる。この分布において最も重
要な関係式は、エントロピー S と状態数 W の関係式
S = kB ln W
である。このエントロピーは系の全エネルギー E および体積 V の関数として計算される。
エントロピー S(E, V ) が計算されれば、熱力学的関係式
dE = T dS − P dV
を逆に解いた関係式、
P
1
dE + dV
T
T
dS =
から、
1
=
T
(
∂S
∂E
)
,
V
P
=
T
(
∂S
∂V
)
E
を用いて、状態方程式を計算することができる。
さて、この小正準分布を用いて、理想気体の状態方程式
P V = N kB T
を導出してみよう。
統計物理学における理想気体とは、N 個の内部自由度を持たない自由粒子が一辺が L の立方体(体積は
3
L = V )の中に閉じ込められたものである。自由粒子の集合体であるから、全系のエネルギーは単に個々の
粒子の運動エネルギーの総和となる。粒子どうしの衝突は完全弾性衝突であるとし、衝突によって全系の運動
エネルギーは変化しない。
小正準分布において、まず行わなければならないのは、状態数 W の計算である。統計物理学では、運動量
dpdq
につき一つの状態があると数えればよいことがわかっ
2πℏ
ている。ここで、ℏ はプランク定数である。一辺の長さが L の立方体の中に、N 個の同種粒子(質量 m)か
p と位置 q の 1 つの自由度がある場合、微小領域
らなる気体が閉じ込められているとしよう。粒子ひとつにつき 3 つの自由度があるから、全体で 3N の自由度
があることになる。このような孤立系では気体全体の持つエネルギー
p21
p2
p2
+ 2 + ··· + n
2m 2m
2m
˜
は一定である。従って。この条件下での気体の取り得る状態数 W は
∫
∫
∫
dp2 dq2
dp3N dq3N
dp1 dq1
˜ =
···
1
W
2πℏ
2πℏ
2πℏ
∫ L
∫ L
∫ L
∫
∫
∫
1
=
dq
dq
·
·
·
dq
dp
dp
·
·
·
dp3N 1
1
2
3N
1
2
(2πℏ)3N 0
0
0
∫
∫
∫
VN
=
dp
dp
·
·
·
dp3N 1
1
2
(2πℏ)3N
E=
17
ここで、気体は一辺 L の立方体内に閉じ込められていることから、qi における積分を実行し、さらに L3 = V
とおいた。もちろん V は気体の体積である。最後に、運動量 pi についての積分が残るが、これは全エネル
ギー E が一定であるという条件下で実行されなければならない。ところが、
E=
が一定なのだから、これは単に半径
√
p21
p2
p2
+ 2 + ··· + n
2m 2m
2m
2mE の 3N 次元球面の表面積を計算することと同じである。前節によ
り、この表面積は
√
√
S3N ( 2mE) = 3N · C3N · ( 2mE)3N −1 = 3N ·
π 3N/2
( 3N
) · (2mE)(3N −1)/2
Γ 2 +1
˜ は
であるから、運動量積分を実行した結果得られる状態数 W
˜ =
W
VN
π 3N/2
) · (2mE)(3N −1)/2
· 3N · ( 3N
3N
(2πℏ)
Γ 2 +1
˜ は N 個の同種粒子から構成される気体においては不十分であることが統
となる。ところが、この状態数 W
計力学の創始者 Gibbs によって指摘された。N 個の同種粒子から成る気体の状態数を数える場合には、その
˜ /N ! を状態数としなければならないのである。以上すべてま
N 個の粒子の識別不可能性を考慮して W = W
とめると、この気体の状態数は
W =
1
VN
π 3N/2
) · (2mE)(3N −1)/2
·
· 3N · ( 3N
3N
N ! (2πℏ)
Γ 2 +1
となる。
次に、ln W を計算しよう。この計算は繁雑であるが、系の粒子数 N がアボガドロ数程度の莫大な量である
ことを考慮して、N に比例する項のみ残すことにする。
まず、単純に対数を取れば、
ln W = − ln N ! + ln V N − ln(2πℏ)3N + ln π 3N/2 −
(
)
3N
ln Γ
+ 1 + ln(2mE)(3N −1)/2
2
3N
= − ln N ! + N ln V − 3N ln(2πℏ) +
ln π −
(
)2 (
)
3N
3N
1
ln Γ
+1 +
−
ln(2mE)
2
2
2
である。
ここで、N が莫大な数であることからスターリングの式 Γ(z + 1) = z! ≈ z ln z − z を用いて、
(
ln Γ
ln N ! ≈ N ln N − N
)
3N
3N
3N
3N
+1 ≈
ln
−
2
2
2
2
であるから、
3N
ln π −
ln W ≈ − (N ln N − N ) + N ln V − 3N ln(2πℏ) +
2 )
(
) (
3N
3N
3N
3N
1
ln
−
+
−
ln(2mE)
2
2
2
2
2
18
となる。
この中から N に比例する項のみを残す近似をすると
ln W ≈ −N ln N + N + N ln V − 3N ln(2πℏ) +
3N
ln π −
2
3N
3N
3N
3N
ln
+
+
ln(2mE)
2
2
2
2
3N
= −N ln N + N ln V − 3N ln(2πℏ) +
ln π −
2
3N
3N
3N
5N
ln
+
ln(2mE) +
2
2
2
2
3N
3N
3N
= −N ln N + N ln V −
ln
+
ln E −
2
2
2
3N
3N
5N
3N ln(2πℏ) +
ln π +
ln(2m) +
2
2
2
V
3N
2E
= N ln
+
ln
+
N
2
3N
{
}
3N
5
− ln(2πℏ)2 + ln π + ln(2m) +
2
3
{
}
V
3N
2E
3N
π · 2m
= N ln
+
ln
+
ln
+ ln e5/3
N
2
3N
2
(2πℏ)2
( 5/3 )
V
3N
2E
3N
me
= N ln
+
ln
+
ln
N
2
3N
2
2πℏ2
となる。
(項をこのようにまとめるには意味があるのだが、それはここでは述べない。)
従って、エントロピー S = kB ln W は
{
( 5/3 )}
V
3 2E
3
me
S = kB N ln
+ ln
+ ln
N
2 3N
2
2πℏ2
(45)
となる。
あとは、関係式
1
=
T
を用いて、
(
∂S
∂E
)
,
V
31
1
= kB N
,
T
2E
から
P
=
T
(
∂S
∂V
)
E
P
1
= kB N
T
V
2E
,
3N
(46)
P V = N kB T
(47)
kB T =
を得ることができる。第 1 の式は絶対温度 T をエネルギーに換算した値 kB T が粒子 1 個当りのエネルギー
E/N と関係していることを表わす式であり、第 2 の式が理想気体の状態方程式である。
‘v
19
第 IV 部
量子力学
11 Fundamental Physical Constants
まず,重要な物理定数を羅列しておく。計算に必要になった場合にはこれらを参照すること。
11.1 力学・熱力学・統計力学関係
万有引力定数
G = 6.674 × 10−11 [N·m2 /kg2 ]
重力加速度
g = 9.806[m/s2 ]
アヴォガドロ定数
NA = 6.022 × 1023 [mol−1 ]
ボルツマン定数
kB = 1.380 × 10−23 [J/k]
気体定数
R = NA kB = 8.314[J/mol·K]
熱の仕事当量
1[cal] = 4.186[J]
標準圧力
101325[Pa] = 760[mmHG] = 1[atm]
気体の標準体積
Vm = 2.241 × 10−2 [m3 /mol]
熱力学・統計物理学で用いる温度は絶対温度である。単位は [K](ケルビン Kelvin)である。絶対温度に
273.15 を加えると,我々が通常よく用いるセルシウス温度(摂氏温度,[◦ C])となる。アメリカ合衆国では温
度としてファーレンハイト温度(華氏温度,[◦ F])を用いている。摂氏温度 C と華氏温度 F の換算は
F =
9
C + 32,
5
C=
5
(F − 32)
9
で行う。
11.2 電磁気学関係
光速度
c = 2.99792458 × 108 [m/s] (定義)
真空の透磁率
µ0 = 4π × 10−7 = 1.256 × 10−16 [N/A]
真空の誘電率
ϵ0 = (4π)−1 c−2 × 107 = 8.854 × 10−12 [F/m]
素電荷
e = 1.602 × 10−19 [C]
光(可視光)も電磁波である。電磁波の波長を λ[m],振動数を ν[s−1 ] とすると c = λν の関係がある。目
に見える光(可視光)の波長は赤が 0.77[µm] から紫の 0.38[µm] までである。赤よりも波長の長い光は赤外線
(infra-red)
,紫よりも波長の短い光は紫外線(ultra-violet)と呼ばれる。
20
11.3 量子力学関係
プランク定数
h = 6.626 × 10−34 [J·s]
プランク定数
ℏ = h/2π = 1.054 × 10−34 [J·s]
電子の質量
me = 9.109 × 10−31 [kg]
陽子の質量
mp = 1.672 × 10−27 [kg]
中性子の質量
mn = 1.674 × 10−27 [kg]
12 「波」の式の基本
素朴な感覚における「波」とは、ある時刻 t = 0 における「波形」f0 (x) が、その形を変えずに、時間ととも
にその位置を変えて進行していく現象である。ここでは、簡単のため、1 次元における波のみ考える。波の速
さを v とすると、一般の時刻 t における波形は、時刻 t = 0 における波形 f0 (x) を波の進行方向に応じて、正
方向あるいは負方向に波の進行する距離 vt だけ平行移動したものであるから、
f (x, t) = f0 (x ± vt)
となる。以降、これも簡単のため、f0 を単に f と書くことにする。
最も、簡単な波は、振幅が一定で、単位時間当りに決まった回数だけ振動する正弦波であろう。正弦波にお
いて、波が 1 回振動するのに必要な長さを波長(wave length)と呼び、λ で表わす。また、波が 1 回振動する
のに必要な時間を周期(period)と呼び、T で表わす。その逆数は波が単位時間当りに振動する回数であり、
振動数(frequency)と呼ばれ、ν で表わす。従って、v 、λ、ν の間には、次の関係が成り立つ。
v = λν
正弦波は三角関数を用いて次のように表わすことができる。
[ (
)
]
x
t
f (x, t) = A sin 2π
−
+ θ0
λ T
(
)
2π
2π
= A sin
x−
t + θ0
λ
T
ここで、A は波の振幅(amplitude)であり、三角関数の角度を表わす部分、
2π
2π
x−
t + θ0
λ
T
は波の位相(phase)と呼ばれる。θ0 は初期位相(initial phase)である。
このように正弦波においては、波の位相部分に常に 2π が表われるので、波の位相に関する量にはあらかじ
めこの 2π を組み込んでおいたほうがよい。そこで、単位時間当りに位相が何ラジアン進むかを表わす量とし
て、角振動数(angular frequency)ω を
ω = 2πν =
2π
T
によって定義し、また、2π ラジアンの位相変化の中にどれだけの波の個数があるかを表わす量として、波数
(wave number)k を
k=
2π
λ
21
を定義しよう。この ω と k を用いて、波の速さ v を表わせば、
ω
k
v=
となり、波の式は
f (x, t) = A sin (kx − ωt + θ0 )
となる。
ここで、オイラーの関係式
eiθ = cos θ + i sin θ
を利用して、この波の式を複素数表示しておくと、量子力学を学ぶ際に非常に都合がよい。これは、少々乱暴
に言うと、sin および cos が複素数の指数を持つ指数関数の実部と虚部であることを利用して、sin θ と eiθ を
同一視しようというものである。これを sin θ ⇒ eiθ のように表わすと、
˜ i(kx−ωt)
A sin (kx − ωt + θ0 ) ⇒ Aei(kx−ωt+θ0 ) = Aeiθ0 ei(kx−ωt) = Ae
˜ は複素振幅と呼ばれる。
となる。ここで A
13 波動関数
ある量子力学的粒子の状態は位置 q と時刻 t の複素関数 ψ(q, t) によって指定される。直交座標系をとって
q = (x, y, z) とするとき,ある時刻 t において,q を中心に持つ微小体積 d3 q = dxdydz 中に,この状態の粒
子が存在する確率は
2
|ψ(q, t)| d3 q
に比例する。従って、ある有限な体積領域 V に 1 個の粒子が存在するときは
∫
2
|ψ(q, t)| d3 q = 1
V
と波動関数を規格化することができる。
波動関数は重ね合わせの原理を満たす。すなわち,粒子が幾つかの状態 ψ1 , ψ2 , . . . に存在可能であるとき,
それらの波動関数の一次結合
ψ = c1 ψ1 + c2 ψ2 + · · ·
が,この粒子の一般的な状態を表す波動関数となる。ここで係数 c1 , c2 , . . . はすべて複素数であり、粒子が ψi
の状態に存在する確率は |ci |2 に比例する。もし、波動関数 ψ が規格化されていれば、この |ci |2 は確率そのも
のになる。
運動エネルギー E ,運動量 p を持つ自由粒子の波動関数は,A を複素数の定数として、
[
ψ(q, t) = A exp
]
i
(p · q − Et)
ℏ
となる。定数 A は規格化条件によって定まる。例えば,1 辺の長さが L の立方体内に 1 個の粒子が存在する
∫
ときは
1=
∫
2
|ψ(r, t)| dV = |A|
2
2
1dV = |A| L3
√
より A = 1/ L3 となる。
粒子が外力を受けて運動するときの波動関数は、このように単純な形にならない。この場合は次章で述べる
Scr¨odinger 方程式を解いて、正確な波動関数を求めることになる。
22
14 Schr¨odinger 方程式
波動関数 ψ(q, t) の空間依存性と時間依存性を結びつける偏微分方程式を Schr¨
odinger 方程式と呼ぶ。量子
力学では考察する物理的状況に応じた Schr¨
odinger 方程式を解いて波動関数を求めることによって,原理的に
は全ての問題を解くことができる。
14.1 自由粒子の Schr¨odinger 方程式
[
自由粒子の波動関数は
ψ(r, t) = A exp
i
(p · r − Et)
ℏ
]
である。この波動関数は,次の微分方程式
iℏ
∂
ℏ2
ψ=−
∆ψ
∂t
2m
を満たす。ここで ∆ = ∇2 は Laplacian である。これが自由粒子の満たす Schr¨
odinger 方程式である。
14.2 ポテンシャル場中にある粒子の Schr¨odinger 方程式
粒子が保存力によるポテンシャル V (r) 中を運動する場合の Schr¨
odinger 方程式は
iℏ
ℏ2
∂
ψ=−
∆ψ + V ψ
∂t
( 2m 2
)
ℏ
= −
∆+V ψ
2m
となる。この場合,力学的エネルギーは保存されるので,粒子の持つエネルギー E は常に一定であり,波動
関数 ψ の時間依存性は自由粒子の場合と同じく e−(i/ℏ)Et となる。波動関数を
ψ(r, t) = ϕ(r)e−(i/ℏ)Et
と変数分離して,Schr¨
odinger 方程式に代入すると,
(
Eϕ =
−
ℏ2
∆+V
2m
)
ϕ
となる。これを時間依存性のない Schr¨
odinger 方程式(Time Independent Schr¨odinger Equation,略して
TISE)と呼ぶ。保存力による量子力学的粒子の運動はこの TISE を解くことによってわかる。
微分方程式を解く場合には,境界条件が必要である。波動関数は粒子の存在確率を表すものであるから,物
理的に考えて,あらゆる領域で連続かつなめらかな関数であるはずである。したがって,これから考察する問
題について,特に注意がなければ,波動関数およびその第 1 次微分係数は全領域で連続である,という境界条
件を課すこととする。
また,微分演算子
H=−
ℏ2
∆+V
2m
はハミルトニアン(Hamiltonian)と呼ばれ,量子力学において大変に重要な演算子である。ハミルトニアン
を決めることは,どのような系を考察するかが決めることと同等である。
23
14.3 確率密度の流れ
波動関数の絶対値の 2 乗 |ψ|2 は粒子の存在確率の密度を表すものであるから、波動関数の流れは、その確
率密度の流れと関係している。
確率密度の流れベクトルを S とすると
S=
ℏ
(ψ ∗ · ∇ψ − ∇ψ ∗ · ψ)
2mi
となる。
[
自由粒子の場合
i
ψ = A exp (p · r − Et)
ℏ
であるから,
S = |A|
2
]
p
∝v
m
となる。ここで,v = p/m は粒子の速度ベクトルである。このように確率密度の流れベクトルは粒子の運動
する状況を表している。
例題
1. 1 次元における Schr¨
odinger 方程式
iℏ
∂
ℏ2 ∂ 2
ψ=−
ψ+Vψ
∂t
2m ∂x2
2
およびその複素共役の式を用いて,確率密度 ρ = |ψ| と確率密度の流れ
S=
の間に連続の方程式
ℏ
2mi
(
ψ∗ ·
∂
∂ ∗
ψ−
ψ ·ψ
∂x
∂x
)
∂
∂
ρ+
S=0
∂t
∂x
が成立することを示せ。ただし,ポテンシャル V は実数とする。
15 1 次元散乱問題
15.1 透過率・反射率
散乱問題における粒子の透過率 T および反射率 R は,確率密度の流れベクトル S を用いて次のように定義
される。
透過率
Strans T =
Sin 24
Sref R=
Sin 反射率
ここで,in,trans,ref はそれぞれ入射波,透過波,反射波を表わす添字である。
粒子数が保存する場合には,
T +R=1
が成立しなければならない。
15.2 壁への衝突
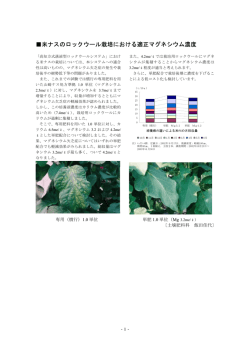
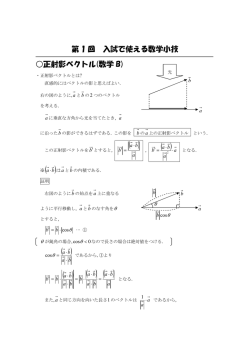
15.2.1 古典的には全反射の場合(E < V )
V
E
x
I
II
0
図1
壁への衝突
図のように,エネルギー E を持った質量 m の粒子が x = −∞ からやって来て,x > 0 の領域のポテンシャ
ル V (> E) の壁に衝突する場合を考える。古典力学で考えれば,粒子は決して x > 0 の領域に達することは
ない。この問題を量子力学で考えてみよう。
全領域で粒子の持つエネルギー E は一定であるから,波動関数を ψ(x, t) = ϕ(x)e−(i/ℏ)Et とおいて,時間
依存を持たない Schr¨
odinger 方程式を解けばよい。
図のように領域 I と領域 II に分けて,Schr¨
odinger 方程式を立てると
ℏ2 ′′
ϕ (領域 I)
2m I
ℏ2 ′′
ϕ + V ϕII (領域 II)
EϕII = −
2m II
EϕI = −
となる。
√
k=
2mE
,κ=
ℏ2
√
2m
(V − E)
ℏ2
とおいて,この 2 式を書き直せば,
ϕ′′I = −k 2 ϕI (領域 I)
ϕ′′II = κ2 ϕII (領域 II)
となる。
25
入射粒子は領域 I における x 正方向の進行波であること,また x → ∞ において波動関数が有限であること
を考えて解を求めれば,
ϕi = eikx + Ae−ikx
ϕII = Be−κx
となる。
この二つの解を x = 0 でなめらかに接続して A,B を求めると,
k 2 − κ2
2kκ
−i 2
k 2 + κ2
k + κ2
2k 2
2kκ
B= 2
−i 2
2
k +κ
k + κ2
A=
となる。
この結果から,透過率 T ,反射率 R を求めると,
T = 0, R = 1
となって,やはり粒子は全部反射されることになる。しかし,B ̸= 0 であるから領域 II における波動関数は
ゼロではない。ϕII = Be−κx であったから,粒子は x = 0 から κ−1 程度の距離まで存在することができる。
これは古典力学にはない現象であり,もし,この壁の厚さがこの距離よりも小さいと粒子は壁の向こう側に現
れることができる。これが後で学ぶ「量子トンネル現象」である。
例題
1. 実際に計算を行って,A,B を求め,確かに T = 0,R = 1 となることを示せ。
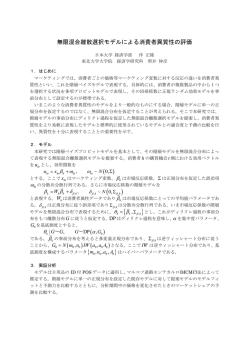
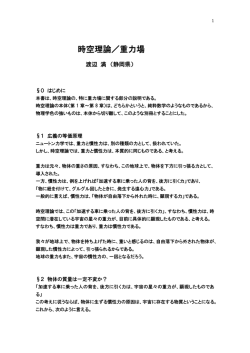
15.2.2 古典的には全透過の場合(E > V )
次の図のように,ポテンシャルエネルギーの高い側から粒子がやって来て,ポテンシャルの低い領域に飛
び込む場合を考えよう。古典力学的にはやって来た全ての粒子がポテンシャルの低い側に飛び込むことがで
きる。
図2
壁の通過
26
粒子のエネルギーを E(> V ) とすると,二つの領域での Schr¨
odinger 方程式は
ℏ2 ′′
ϕ (領域 I)
2m I
ℏ2 ′′
EϕII = −
ϕ + V ϕII (領域 II)
2m II
EϕI = −
である。
√
kI =
とおくと,
2mE
, kII =
ℏ2
√
2m(E − V )
ℏ2
2
ϕ′′I = −kI2 ϕI , ϕ′′II = −kII
ϕII
となる。
入射波は領域 II における左向きの進行波であり,領域 I においては右向きの進行波はないはずであること
に注意して,これらの微分方程式を解くと,
ϕI = Ae−ikI x ,
ϕII = BeikII x + e−ikII x
となる。
この二つの解を x = 0 でなめらかにつなぐと,
2kII
kI + kII
kI − kII
B=−
kI + kII
A=
となる。ここで,B ̸= 0 であることに注意してほしい。これは領域 II において反射波が存在することを示し
ている。実際,透過確率 T ,反射確率 R を計算すると,
4kI kII
,
(kI + kII )2
(kI − kII )2
R=
(kI + kII )2
T =
であるから,確かに反射確率 R はゼロではない。(当然ではあるが T + R = 1 であることに注意しよう。)
このように,量子力学には古典力学からは決して導かれない現象が含まれている。実験技術の進歩が著しい
現在ではこれらの反射現象は実際に観測されている。
例題
1. 実際に計算を行って,T および R を求め,T + R = 1 が成立していることを確かめよ。
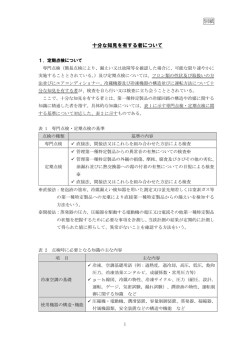
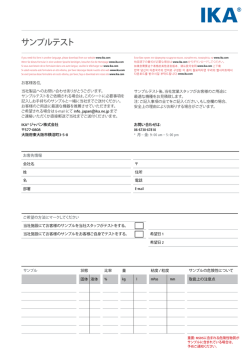
15.3 量子トンネル現象
15.3.1 古典的には全反射の場合(E < V )
次に、ポテンシャルエネルギーが有限の厚さ a でのみ 0 でない場合を考えよう。入射粒子のエネルギー E
がポテンシャルエネルギー V よりも小さい場合,古典力学では粒子は必ず壁に跳ね返され,壁の向こう側に
到達することはない。
27
V
E
I
II
0
図3
III
a
x
有限の厚さを持つ壁への衝突 (1)
図のように領域を分け,それぞれの領域で Schr¨
odinger 方程式を書けば,
ℏ2 ′′
ϕ (領域 I)
2m I
ℏ2 ′′
EϕII = −
ϕ + V ϕII (領域 II)
2m II
2
ℏ ′′
EϕIII = −
ϕ
(領域 III)
2m III
EϕI = −
となる。
√
k=
2mE
, κ=
ℏ2
√
2m(V − E)
ℏ2
とおくと,
ϕ′′I = −k 2 ϕI ,
ϕ′′II = κ2 ϕII ,
ϕ′′III = −k 2 ϕIII
となる。
粒子は領域 I の x = −∞ から右向きに入射する。領域 III では右向きに進行する透過波しか存在しない。
これらのことを考慮して,それぞれの領域での解を書き下せば,
ϕI = eikx + Ae−ikx ,
ϕII = Beκx + Ce−κx ,
ϕIII = Deikx
となる。
28
これらの解を x = 0 と x = a でなめらかにつなぎ,係数 A, B, C, D を求めると,
(
)
1
κ2
A=
× 2 1 + 2 sinh κa,
M
k
(
1 {
κ )}
B=
−2e−κa 1 − i
,
M
k
{
(
)}
κ
1
2eκa 1 + i
,
C=
M
k
1
κ
D = e−ika ×
× 4i ,
M
k
(
)
κ2
κ
M = 2 1 − 2 sinh κa + 4i cosh κa
k
k
となる。
)2
(
κ2
κ2
2
sinh2 κa + 16 2 cosh2 κa
|M | = 4 1 − 2
k
k
であること,また
κ2
V −E
V
=
=
−1
k2
E
E
であることに注意して,透過率 T ・反射率 R を求めると,
{ ( )
(
)}−1
(
)
2
V
V
V
2
sinh κa + 16
−1
× 16
−1 ,
T = |D| = 4
E
E
E
{ ( )
(
)}−1
( )2
2
V
V
V
2
2
R = |A| = 4
sinh κa + 16
−1
×4
sinh2 κa
E
E
E
2
となる。
β = V /E とおいて,さらに見やすい形にすると
[
]−1
β 2 sinh2 κa
T = 1+
,
4(β − 1)
[
]−1
4(β − 1)
R= 1+ 2
β sinh2 κa
となる。このように,量子力学においては,E < V であっても,粒子が壁の向こう側に到達できる確率はゼ
ロではない。この現象を「量子トンネル現象」と呼ぶ。
例題
1. この節の計算を実際に行い,T ,R の値を確かめ,T + R = 1 が成立していることを示せ。
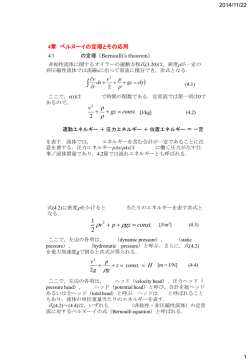
15.3.2 古典的には全透過の場合(E > V )
同じ壁の衝突問題で,粒子の入射エネルギー E がポテンシャルエネルギー V よりも大きな場合を考えよう。
古典力学では,このような場合,すべての粒子は壁を透過する。
29
E
V
I
II
0
図4
III
x
a
有限の厚さを持つ壁への衝突 (2)
図のように領域を分け,それぞれの領域で Schr¨
odinger 方程式を解き,x = 0 と x = a でそれらの解をなめ
らかにつなぎ,透過率 T ,反射率 R を求めると,β = V /E, k ′ =
√
2m(E − V )/ℏ2 として,
[
]−1
β 2 sin2 k ′ a
,
T = 1+
4(1 − β)
[
]−1
4(1 − β)
R= 1+ 2 2 ′
β sin k a
となる。ここで,R ̸= 0 に注意しよう。量子力学では,このような場合に粒子が反射する確率がゼロでないの
である。ただし,sin k ′ a = 0 であるとき,すなわち,
k ′ a = nπ (n = 1, 2, . . .)
を満たす特別な場合には,R = 0 となり反射が起こらない。
例題
1. この節の結果を実際の計算によって確認せよ。
16 1 次元束縛問題
束縛状態とは,粒子が空間内のある領域に閉じ込められている状態のことである。この場合,無限遠方で波
動関数は消えなければならない。すなわち,境界条件として
ψ → 0 (|r| → 0)
が課せられる。この境界条件によって,粒子のもつエネルギーは勝手な値を取れなくなり,エネルギーは量子
化される。
30
V
E
I
II
III
a
-a
図5
x
有限の深さの量子井戸
16.1 有限井戸
図のような,有限の深さを持つポテンシャル井戸の中にエネルギー E をもつ粒子が閉じこめられている場
合を考察しよう。それぞれの領域での Schr¨
odinger 方程式は
ℏ2 ′′
ϕ + V ϕI (領域 I)
2m I
ℏ2 ′′
EϕII = −
ϕ (領域 II)
2m II
ℏ2 ′′
EϕIII = −
ϕ + V ϕIII (領域 III)
2m III
EϕI = −
である。
√
k=
2mE
, κ=
ℏ2
√
2m(V − E)
ℏ2
とおき,|x| → ∞ で波動関数が消えなければならないことを考慮して,それぞれの領域で解を書き下せば,
ϕI = Aeκx ,
ϕII = Be−ikx + Ceikx ,
ϕIII = De−κx
となる。
次に,x = −a と x = a で解をなめらかにつなぐと,係数の間の条件は
Ae−κa = Beika + Ce−ika ,
(
)
Aκe−κa = −ik Beika − Ce−ika ,
Be−ika + Ceika = De−κa ,
)
−ik Be−ika − Ceika = −κDe−κa
(
である。これらの式から A,D を消去すると
B (κ + ik) eika + C (κ − ik) e−ika = 0,
B (κ − ik) e−ika + C (κ + ik) eika = 0
である。この 2 式が B = C = 0 以外の解を持つための必要十分条件は係数行列式がゼロになること,すな
わち,
{
}2 {
}2
(κ + ik) eika − (κ − ik) e−ika = 0
31
である。少し計算すると,この条件式は
(κ + ik) eika + (κ − ik) e−ika = 0 (条件 1)
(κ + ik) eika − (κ − ik) e−ika = 0 (条件 2)
の二つの条件に分けられることがわかる。
• 条件 1
この条件を少し変形すると,
k tan ka = κ
となる。
ξ = ka, η = κa
とおくと,この条件式は
η = ξ tan ξ
となる。
• 条件 2
この条件を少し変形すると,
−k cot ka = κ
となる。
ξ = ka, η = κa
とおくと,この条件式は
η = −ξ cot ξ
となる。
ここで ξ と η は独立ではなく
ξ2 + η2 =
2mV 2
a
ℏ2
という関係によって結びついていることに注意しよう。
以上より,有限の深さの量子井戸中に粒子が閉じこめられている場合,
ξ 2 + η2 =
または
ξ 2 + η2 =
2mV 2
a かつ η = ξ tan ξ
ℏ2
2mV 2
a かつ η = −ξ cot ξ
ℏ2
を満たす ξ ,η を与えるエネルギー値 E でのみ,井戸中にゼロでない波動関数が存在することになる。これが
束縛状態におけるエネルギー量子化の例である。
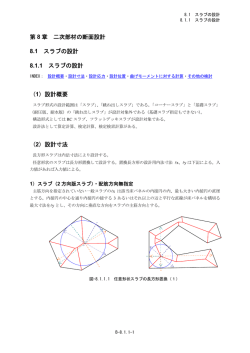
これらの条件を図示すると以下のようになる。図において横軸は ξ ,縦軸は η である。円周の半径が大きく
なることは,V の値が大きくなることに対応している。円の半径を固定したとき,その円と η = ξ tan ξ また
は η = −ξ cot ξ との交点が許される ξ の値を与える。V がどんなに小さくても少なくとも一つの交点が存在
すること,V が大きくなるほど交点の数は多くなることに注意しよう。
例題
1. この節のすべての式を実際の計算によって確かめよ。
32
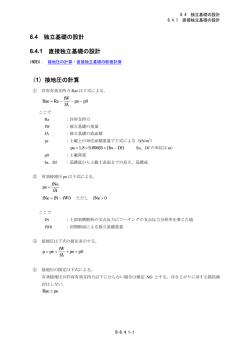
10
8
6
4
2
0
図6
2
4
6
8
10
量子井戸中でのエネルギー固有値の量子化:η = ξ tan ξ と η = −ξ cot ξ のグラフに ξ 2 + η 2 = 72
のグラフを重ねて描いたもの。これは
√
(2mV /ℏ2 )a2 = 7 である量子井戸中の束縛状態を計算したことに
相当する。
17 1 次元調和振動子
1 次元調和振動子(Harmonic Oscillator)はポテンシャル V (x) = 12 mω 2 x2 中で束縛運動をする力学系で
ある。古典力学では運動方程式は
d
x = −ω 2 x
dt
であり,一般解は振幅を A,初期位相を θ として
x = A sin (ωt + θ)
であらわされる。また,この系の力学的エネルギーは
E=
1
1
1
mv 2 + mω 2 x2 = mω 2 A2
2
2
2
と一定で,また振幅 A が任意の実数値を取れることから,E もまた任意の実数値を取り得る。この 1 次元調
和振動子を量子力学的に考えてみよう。
波動関数を Ψ(x) とすると,Schr¨
odinger 方程式は
−
ℏ2 ′′
1
Ψ (x) + mω 2 x2 Ψ(x) = EΨ(x)
2m
2
(48)
である。まず,変数変換を行ってこの方程式を無次元化しよう。こうすることにより,変数がすべて 1 程度
の大きさになり式の構造がはっきりと見えるようになる。初めに,ℏω がエネルギーの次元を持つことから,
λ = 2E/ℏω と置こう。このとき式 (48) は
(
mω 2 )
ℏ2 ′′
Ψ + ℏω λ −
x Ψ=0
m
ℏ
となる。さらに,
√
mω/ℏ(= α) が長さの逆数の次元を持つことに注意し,ξ = αx とおくと,
(
)
Ψ′′ (ξ) + λ − ξ 2 Ψ(ξ) = 0
33
(49)
となる。ここで,束縛状態の境界条件から Ψ(ξ) → 0 (ξ → ±∞) であることに注意しよう。この微分方程式の
解は少々複雑であるが以下の方法によって見つけることができる。
まず,λ = 2E/ℏω は一定であることに注意して,ξ 2 が λ に比べて十分大きな領域(ξ 2 ≫ λ)での解の振る
舞いを考えよう。この領域では式 (49) は Ψ′′ ∼ ξ 2 Ψ を満たすようになっているはずである。このような振る
舞いをする関数として e±ξ
2
/2
= u(ξ) がある。実際,u(xi) は微分方程式
(
)
u′′ + ∓1 − ξ 2 u = 0
を満たし,この微分方程式は ξ 2 が十分大きい領域で式 (49) と同じ形になる。そこで,ξ → ±∞ での境界条
件を考慮して,
Ψ(ξ) = φ(ξ)e−ξ
2
/2
の形の解を求めることする。この置換えにより φ が満たすべき微分方程式は,
φ′′ − 2ξφ′ + (λ − 1) φ = 0
(50)
となる。ここで φ は ξ → ±∞ の領域で,e−ξ /2 よりも強く発散してはいけないことに注意しよう。以下に
2
見る通り,この制限により λ = 2E/ℏω の取り得る値が制限されてしまう。これが調和振動子におけるエネル
ギー固有値の量子化である。
φ(ξ) =
∞
∑
ak ξ k
(51)
k=0
と置き,無限級数の形で解を探そう。これを式 (50) に代入して整理すると
a0 (λ − 1) + 2a2 +
∞
∑
{ak+2 (k + 2) (k + 1) − (2k + 1 − λ) ak } ξ k = 0
k=1
となる。従って,
ak+2 =
2k + 1 − λ
ak
(k + 2) (k + 1)
(k = 0, 1, 2, . . . )
(52)
でなければならない。ここで,どのような k についても ak ̸= 0 であると仮定しよう。このときは式 (51) は
無限級数となる。k が十分大きい時の係数 ak の振舞は
ak+2
2k + 1 − λ
2k
2
=
∼ 2 ∼
ak
(k + 2) (k + 1)
k
k
(53)
2
である。ここで,(やや天下りではあるが)関数 eξ の無限級数展開を考えると
2
eξ =
∞
∑
1 { 2 }l
ξ
l!
l=0
= 1 + ξ2 +
1
1 4
1
) ξ k+2 + . . . (ただし k は偶数)
ξ + · · · + ( k ) ξk + ( k
2!
+
1
!
!
2
2
であるから,偶数次の ξ k の係数 bk について
)
(
1/ k2 + 1 !
bk+2
( )
=
=
bk
1/ k2 !
k
2
2
1
2
=
∼
k
+
2
k
+1
となり,式 (53) と振舞が同じになる。従って,どのような k についても ak ̸= 0 であるときの φ(ξ) には eξ
のように振る舞う項が含まれ,もとの Ψ(ξ) = φ(ξ)e−ξ
2
/2
34
については eξ e−ξ
2
2
/2
= eξ
2
/2
2
のように ξ → ±∞ で
発散する項が含まれることになる。これでは無限遠方での境界条件 Ψ → 0 を満たすことはできないので,境
界条件を満たす φ の級数展開 (51) は必ず有限項で終わらなければならない。これはある自然数*5 k(これを n
としよう)より後の ak がすべてゼロとなることを意味するから,式 (52) より,この n について,λ = 2n + 1
が成立しなければならない。つまり,λ = 2E/ℏω はある自然数 n によって λ = 2n + 1 と表せる値しか取る
ことができない。これが量子力学的調和振動子のエネルギー量子化である。もとの変数に戻すと,
(
)
1
E = ℏω n +
2
となる。注目すべきことはエネルギー固有値の最小値(n = 0)がゼロでない値 ℏω/2 を取ることである。こ
れは,不確定性原理によりエネルギーが最小の状態でも,粒子が x = 0 の確定した状態にいられないことと関
係している。このエネルギー最小値をゼロ点エネルギーと呼び,量子力学的調和振動子がこのエネルギー最小
状態で行う微小振動をゼロ点振動と呼ぶ。
λ = 2n + 1 のときの φ(ξ) が満たすべき微分方程式は,式 (50) より,
φ′′ − 2ξφ′ + 2nφ = 0
(54)
となるが,これは,フランスの数学者 Hermite(エルミート)の名前を冠してエルミート微分方程式と呼ばれ
る微分方程式に変形することができ,与えられた n の値に対応する解 φn ) は,n 次のエルミート多項式 Hn (ξ)
と呼ばれる関数を用いて表わすことができる。*6 具体的な φ の形は,例えば n = 0, 1, 2, 3 について
φ0 (ξ) = 1
√
φ1 (ξ) = 2ξ
φ2 (ξ) = 2ξ 2 − 1
√
√
φ3 (ξ) = 2 2ξ 3 − 3 2ξ
となる。調和振動子の波動関数については Ψ = φn e−ξ /2 として計算し,最後にもとの変数に戻して,規格
2
化条件を課せばよい。
2.0
1.5
1.0
0.5
4
2
2
4
Ξ
0.5
1.0
1.5
図7
*5
*6
1 次元調和振動子の波動関数
ここでの自然数は 0 を含む。
エルミート多項式については,例えば,岩波書店発行の「岩波数学公式 III」pp91-94 に詳しく載っている。
35
© Copyright 2026 Paperzz