1
LQ 制御の要約
制御の特徴
評価関数を最小化する最適制御入力を状態フィードバックの形で求める
制御理論である.レギュレータ問題を解く制御である.
長所
最適性を得られたコントローラは,モデルベースに作成されているので,
フィードバックだけでなく,フィードフォワードとしても使える.評価
関数の重み行列は,状態に関するものを非負定値,入力に関するものを
正定値にさえ与えれば,閉ループシステムは必ず安定になる利点をもつ.
また,位相余裕は 60 度,ゲイン余裕は無限大という優れたロバスト性
を保有している.
短所
評価関数の重みの設定が必要で,その設定が一意でない.しかし,それ
が制御の自由度であり,欠点だけではないが初心者には選定が難しい.
制御対象のクラス
線形系,時変系
制約条件
特になし
制御系設計条件
可制御性の保証
設計手順
Step1 評価関数の重み行列の設定
Step2 リカッチ方程式の導出と解の導出
Step3 コントローラゲインの導出
Step4 制御入力と応答のシミュレーション
Step5 制御入力を見て制約条件を満たしているか,制御応答が制御仕様
を満足しているかどうかにより,評価関数の重み行列を変更し,Step2Step4 を,制御仕様が満足されるまで繰り返す.
実応用例
2
多くの産業応用例があり、第 3 部の制御系設計の応用編で紹介
LQ 制御の概念
次式の状態方程式で示される制御対象を取り扱う.ただし,可制御なシステムとする.
ẋ(t) = Ax(t) + Bu(t), x(t0 ) = x0 , A ∈ Rn×n , B ∈ Rn×m
式 (1) のコントローラを求めるため次の評価関数 (Performance Index) を設ける.
∫ ∞
J=
{xT (t)Qx(t) + uT (t)Ru(t)}dt
(1)
(2)
0
ただし,Q は非負定値対称行列であり,R は正定値対称行列である.LQ(Linear Quadratic)
制御では,目標値を原点 (零) とするレギュレータ問題を取り扱い,式 (2) を最小にするコ
ントローラを求める.なお,状態方程式は目標値の周りで線形化された状態方程式 (1) を
取り扱う.したがって,評価関数 (2) の第 1 項 xT (t)Qx(t) は目標値からの誤差を表し,第
2 項 uT (t)Ru(t) はエネルギーを表す.
一般的には,Q ⇒ 大きくする ⇒速応性が増す ⇒ 制御入力が大きくなる,
また,R ⇒ 大きくする ⇒制御入力が小さくなる ⇒ 速応性が悪くなる傾向がある.
Q と R はトレードオフの関係にあり,それらの妥協をはかり,Q と R を選定する.Q と
R を決めるた後は,式 (1) を最小にする最適な制御入力が次のように一意的に決まる.
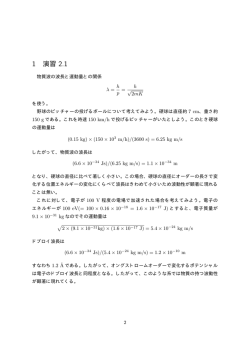
u
x_ = Ax + Bu
-
x
R¡1 B T P
図 1: 制御系
u(t) = −F x(t)
F =
R−1 B T P
}
(3)
行列 P (Rn×n ) は,リカッチ方程式 (Ricatti equation)
AT P + P A + Q − P BR−1 B T P = 0
(4)
の正定値対称行列解であり,(A, B) が可制御のとき,このような P は唯一に存在する.こ
のとき J の最小値は
min J = xT (0)P x(0)
u
となる.式 (3) を式 (1) に代入したときの,最適な閉ループ系は,
(
)
ẋ(t) = A − BR−1 B T P x(t)
(5)
(6)
となり,初期値 x0 が非零のプラントの状態ベクトル x を適当な操作入力 u により原点に
接す最適レギュレータとなっている.この制御を LQ 制御と呼ぶ.式 (1) の線形システム
(Linear) を取り扱い,評価関数が 2 次形式 (Quadratic) なので,LQ 制御とよぶ.図 1 に
LQ 制御系の構成を示す.
3
LQ 制御の設計法
式 (3) のコントローラは,変分法,最大原理,動的計画法などで導出できるが,簡単な
Brockett の方法を示す 1) .
まず (A, B) が可制御で,J の最小値が存在するには,t → ∞ のとき,x(t) → 0 でなけ
ればならない.
そこで,
[
]∞
∫ ∞
)
d ( T
T
x (t)P x(t) dt = x (t)P x(t)
dt
0
0
= xT (∞)P x(∞) − xT (0)P x(0) = −xT (0)P x(0)
∫ ∞
( T
)
=
ẋ (t)P x(t) + xT (t)P ẋ(t) dt
∫0 ∞ {
}
=
(Ax + Bu)T P x + xT P (Ax + Bu) dt
∫0 ∞
{ T( T
)
}
=
x A P + P A x + uT B T P x + xT P Bu dt
0
すなわち,
∫
∞
(
)
{xT (t) AT P + P A x(t) + uT (t)B T P x(t) + xT (t)P Bu(t)}dt + xT (0)P x(0) = 0
(7)
0
式 (7) を式 (2) に加えると,
∫ ∞[
J = xT (0)P x(0) +
xT (t)Qx(t) + uT (t)Ru(t)
0
]
{
}
+ xT (t) AT P + P A x(t) + uT (t)B T P x(t) + xT (t)P Bu(t) dt
∫ ∞[
(
)T (
)
u + R−1 B T P x R u + R−1 B T P x
= xT (0)P x(0) +
0
]
+ xT {AT P + P A + Q − P BR−1 B T P }x dt
J を最小にするには,右辺第 2 項を零とすればよく,そのために次式を得る.
u = −R−1 B T P x(t),
AT P + P A + Q − P BR−1 B T P = 0
よって,
min J = xT (0)P x(0)
u
また閉ループ系の式 (6) の安定性は,式 (4) を F = R−1 B T P を用いて書き直すと,
AT P − P T BR−1 B T P + P A − P BR−1 B T P = −Q − P BR−1 B T P
AT P − F T B T P + P A − P BF = −Q − P T BR−1 RR−1 B T P
AT P − (BF )T P + P A − P (BF ) = −Q − F T R−1 F
(A − BF )T P + P (A − BF ) = −(Q + F T RF )
となり,Q + F T RF > 0,P > 0 であるので,リアプノフの定理より A − BF の固有値は,負の実
部を持つ漸近安定なものとなる.このように,LQ 制御の特徴は,Q ≥ 0,R ≥ 0 に与えさえすれ
ば,閉ループ系は安定になることである.
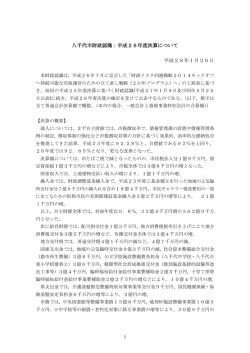
次に,カルマンの不等式 (最適レギュレータの円条件) から直接導かれる最適レギュレータのロ
バスト性について,結果のみ示す 2) .
1. 最適レギュレータのゲイン余裕は,最小 0.5,最大 +∞ である.
2. 最適レギュレータは 60◦ 以上の位相余裕をもつ
次に式 (4) のリカッチ方程式の解法を示す.
リカッチ方程式の解法 ここでは,有本-Potter の方法を示す.
Step1. 次のハミルトン行列 (Hamilton matrix)
[
]
A −BR−1 B T
H=
−Q
−AT
の固有値を求め,実部が負のものを
{λ1 , · · · , λn } とし,対応する固有ベクトルを
{[
]
[
]}
v1
vn
n
,··· ,
, vi ∈ R , ui ∈ Rn とする.
u1
un
(8)
Step2. 次式により P を求める.
P = [u1 , u2 , · · · , un ] [v1 , v2 , · · · , vn ]
(証明)
まず,
{[
−1
(9)
][
λI − A + BF
BR−1 B T
0
−λI − AT + F T B T
)
(
= det (λI − A + BF ) det −λI − AT + F T B T
[
]
A B
..
( . det
= detAdetC )
0 C
det (λI − H) = det
I
P
0
−I
][
I
−P
0
I
]}
(10)
と変形すると H の固有値は複素平面上実軸及び虚軸について対称に分布し,左半面に配置する n
個の固有値 λ1 , · · · , λn が A − BF の極となる.
[
]T
λi に対応する固有値ベクトルを viT , uT
とすると,式 (10) により
i
[
] [
][
][
][
]
vi
I
0
λi − A + BF
BR−1 B T
I
0
vi
(λi I − H)
=
=0
ui
P −I
−P I
ui
0
−λI − AT + F T B T
これにより次式が成立する.
{
−1 T
(λ
( i I − A)Tvi + BR
) B ui =
( 0
)
T T
λi I − A − F B P vi − λi I + AT − FT BT ui = 0
したがって,
{
P
( vi = uiT, )
λi I − A BF vi = 0
となり,次式を得る.
P [v1 , v2 , · · · , vn ] = [u1 , u2 , · · · , un ]
これにより,
P = [u1 , u2 , · · · , un ] [v1 , v2 , · · · , vn ]
−1
が導かれる.
Im
¡2
¡1
0
Re
P (j!) = k(j!I ¡ A)¡1 B
図 2: 最適レギュレータのロバスト性 (円条件)
4
LQ 制御の設計例
[例 1] 次式のシステムを考える.
[
]
[
]
1 0
2
x(t) +
u(t)
ẋ(t) =
−1 1
−1
[
x(0) =
1
1
(11)
]
[
]
25 0
式 (2) の評価関数を,Q =
,R = 1 とすると,
0 20
[
]
}
∫ ∞{
25 0
J =
xT (t)
x(t) + u2 (t) dt
0 20
0
(12)
さて,ハミルトン行列を求めると次式となる.
[
H
=
A −BR−1 B T
−Q
−AT
]
0
−4
1
2
0
−1
−20 0
1
−1
=
−25
0
2
−1
1
−1
(13)
固有値は 11,
−11,1,
−1 である.安定な固有値 λ1 = −11,
λ2 = −1 に対応する固有ベクトルは,各々
−2.4
1
[
] 1
[
] 0
v1
v2
,
·
·
·
···
=
=
u1
u2
−6.2
13
1
25
よって,
[
P =
−6.2 13
2
25
][
−2.4 1
1
0
]−1
[
=
13
25
25
62
]
したがって,
u(t) = −R−1 B T P x(t)
[
[
] 13
= − 2 −1
25
25
62
]
x(t) = −x1 (t) + 12x2 (t)
となり,LQ コントローラが求まった.
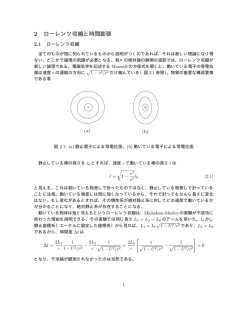
ここで,R を R = 1000 と与えると,u(t) = −x1 (t) + 2.06x2 (t) となり,図 3 の点線のようにな
る.状態変数 x への重みが大きいので,収束が速いが,入力の大きさは大きくなっている.これ
が,入力制約を越しているときは,R の重みを大きくするか,または,Q の重みを小さくし,妥協
を図らないといけない.
なお,リカッチ方程式の解き方は,逐次計算法などの解法がある.
逐次計算法では,非定常リカッチ方程式を,
{
Ṗ (t) = P (t)A + AT P (t) − P (t)BR−1 B T P (t) + Q
P (tf ) = 0
時間を逆向きにして計算し,P (−∞) を求める.
このように,LQ 制御は,重みを与えたとき,その重みに対して評価関数 J を最小にするという
意味で最適な制御入力を求めることができる,数理的な意味での最適である.しかしながら現実社
u(t)
10
R=1
R=1000
5
0
x1(t)
0
3
2
3
4
5
6
7
8
1
2
3
4
5
6
7
8
1
2
3
4
Time[s]
5
6
7
8
2
1
0
0
1
x2(t)
1
0.5
0
0
図 3: LQ 制御シミュレーション
会の工学的な意味での最適は,エネルギー最小やエネルギーをいくら以下,制御時間や最大振幅を
いくら以下などという制約が入ってくる.これに対して,計算機の発達により,計算時間が短縮さ
れてきたことにより,LQ 制御問題の Q,R を試行錯誤で苦労することなく自動的に求めることが
できるようになってきた.一例として,工学的な意味での評価規範を与え,これに対して,LQ 制
御の Q,R をシンプレックス法による最適化手法により,自動的に求めている浜口,寺嶋らの研究
がある 3) .これの利点は,Q,R の与え方によらず,閉ループ系が安定であり,状態フィードバッ
ク形で与えられる点である.
参考文献
1) 吉田勝久,川路茂保,美多勉,原辰次;メカニカルシステム制御,オーム社,(1990)
2) 浜田望,松本直樹,高橋徹;現代制御理論入門,コロナ社,(2000)
3) 浜口雅史,寺嶋一彦,野村宏之;各種設計条件における液体タンクの最適搬送制御,日本機械
学會論文集 (C 編),60 巻,573 号,(1994),pp.182-189
© Copyright 2026 Paperzz